Изобретение относится к области манипуляторостроения и может быть использовано при создании систем управления манипуляторами.5
Известны системы управления суставом очувствленного манипулятора.
Система l , содержащая датчики положения задающего и исполнительного органов, датчики скорости задаю- ю щего и исполнительного органов,сумматоры, усилители и приводы задающего и исполнительного органов, имеет невысокую точность передачи положения и низкое быстродействие. jj
Наиболее близким техническим решениём к данному изобретению является система 2 , содержащая последовательно соединенные датчик положения задающего органа, первый масштаб-2о усилитель, первый блок коррекции и привод задающего органа, последовательно соединенные датчик положения исполнительного органа, второй масштабный усилитель, второй сумма- 25 тор, второй блок коррекции и привод исполнительного органа, последовательно соединенные датчик скорости зещающего Ьргана, третий масштабный усилитель и третий сумматор, выход JQ
CTg«JH ;rL№l jnyJ M3(Jll -; :E Ka; iiS 4if «f«4pK.- ,,.:
...
которого подключен ко второму входу первого блока коррекции, последбвате.пьно соединенные датчик скорости исполнительного органа, четвертый масштабный усилитель и четвертый сумматор, второй вход которого подключен ко второму выходу третьего масштабного усилителя, а выход - ко второму входу второго .блока коррекции, второй выход первого масштабного усилителя соединен со вторым входом второго сумматора, второй выход второго масштабного усилителя подключен ко .второму входу первого-.сумматора, а второй выход четвертого масштабного усилителя соединен со вторым входом третьего сумматора.
Недостатком такой системы является то, что она не обеспечивает одновременно хорошую точность по обоим каналам (положений и усилий) и хорошие УСТОЙЧИВОСТЬ и качество всей системы.,
Целью изобретения яйляется улучшение динамических характеристик системы.
Сущность изобретениязаключается в том, что система содержит последовательно соединенные датчик ускоре ГХ .i--i -a5i;S -i Ssi S S..
ИИ задающего органа, пятый масштабый усилитель и пятый сумматор, поледовательно соединенные датчик усорений исполнительного органа,шесой масштабный усилитель и шестой умматор, последовательно соединенные датчик момента задающего органа, едьмой масштабный усилитель и седьой сумматор, последовательно соединенные датчик момента исполнительноо органа,восьмой масштабный усилитель и восьмой сумматор, второй вход которого подключен ко второму заходу седьмого масштабного усилителя, а выход - к третьему входу второго блока коррекции, второй вход пятого сумматора соединен со вторым выходом шестого масштабного усилителя, а вы5соЬ. с третьим входом первого блока коррекции, второй вход шестого сумматора подключен ко второму выходу пятого масштабного усилителя, а выход - к четвертому входу второго блока коррекции, второй вход седьмого сумматора соединен со вторым выходом восьмого масштабного усилителя, а выход - с четвертым входом первого блока коррекции.
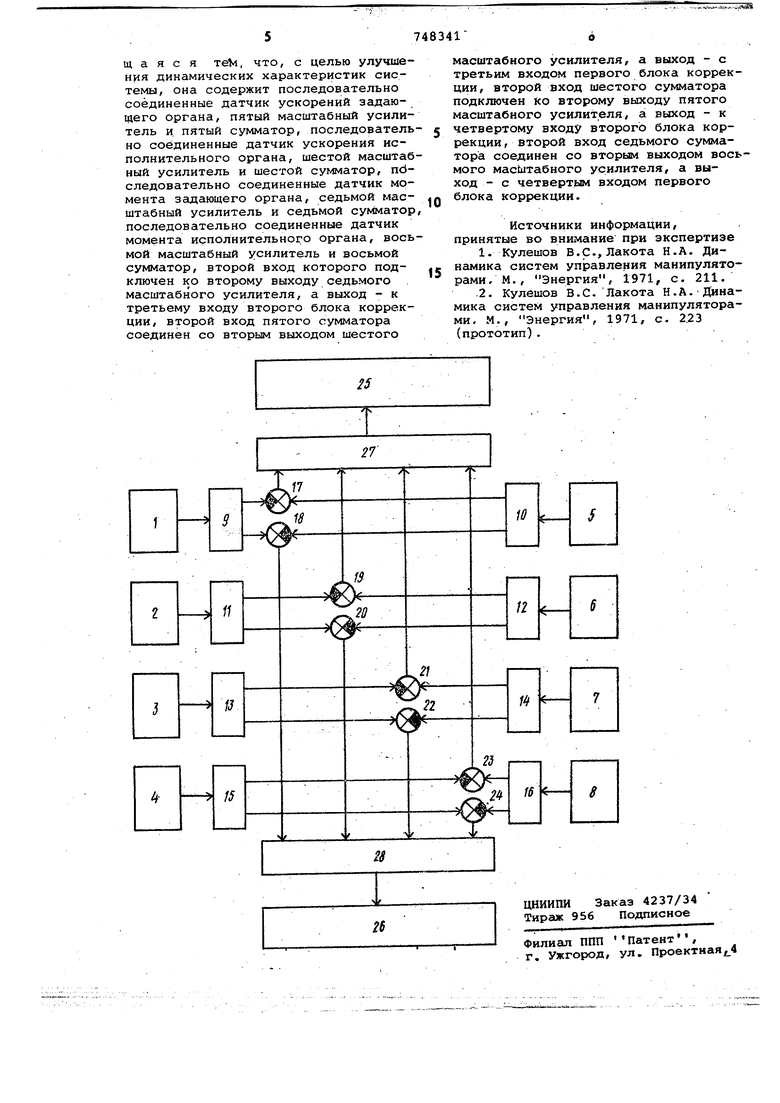
На чертеже представлена функциональная схема системы, на которой указаны: 1 - датчик положения задающего органа, 2 - датчик скорости задающего органа, 3 - датчик ускорения задающего органа, 4 - датчик момента задающего органа, 5 - датчик положения положительного органа, б - датчик скорости исполнительного органа, 7 - датчик ускорения исполнительного органа, 8 - датчик момента исполнител ного органа, 9, 10, 11, 12, 13, 14, 15, 16 - первый, второй,третий/ четвертый, .пятый, шестой,седьмой И восьмой масштабные усилители соответственно, 17, 18, 19, 20, 21,
22, 23, 24 - первой, второй, третий, четвертый, пятый, шестой, седьмой.и восьмой сумматоры соответственно, 25 - привод задающего органа, 26 привод исполнительного органа, 27 первый блок коррекции, 28 - второй блок коррекций.
Система работает следующим образом. , .
Усилие оператора, активное или реактивное, изменяет равнодействующие- силы и моменты, действующие на . звенья задающего органа, в результате чего изменяются их взаимные положения скорости, ускорения, которые изгтеряются соответствующими датчиками 9, 10, 11. Момент в суставе задающего органа измеряется датчиком 4. Усилие нагрузки, активное или реактивное, изменяет равнодействующие силы и моменты, действующие на звенья истюлнительного Органа, и результате чего изменяются их относительяле положения, скорости, ускорения, которые измеряются соответствуюп1Ш 1И ь:зтиками 5, 6, 7. Момент в суставе исполнительного органа измеряется датиком 8. Сигналы датчиков 1-8 поступают на входы масштабных усилителей 9-16, преобразуются в два сигнала один для задающего органа, другой ля исполнительного органа, каждый
из которых преобразуется в соответствующую форму, умножается на масштабно-весовой коэффициент, корректируется и подается с соответствующих выходов масштабных усилителей 9.-16 на
сумматоры 17-24. Преобразованные и
скорректированные сигналы одноименных датчиков 1-8 задающего и исполнительного органов, выходящие с одноименных выходов масштабных усилителеки 9-16, сравниваются между собой в сумматорах 17-24, разности сигналов поступают на входы блоков коррекции 27, 28, с выходов блоков
коррекции 27, 28 поступают на входы приводов 25, 26, которые отрабатывают эти сигналы, создавая на своих выходах-соответствующие моменты,ускорения, скорости и положения звеньSSПрименение изобретения позволит
эа счет наличия обратных связей по положению, скорости, по ускореникз и моменту повысить статическую и динамическу р точность системы управления манипулятором.
Формула изобретения
Система управЛения суставом очувствленного манипулятора, содержащая последовательно соединенные датчик положения задающего органа, первый масштабный усилитель, первый сумматор,первый блок коррекции и привод задающего органа, последовательно соединенные датчик положения исполнительного органа, второй масштабный усилитель, второй сумматор, второй
блок коррекции .и привод исполнительного органа, последовательно соединенные датчик скорости задающего органа, третий масштабный усилитель и третий сумматор, выход которого подКЛЮЧеН ко второму входу первого 1ЛОка коррекц-ии, последовательно соеди.ненные датчик скорости исполнительного органа, четвертый масштабный усилитель и Четвертый сурлматор,второй вход которого.подключен ко второму выходу третьего масштабного
усилителя, а выход - ко второму входу второго блока коррекции, второй выход первого масштабного усилителя соединен со бторым входом второго
сумматора, второй выход второго масштабного усилителя подключен ко второму входу первого сумматора, а второй выход четвертого масштабного усилителя соединен со вторым .входом i
третьего сумматора, отличаю
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД РОБОТА | 2010 |
|
RU2434736C1 |
| Устройство для управления приводом робота | 1990 |
|
SU1781027A1 |
| ЭЛЕКТРОПРИВОД РОБОТА | 2009 |
|
RU2398672C1 |
| ЭЛЕКТРОПРИВОД РОБОТА | 2010 |
|
RU2424894C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 1994 |
|
RU2066626C1 |
| ЭЛЕКТРОПРИВОД РОБОТА | 2009 |
|
RU2398671C1 |
| ЭЛЕКТРОПРИВОД РОБОТА | 2009 |
|
RU2425746C2 |
| Устройство для управления манипулятором | 1983 |
|
SU1166054A1 |
| ЭЛЕКТРОПРИВОД РОБОТА | 2012 |
|
RU2489250C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД РОБОТА | 2002 |
|
RU2208242C1 |
