и индивидуальных вентильных преобразователей, задатчик тока якорей тяговых двигателей, датчики ЭДС 12 и скорости тяговых двигателей, послед-и ние из которых связаны с блоком 14 выделения экстремальной частоты вращения колесных пар и формирователь сигналов. Формирователь сигналов состоит из блока сравнения, дифференци-
1
Изобретение относится к автоматиескому электроприводу и может быть спользовано для электровоза переенного тока с двигателями независиого возбуждения..
.
Цель изобретения - повышение реаизуемой силы тяги.
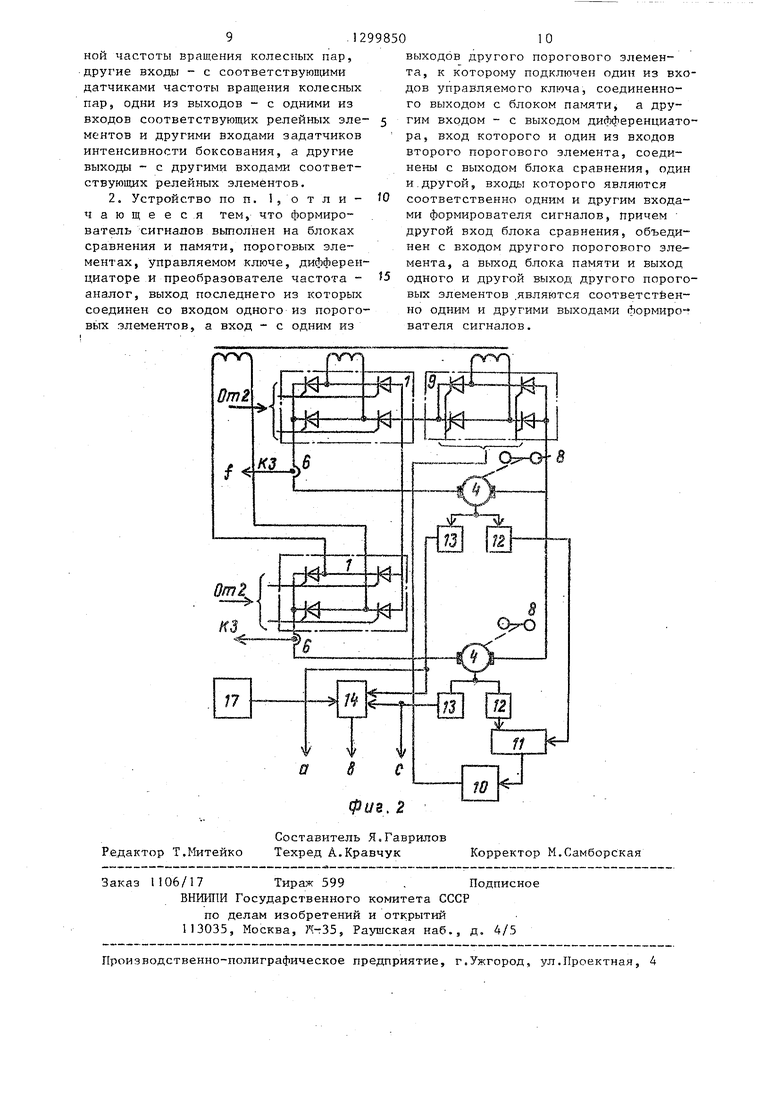
На фиг.1 и 2 представлена функциональная схема устройства для управ- fo ения тяговым электроприводом электровоза.
Устройство для управления Фяговым электроприводом электровоза содержит 15 по числу тяговых двигателей индивидуальные вентильные преобразователи 1, блоки 2 импульсно-фазового управления которыми входами подключены к выходам регуляторов 3 тока якорей 20 4 тяговых двигателей, соединенных входами с выходами соответственно задатчика 5 и датчиков 6 тока яко- тяговых двигателей и задатчиков 7 интенсивности боксовяния Колесных пар 8, групповой вентильный преобразователь 9, с одним из выходов которого соединень одни из выводов якорей 4 тяговых двигателей, подключенных другими выводами к одним из вы- 30 ходов соответствующих индивидуальных вентильных преобразователей 1, выходы которых соединены с другим выходом группового вентильного преобразователя 9, блок 10 импульсно- 35 фазового управления которым входом соединен с выходом блока 11 выделения минимальной ЭДС тяговых двигателей, подключенного входом к выходам датчиков 12 ЭДС тяговых двига- 40 телей, датчики 13 частоты вращения колесных пар, подключенные выходами
атора, пороговых элементов и преобразователя частота - аналог, блока памяти. Снижение напряжения задания на входе регулятора 2 тока для восстановления сцепления колеса с рельсом производится на определенную величину, исходя из интенсивности процессов боксования или юза колесных пар. 1 3.п. ф-лы, 1 ил.
к одним из входов блока 14 выделения экстремальной частоты вращен ия колесных пар и к входам а формирователей 15 сигналов, входы в которых соединены с выходом блока i 4 выделения экстремальной частоты вращения колеснйх пар, а выхода1 а, в и с - с входами а и в релейных элементов 16 и с релейных элементов 16 и а задатчиков 7 интенсивности боксования, входы в которых подключены к выходам релейных элементов 16, и задатчик 17 режима работы тяговых, выходом подключенный к другому входу блока 14 выделения экстремальной частоты вращения колесных пар, с выходом которого соединены входы в формирователей 15 сигналов. Формирователь 15 сигналов йа блоках сравнения 18 и памяти 19, по- роговьш элементах 20 и 2 i, управляемом ключе 22, дифференциаторе 23 и преобразователе 24 частота - аналог, выход которого соединен с входом порогового элемента 21, а вход - с выходом а порогового элемента 20, к которому подключен вход а управляемого ключа 22, соединенного выходом с блоком 18 памяти, а входом в - с выходом дифференциатора 23, вход которого и вход а порогового элемента 20 соединен с выходом блока 18 сравнения, один и другой входы которого являются входами а и в формирователя 15 сигналов, причем один из входов блока 18 сравне- лия объединен с входом в порогового элемента 20, а выходы блока 19 памяти, порогового элемента 21 и выход в элемента 20 являются выходами с, а и в формирователя сигналов соответственно.
3.
Устр(5Йства для управления тяговы электроприводом электровоза работае следующим образом.
Сигнал задания тока от задатчика 5 тока якорей тяговых двигателей в виде регулируемого напряжения поступает на входы регуляторов 3 тока, где сравнивается с сигналом обратной связи по току. Разность этих синалов поступает на входы соответст- вующих блоков 2 импульсно-фазового управления индивидуальными вентильными преобразователями. Блоки 2 каждого вентильного преобразователя фоэ-
мируют на выходах импульсы управле ния вентилями преобразователей.
В соответствии с фазой управляющих импульсов, величина которой зависит от уровня напряжения задания на входе регуляторов 3 тока, на вых дах индивидуальных вентильных.преобразователей 1 появляется регулируемое по фазе выходное напряжение, которое прикладывается через группово вентильный преобразователь 9 к якорям 4 тяговых электродвигателей постоянного тока.
Питание тяговых двигателей осу
ществляется по индивидуально-группо- JQ ся минимальный из сигналов скоросвой схеме, т.е. от группового вентильного преобразователя 9 и индивидуальных вентильных преобразователей 1, 80 - 85% напряжения на двигателях
обеспечивается групповым преобразова- с мируется максимальный из сигналов телам и лишь 15 -20% - индивидуаль- скоростей колесных пар секции элекными.
Б момент разгона двигателей при .ЭДС, равной нулю, групповой преобразователь 9 напряжения не выдает, а лишь обеспечивает цепь для прохождения тока нагрузки от напряжений индивидуальных вентильных преобразователей 1. При появлении сигналов от
соответствующих датчиков 12 ЭДС тяго- з торого пропорциональна разности лп
вых двигателей групповой вентильный преобразователь 9 под действием сигнала, поступающего на блок 10 импульсно-фазового управления с выхода блока I1 выделения минимальной из ЭДС 50 тяговых двигателей, начинает функционировать. Таким образом, нарастание напряжения на двигателях при разгоне обеспечивается групповым преоб1,-„, где п - скорость боксующей колесной пары, п „j - минимальная из скоростей колесных пар секции электровоза.
Выходной сигнал блока 18 сравнения подается на вход дифференциатор 23, на выходе которого формируется сигнал, величина которого пропорциональна скорости нарастания сигнала.
разователем 6 от возрастающего сигна-55 о этому сигналу можно судить об интенсивности возникшего режима боксования колесной пары. Выходной сигнал блока 18 сравнения подается на вход
ла ЭДС двигателей. Индивидуальные преобразователи обеспечивают регулирование токов в якорях двигателей на уровне, определяемом сигналом порогового элемента 20, на выход
5 -3
0
25
Дания, т.е. происходит выравнивание нагрузок тяговых двигателей независимого возбуждения. Выходное напряжение индивидуальных преобразователей I рассчитано на создание максимально допустимот о рабочего тока двигателя и на покрытие расхождения в ЭДС двигателей, достигаю01его в основном диапазоне скоростей и нагрузок ±3,5%. Применение в схеме индивидуальных вентильных преобразователей позволяет получить на валах двигателей, а следовательно, на ободах колес примерно равные моменты и силы тяги независимо от разбросов характеристик двигателей, в результате чего повышается реализуемая сила тяги электровоза. I
Рассмотрим работу устройства управления тяговым электроприводом электровоза при возникновении режима боксования или юза. На выходах датчиков 13 скоростей формируются сигналы, пропорциональные скоростям колесных пар. При движении электровоза в режиме тяги на выходе задатчика режима 17 формируется сигнал 1 и на выходе блока 14 выделяеттей колесных пар. При движении электровоза в режиме торможения на выходе задатчика 17 режима формируется сигнал О и на выходе блока 14 фортровоза.
При возникновении режима боксования какой-либо из колесных пар, ког- да скорость ее начинает возрастать и превышать значение минимальной из скоростей колесных пар секции элек- тровоза, на выходе блока iS сравнения формируется сигнал, величина ко1,-„, где п - скорость бок, сующей колесной пары, п „j - минимальная из скоростей колесных пар секции электровоза.
Выходной сигнал блока 18 сравнения подается на вход дифференциатора 23, на выходе которого формируется сигнал, величина которого пропорциональна скорости нарастания сигнала.
а порогового элемента 20, на выход
в которого поступает сигнал датчика 13 скорости, т.е. при увеличении скорости колесной пары уставка порогового элемента 20 не остается постоянной, а изменяется, что позволя- ет достаточно точно определить момент начала боксования или юза колесной пары при различных скоростях движения электровоза.
В том случае, если величина превысит уставку порогового элемента 20, происходит срабатывание последнего, в результате чего на его выходе а формируется импульс определенной длительности, который подается на вход а управляемого ключа 22. Последний замыкается и выходной сигнал дифференциатора 23, величина которого пропорциональна интенсивности процесса боксования, записывает- ся в блок 19 памяти и с его выхода подается на вход
с релейного эле- а задатчика 7
мента 16 и на вход HHfенсивности.
На выходе в порогового элемента 20 формируется аналоговый сигнал , который подается на вход в релейного элемента 16, величина выходного сигнала которого зависит от выходного сигнала блока 19 памяти, а следовательно, от интенсивности процесса боксования колесной пары.
Выходной сигнал релейного элемента 16, величина которого пропорциональна интенсивности процесса боксования, передается без изменения чер задатчик 7 интенсивности боксования на один из входов регулятора 3 тока и снижает величину напряжения задания Скорость боксующей колесной пары уменьшается, и происходит процесс восстановления сцепления колеса с рельсом. При приближении скорости боксующей колесной пары к значению минимальной из скоростей колесных пар, на выходе блока 18 сравнения сигнал йп становится меньше значения уставки порогового элемента 20, что приводит к его отключению и отключению релейного элемента 16. Однако уменьшение выходного сигнала задатчика 7 интенсивности боксования, что соответствует увеличению напряжения задания на входе регул я- тора 3 тока, происходит с некоторым темпом, величина которого так же зависит от интенсивности, с которой
5 0
5
0
5
0
проходил процесс боксования колесной пары. - ,
Это связано с тем, что при резком набросе нагрузки на боксовавшую колесную пару, возможен повторный срыв сцепления колеса с рельсом. Таким образом, чем интенсивней происходит боксование колесной пары, тем медленнее необходимо увеличивать нагрузку на колесную пару до заданного значения.
При возникновении юза какой-либо из колесных пар секции электровоза На выходе блока 18 сравнения формируется сигнал, величина которого пропорциональна разности Ап н(акк ц где максимальная из скоростей колесных пар секции электровоза, скорость юзующей колесной пары.
Выходной сигнал блока 18 сравнения подается на вход дифференциатора 23, на выходе которого формируется сигнал, величина которого пропорциональна скорости нарастания сигна- ла йп. По величине выходного сигнала дифференциатора- 23 можно судить об интенсивности процесса юза колесной пары. Выходной сигнал блока 18 сравнения подается также на вход а порогового элемента 20. Если величина сигнала & п превьшает величину уставки, то йроисходит срабатывание порогового элемента 20, в результате чего на его выходе а формируется импульс определенной длительности, который подается на вход а управляемого ключа 22. Последний замыкается и выходной сигнал дифференциатора 23, величина которого пропор1щональ- на интенсивности процесса юза, записывается в устройство памяти 19. На выходе в порогового элемента 20 e формируется аналоговьй сигнал, который подается на вход в релейного элемента 16, величина выходного сигнала которого зависит от,выходного сигнала блока 19 памяти, пропорционального интенсивности процесса юза колесной пары. Выходной сигнал релейного элемента 16, величина которого пропорциональна интенсивности процес - са юза, передается без изменения на один из входов регулятора 3 тока « снижает напряжение задания на его входе до определенной величины,- что приводит к снижению тормозной силы тягового двигателя на величину, про0
5
712
порциональную интенсивности процесса юза колесной пары.
После прекращения процесса юза скорость колесной пары приближается к значению максимашьной из скоростей колесных пар секции электровоза, и пороговый элемент 20 отключается, что приводит к отключению релейного элемента 16. Однако уменьшение выходного сигнала задатчика интенсивное- ти 7, что соответствует увеличению напряжения задания на входе регулятора, 3 тока якоря, происходит с некоторым темпом, величина которого зависит от интенсивности, с которой про- ходил процесс юза колесной пары.
В реальных условиях возможен режим, при котором срьш сцепления колеса с рельсом с его последующим восстановлением повторяются периодичес- ки в течение определенного промежутка времени.
В этом случае на выходе
а
порогового элемента 20 формируется после- 25 ми входами подключены к выходам редовательность импульсов определенной длительности, которая подается . на вход преобразователя 24 частота - аналог. На выходе последнего формируется аналоговый сигнал, величина которого зависит от количества импульсов, поданных на его вход, т.е. от количества срывов сцепле- иия колеса с рельсом в течение определенного промежутка времени. Если число срывов сцепления превышает определенное количество, то на йыхо- де преобразователя -24 частота - аналог вепичииа сигнала увеличивается настолько, что превышает величину уставки порогового элемента 21 и приводит к его срабатыванию. В ре-, зультате на вход а релейного элемента 6 поступает сигнал и на его выходе формируется максималыаШ по величине сигнал, который через за- датчик 7 интенсивности подается на один из,входов регулятора 3 тока и снижает задание на его входе до нуля Происходит полное снятие нагрузки с колесной пары. После восстановления сцепления колеса с рельсом на выходе порогового элемента 20 исчезает последовательность импульсов, что приводит к снижению выходного сигнала преобразователя 24 частота - аналог с некоторой постоянной времени, величину которой выбирают исходя из времени, необходимого для на
леса
8
дежного восстановления сцепления колеса с рельсом. При уменьшении сигнала на выходе преобразователя 24 частота - аналог ниже определенного значения происходит выключение порогового элемента 21 и снижение выходного сигнала релейного элемента 16 до нуля. Но уменьшение сигнала на выходе задатчика 7 интенсивности происходит с темпом, величина которого определяется интенсивностью, с которой .происходил последний из режимов боксования или юза колесной пары IIoJ9лe восстановления сцепления кос рельсом схема возвращается в исходное.положение.
Формула изобретения
1. Устройство для управления тяговым электроприводом электровоза, содержащее по числу тяговых двигателей индивидуальные вентильные преобразователи, блоки управления которы5
0
гуляторов тока якорей тяговых двигателей, соединенных одними из входов с выходами задатчика и соответствующих датчиков тока якорей тяго- п вых двигателей, а другими входами - с выходами задатчиков интенсивности боксования, которые одними из входов соединены с выходами релейных элементов, групповой вентильный преобразователь, с одним из выходов которого соединены одни из выводов якорей тяговых двигателей, подключен-, нык другими выводами к одним из выходов соответствующих индивидуальных вентильных преобразователей, другие выходы которьк соединены с другим выходом группового вентильного преобразователя, блок управления которым входом соединен с выходом блока выделения минимальной ЭДС тяговых двигателей, подключенного входом к выходам датчиков ЭДС тяговых двигателей, отличающееся тем, что, с целью увеличения реализуемой силы тяги, оно снабжено по числу тяговых двигателей формирователями сигналов, блоком вьщеления экстремальной частоты вращения колесных пар и соединенными с его входами датчиками частоты вращения колесных пар и задатчиком режима работы тяговых двигателей, причем одни из входов формирователей сигналов соединены с выходом блока выделения экстремаль5
0
5
ной частоты вращения колесных пар, другие входы с соответствующими датчиками частоты вращения колесных пар, одни из выходов - с одними из входов соответствующих релейных элементов и другими входами задатчиков интенсивности боксования, а другие выходы - с другими входами соответствующих релейных элементов.
2. Устройство по п. , о т л и - чающеес.я тем, что формирователь сигналов вьтолнен на блоках сравнения и памяти, пороговых элементах, управляемом ключе, дифференциаторе и преобразователе частота - аналог, выход последнего из которых соединен со входом одного из пороговых элементов, а вход - с одним из
ев-н-х о
29985010
выходов другого порогового элемента, к которому подключен один из входов управляемого ключа, соединенного выходом с блоком памяти, а дру5 гим входом - с выходом дифференциато- ра, вход которого и один из входов второго порогового элемента, соединены с выходом блока сравнения, один и-Другой, входы которого являются
Ш соответственно одним и другим входами формирователя сигналов, причем другой вход блока сравнения, объединен с входом другого порогового элемента, а выход блока памяти и выход
5 одного и другой выход другого порого- элементов .являются соответстёен- но одним и другими выходами формиро- вателя сигналов.
а
Фив. Z
Редактор Т.Митейко
Составитель Я.Гаврилов Техред А.Кравчук
Заказ 1106/17 Тираж 599 . Подписное ВНИИТШ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-г35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
Корректор М.Самборская
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулирования силы тяги и торможения электроподвижного состава при автоматическом управлении | 1981 |
|
SU1068305A1 |
| Устройство для автоматического управления электровозом | 1986 |
|
SU1402449A1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ОТ БОКСОВАНИЯ И ЮЗА КОЛЕСНЫХ ПАР ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 1991 |
|
RU2025310C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ ЭЛЕКТРОВОЗА ПЕРЕМЕННОГО ТОКА | 1990 |
|
RU2013231C1 |
| Устройство для регулирования силы тяги и торможения электроподвижного состава при автоматическом управлении | 2019 |
|
RU2739552C1 |
| Устройство для регулирования скорости электроподвижного состава | 1988 |
|
SU1564014A1 |
| Устройство автоматического управления скоростью движения рудничного электровоза | 1977 |
|
SU929473A1 |
| Устройство для автоматического управления электроподвижным составом | 1977 |
|
SU716888A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ СИЛЫ ТЯГИ ЭЛЕКТРОТРАНСПОРТНОГО СРЕДСТВА | 1990 |
|
RU2013232C1 |
| Устройство автоматического управления скоростью движения рудничного электровоза | 1979 |
|
SU1004168A1 |
Изобретение относится к автоматике и может быть использовано для управления тяговым электроприводом электровоза переменного тока с двигателями независимого возбуждения. Цель изобретения - повышение надежности. Устройство содержит по числу тяговых двигателей цепи последова- . тельно соединенных регуляторов тока, блок импульсно-фазового управления at с (Л Фи.1
| Инструмент для фиксации вывороченного века | 1938 |
|
SU58396A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
