тЛ
as
11
Изобретение относится к железнодорожному транспорту и предназначено |для автоматического управления тяговым электроприводом электроподвижного состава.
Цель изобретения - повьшение надежности и реализациия предельных тягово-тормозных усилий.
На чертеже представлена блок-схема устройства для осуществления способа.
: Устройство для регулирования сил |тяги и торможения электро подвижно го ростава содержит тиристорные преоб- разоватепи 1 и 2, к которым подключены тяговые двигатели 3-6, связан - кые с колесными парами 7-10. Входы иристорных преобразователей 1 и 2 соединены с выходами регуляторов то- ka (сил тяги и торможения) тяговых |цвигателей в режиме тяги 1 1 и тормо- кения 12. Индивидуальные датчики 13-16 частоты вращения тяговых двигателей 3-6 подключены на входы блоков выделения минимальной 17 и максимальной 18 частоты вращения тяговых двигателей. Выход блока 17 выделения минимальной частоты соединен с входом блока 19 сравнения, выделяющего разность между минимальной частотой вращения тяговых двигателей всего электровоза и частотэй вращения тягового двигателя данной оси и на вход масштабного преобразователя 20. Вы-- ход блока 18 выделения максимальной частоты соединен с входом блока 21 сравнения, выделяющего разность между максимальной частотой тяговых двигателей всего электровоза и частотой вращения тягового двигателя данной оси и на вход масштабного преобразователя 22. Выходы блоков 19, 20 и 21J, 22 включены ,на один из входов пороговых элементов 23 и 24, на другие входы которых подключены потенциометры 25 и 26. Выходы блоков 23 и 24 включены на один из входов трехканальных функциональных преобразователей 27 и 28, образующих на выходах сигналы, обратно пропорциональные входным сигналом. Выходы блоков 27 и 28 соединены с входами логических блоков 29 и 30, непрерьш- но выделяющих соответственно минимальный и максимальньш из поступающих на их входы сигналов.
На другие входы блоков 29 и 30 подключены выходы регуляторов скоро
16346,2
ти в тяге 31 ив режиме торможения 32, а также задатчики 33 и 34 тока. Выходы блоков 29 и 30 подключены на входы регуляторов 11 и 12 тока, на другие входы которых подключены входы ограничителей 35 и 36 минимального уровня тока, входы которых подключены на выходы регуляторов 11 и
12.
Входы регуляторов скорости движения в тяге 31 ив режиме торможения 32 подключены к задатчику 37 скорости. Выходы блоков 17 и 18 соединены
соответственно с входами дифференцирующих блоков 38 и 39, подключенных выходами к входам дифференцирующих блоков 40 и 41 и к входам блоков 42, 43 и 44, 45 сравнения. При этом выходы дифференцирующего блока 41 соединены с одним из входов блоков 46 и 47 сравнения, к другим входам которых подключены соответственно задатчики 48 и 49. Выходы дифференцирующего блока 40 соединены с одним из входов блоков 50 и 51 сравнения, к другим входам которых подключены задатчики 52 и 53. Устройство снабжено задатчиками 54-58, элементом 59
сравнения, исполнительным органом 60 пескоподачи с клапанами 61-64. Способ осуществляют следующим образом.
В регуляторах 31 и 32 скорости тока (силы тяги и торможения 11 и 12) сравнивают заданные и истинные значения соответствующих параметров. Разностью между заданными и фактическими достигнутыми значениями регулируемых параметров, усиленной и преобразованной, воздействуют на величину угла открытия тиристоров преобра-- зователей 1 и 2.
В зависимости от угла открытия тиристоров преобразователей регули-- руют силу тяги и торможения электровоза.
При медленно развивающемся буксовании (или юзе) одной или нескольких колесных пар разность между минимальной частотой вращения тяговых двигателей, которой пропорциональна скорость электроподвижного состава в режиме тяги, и частотой вращения буксующей колесной пары (или между максимальной частотой вращения тяговых двигателей, которой пропорциональна скорость электроподвижного состава в режиме торможения, и частотой вра314
щения юзующей колесной пары возрастает пропорционально глубине буксования (или юза). Следовательно, величины сигналов на выходах блоков соответственно 19 и 21, выделяющих разности указанных частот, растут пропорционально глубине буксования или юза.
Как только величина разности час- тот вращения колесных пар превысит пороговое значение, заданное потенциометром 58 в блоке 59 сравнения, на его выходе появляется сигнал, который через исполнительный блок 60 включает клапаны подачи песка под колесные пары электровоза. Пороговые значения, задаваемые потенциометрами 25 и 26 элементов 23 и 24 сравнения, вьше, чем элемента сравнения 59, по-- этому сигналы на выходе блоков 23 и 24 отсутствуют.
Если буксование (или юз) удалось устранить за счет подачи песка, то сигнал на выходе блоков 19 и 21 уменьшается, становится ниже порогового значения, сигнал с выхода блока 59 сравнения отсутствует и подача песка прекращается.
Если же буксование (или юз) не прекратилось и разность частот вращения колесных пар продолжает нарас-- тать, то продолжают расти и выходные сигналы блоков 19 и 21, Как только величины этих сигналов превысят пороговые значения, заданные потенциометрами 25 и 26 в блоках 23 и 24 сравнения, то на их выходах появляются сигналы, которые подаются на входы функциональных преобразователей 27 и 28. На выходах же функциональных преобразователей 27 и 28 сигналы по величине уменьшаются пропорционально, соответственно, глубине буксования или юза, так как эти блоки выделяют сигналы обратно пропорциональные выходным сигналам бло- ков 23 и 24. Выходные сигналы блоков 27 и 28, обратно пропорциональные глубине буксования или юза, поступают на входы соответственно блоков 29 и 30, непрерьшно выделяющих минимальный из входных сигналов, который и становится заданным значением регуляторов тока 11 (силы тяги) и 12 (тормозной силы). В процессе развития буксования или юза выходные сигналы блоков 27 и 28 уменьшаются и, становясь с некоторого момента мень346
ше других входных сигналов блоков 29 и 30, определяют уставки соответствующих регуляторов, что приводит к уменьшению токов буксирующего или юзующего двигателя на величину, пропорциональную глубине буксования (или юза) и к прекращению самого процесса буксования (или юза). Быст0 рейшему прекращению буксования или юза способствует и подача песка под колесные пары, которая продолжается одновременно со снижением тока буксующего (юзующего) двигателя.
5 Для реализации предельных по условиям сцепления сил тяги и торможения порог срабатывания элементов 23 и 24 сравнения непрерьшно корректир тот путем подачи на их входы сигналов с
0 выходов масштабных преобразователей 20 и 22. На входы масштабных преобразователей 20 и 22 подаются сигналы, пропорциональные соответственно минимальной (в тяге) и максимальной
5 (прл торможении) скоростям движения. Эти сигналы хеньшаются в определенном масштабе в блоках 20 и 22 и, суммируясь с сигналами, задаваемыми потенциометрами 25 и 26, увеличгаают
0 порог срабатывания элементов 23 и 24 сравнения. Таким образом, с ростом скорости двкжения порог срабатг--ша- ния элементов 23 и 24 растет, следовательно увеличивается допустимое проскальзьшание колеса относительно рельса, способствуя реализации максимального коэффициента сцепления.
В случае медленно развивающегося одновременного буксования (или юза)
Q всех колесных пар электровоза по разности частот вращения колесных пар не удается определить начавшееся буксование или юз. В таком случае в режиме тяги с блока 18 берется сигд нал с наиболее быстро вращающейся колесной пары,- в блоке 39 сигнал преобразуется в аналоговую форму и дифференцируется. Сигнал с выхода блока 39 поступает на блоки 44 и 45
сравнения, где сравнивается с допустимыми величинами ускорений. Уставка задатчика 54 устанавливается ниже, чем уставка задатчика 55, но вьше, чем допустимое рабочее ускорение
5
55
осей при трогании и разгоне поезда или одиночного электровоза. Если же ускорение осей превышает уставку,, это свидетельствует о развитии буксования всех осей. На выходе блока
5
44 появляется сигнал, который поступает в исполнительный блок 60 и выдается команда на подачу песка под коле сные пары.
Если с помощью пескоподачи не уда- ;ется ликвидировать буксование и уско- :рение колесных пар возрастает формируется сигнал на выходе- блока 45 срав
14
-- в
14163466
ке 47 сравнения и на его выходе появляется сигнал, преобразующийся и блоке 27 в величину, обратно пропорциональную, и как только этот сигнал окажется меньше других входных сигналов логического блока 29, срабатывает . регулятор 11. на снижение тягового тока. Одновременно идет подсыпка пес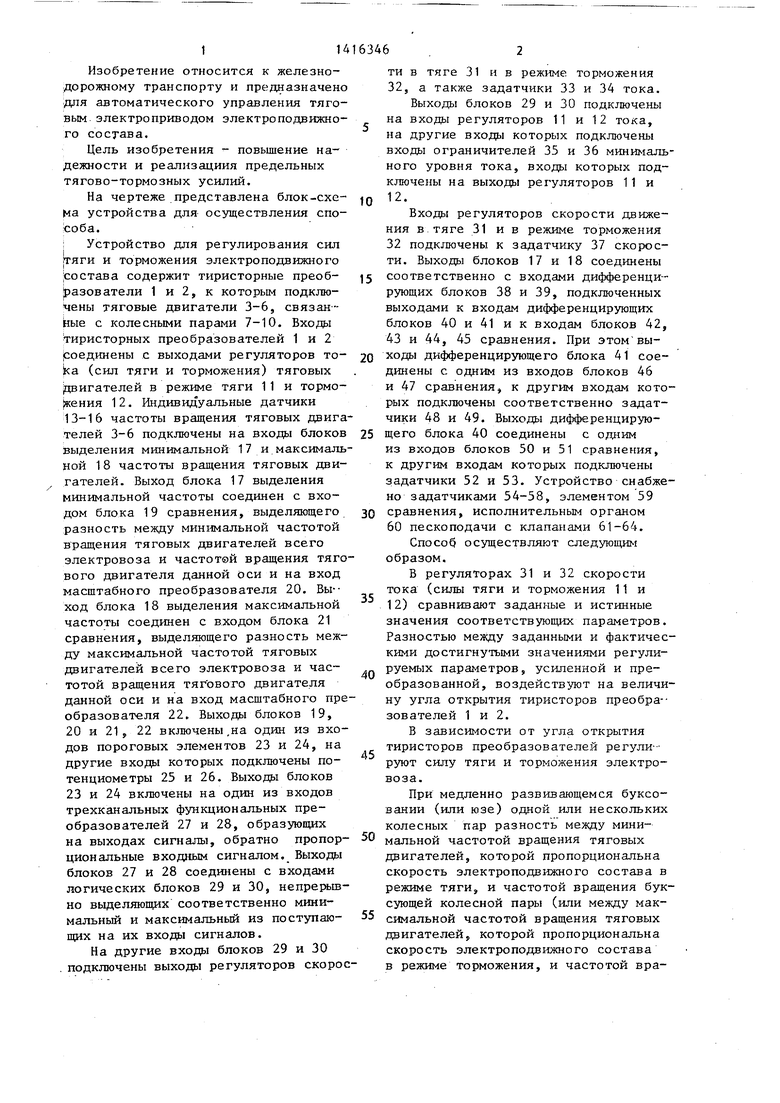

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулирования силы тяги и торможения электроподвижного состава при автоматическом управлении | 1981 |
|
SU1068305A1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ОТ БОКСОВАНИЯ И ЮЗА КОЛЕСНЫХ ПАР ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 1991 |
|
RU2025310C1 |
| Устройство для регулирования силы тяги и торможения электроподвижного состава при автоматическом управлении | 2019 |
|
RU2739552C1 |
| Устройство для защиты от буксования и юза колесных пар электровоза | 1987 |
|
SU1438976A1 |
| Способ регулирования силы тяги и торможения электроподвижного состава при автоматическом управлении | 1977 |
|
SU747747A1 |
| Устройство для регулирования частоты вращения тяговых двигателей электроподвижного состава | 1980 |
|
SU956326A1 |
| Устройство для управления тяговым электроприводом электровоза | 1985 |
|
SU1299850A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ НАГРУЗКИ ТЯГОВЫХ ДВИГАТЕЛЕЙ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 1990 |
|
RU2034721C1 |
| Устройство для автоматического управления электровозом | 1986 |
|
SU1402449A1 |
| Устройство для регулирования скорости электроподвижного состава | 1988 |
|
SU1564014A1 |
Изобретение относится к железно- дорожтсому транспорту и предназначено для автоматического управления тяговым электроприводом электроподвижного состава. Цель изобретения - повышение надежности и реализация предельных тягово-тормозных усилий. Способ регулирования сил тяги и торможения электроподвижного состава заключается в том, что сигнал, пропорциональный скорости злектроподьижного состава и выделяемый в блоках 17 и 18, сравнивают в блоках 19 и 21 сравнения с сигналами, пропорциональными частоте вращения каждого из двлгате-; лей 3-6. Разностные сигналы сравнивают в пороговых элементах 23, 24 с уровнями, пропорциональными допустимы скоростям проскальзывания колесной пары относительно рельса, которые корректируют в функции скорости электроподвижного состава, используя масштабные преобразователи 20, 22. Изменения сил тяги и торможение осуществляют до задаг1ных минимальных величин за счет подключения к регуляторам 11, 12 тока ограничителей 35, 36 м ши1чального уровня тока. 1 ил. Ж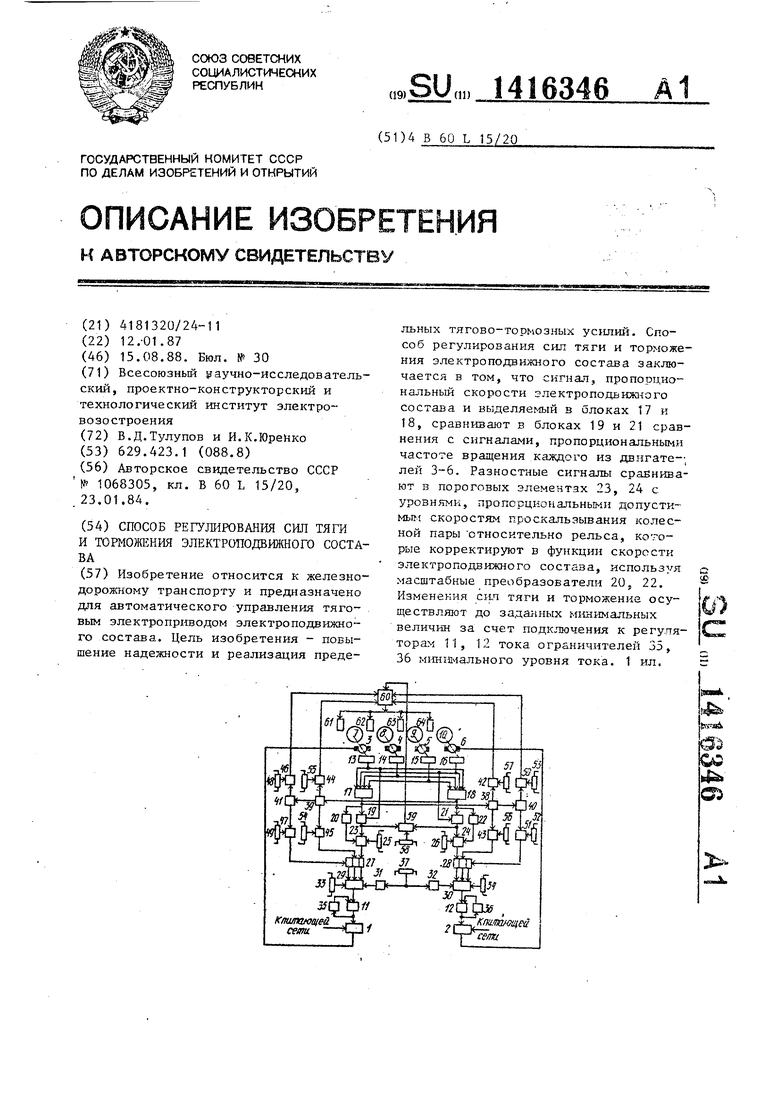
ликвидируется в начальной стадии развития.
Для режима торможения при внезапно развивающемся юзе сигнал замедлененияз которьм подается в шункциональ- р ка под колесные пары и буксование
ньш преобразователь 27,, преобразуетх;я в з.аличину; обратно про порцион аль;ную входной величинв j и поступает на
;вход логического блока 29, Как толь:ко этот сигнал окажется меньше ocTanb--jt; ния самой медленно вращающейся оси с
выхода блока Г/ дифференцируется в блоке 38, затем вторично дифференцируется в блоке 40 и сравнивается в бхгоке 50 с пороговьп4 значением, при 2Q наличии рассогласования происходит . включение пескоподачи, или же сигнал с блока 51 сравнения через блок 28, логический блок 30 и регулятор 12 осует,ествляет кратковременное сниже- 25 ние тормозного усилия и ликвидацию юза.
Во всех режимах буксования и юза сигнал с выхода регуляторов 11 н 12 через ограничители 35 и 36 миним аль- -,; кого уровня тока подается на вход регуляторов 11 и iZy ограничивая ток (силу тяги и торможения) на опреде-- ленном минимальном уровнеj, обеспечивая пo щepжaниe состава в растянутом (в тяге) и в сжатом (при торможении) состояниях. Этим самым исключаются отри1;ательные реакции в автосцепках поезда. Минимальный уровень силы тяги и торможения зависит от мощнос- TPI электровоза и от веса состава и находится в пределах 2-10 т.
Таким образом, происходит непрерывное слежение по комплексу показателей за состоянием сцепления колесных пар с рельсамир производится автоматическая кратковременная подача песка в случаях местного ухуд1пения сцепления или автоматический выбор такой уставки регуляторов тока, чтобы обеспечить регулирование сил тяги и торможения на пределе по сцеплению.
|ных входных сигналов этого блока,, про- исходит снижение тягового тока на ;величину5 пропорциональную глз бине ;буксовзлия.
В аналогичных случаях для режима :торможения при юзе всех осей с блока :17 поступает сигнал о мини -1альной ;частоте вращения колесных пар кото- |рьш поступает в дифференцирующий блок ЗВ., с выхода которого сигнал подает- |ся на блоки 42 я 43 сралзненияр если г этот сигнал превьшает пороговое зна- чение заданное задатчиком 57, то :поступает сигнал в исполнитешл-гый ,: ;блок 60 для включения клапанов подсыпки песка Если жв превыздекс пороговое значение„ заданное задатчиком :56, то сигнал с блока 43 поступает в функциональный преобразователь 285 тфеобразуется в величину, обратно :пропордионалъную входной 5 и далее логическш- блоком 30 выдается команда регулятору (2 на сншкение тормозной сялЫ:, Одловременно продолжаатся подсыпка песка под колесные пары
В слз чае вггезапно разв11ва ю1цегося буксования (юз а) одной i-ши всех колесных пар регулирование происходит следз/ющ -1м о бравом Для реяюла .ояги сигнал об ускорении наиболее быстро вращающейся оси с -выхода блока 39 поступает в блек k , где еще раз дифференцируется к подается в блоки 46 и 47 сравнення.5 где сравнивается с допустЩ 1ЬЦ--1И пороговььми значениями, дада-ваемыми задатчика1чи 48 и 49.
При внезапно развивающемся б-узссовании производная от ускорение пре- BbffijaeT пороговое значение и на выходе блока 46 формируется сигнал иду-щий на вкл очеиие клапана подачи песка под колес11Ы пары. При дальнейшем росте сигнала на выходе блока 41 превышается пороговое зна 1екке в бхю-35
40
Ф О р м у л а изо
р е т е н и я
Способ регзширования сил тяги и торможения злектроподвижного состава, СОСТО.ЩИЙ в ТОМ; что непрерьшно выделяют и сравнившот сигналы, про пор- ыиона,гшные скоростям электроподвилшоликвидируется в начальной стадии развития.
Для режима торможения при внезапно развивающемся юзе сигнал замедлеФ О р м у л а изо
р е т е н и я
Способ регзширования сил тяги и торможения злектроподвижного состава, СОСТО.ЩИЙ в ТОМ; что непрерьшно выделяют и сравнившот сигналы, про пор- ыиона,гшные скоростям электроподвилшого состава и каждого тягового двигателя формируют сигнал ограничения сил тяги и торможения, величина которого обратно пропорциональна разности скоростей электроподвижного состава и каждого тягового двигателя, сравнивают его с сигналом, пропорциональным заданному значению сил тяги и торможения, и в функции минимального из сравниваемых сигналов изменяют силы тяги и торможения, отличающийся тем, что, с целью повышения надежности и реализации предельных тягово-тормозных усилий, сиг-нал, пропорциональный разности скоро
стей электроподвиж1 ого состава и каждого тягового дэигателя, сравнивают с сигналом, пропорциональным допустимой скорости проскальзьшания колесной пары относительно рельса, и при превьшении этого, сигнала формируют сигнал ограничения сил тяги и жения, причем сигнал, пропорциональный допустимой скорости проскальзывания колесной пары относительно рельса, корректируют в функции скорости электроподвижного состава, а изменению сил тяги и торможения осуществляют до заданных минимальных величин.
| Способ регулирования силы тяги и торможения электроподвижного состава при автоматическом управлении | 1981 |
|
SU1068305A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
