(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ БУРОВЫМ СТАНКОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления буровым станком | 1984 |
|
SU1157213A1 |
| Устройство для управления буровым станком | 1986 |
|
SU1381427A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРОЦЕССОМ БУРЕНИЯ | 1992 |
|
RU2067170C1 |
| Устройство для управления режимами вращательного бурения | 1981 |
|
SU1030543A1 |
| Устройство для управления режимами вращательного бурения скважин | 1977 |
|
SU903564A1 |
| Устройство для каротажа скважин в процессе бурения | 1977 |
|
SU737902A1 |
| Устройство управления буровым насосом | 1982 |
|
SU1027377A1 |
| Устройство для управления установкой измельчения угля | 1990 |
|
SU1795420A1 |
| Приемопередающее телеграфное устройство | 1989 |
|
SU1783633A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ГОРИЗОНТИРОВАНИЯ НЕСУЩЕЙ ПЛАТФОРМЫ С БУРОВЫМ АГРЕГАТОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2196893C1 |
I
Изобретение относится к автоматическому управлению процессом бурения. Оно может быть применено на сушествующих буровых станках для бурения взрывных скважии шарошечными долотами на открытых карьерах.
Известно устройство для автоматического подцержания параметров бурения буровых станков
Данное устройство рассчитано на поддержание параметров бурения в определенных .границах по величине скорости проходки Hto другому параметру и не обеспечивают автоматизацию вспомогательных операций. 15
Известно устройство для программного управления рабочим органом станка, которое позволяет осуществить автоматизацию ,вспомогательных операций. Оно содержит 20 блок сигнализации, блок задания режима, первый ключевой элемент, блок обратной связи, элемент И, элемент ИЛИ, первый элемент задержки, элемент НЕ, блок кор-
рекциИ|первый и второй блоки приводов и блок памяти 2
Известное устройство не может быть применено на буровом станке и имеет недостаточное быстродействие.
Цель изобретения - повышение быстродействия устройства.
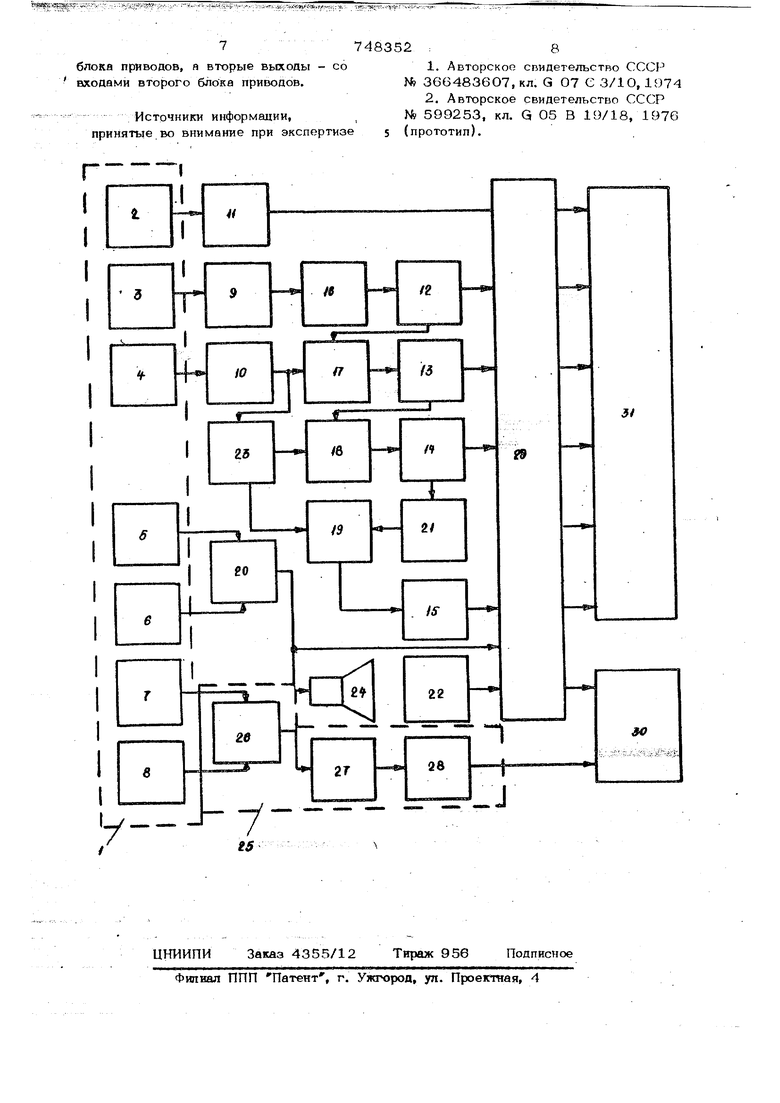
Поставленная цель достигается тем, что в устройство введены четыре ключевых элемента, второй и третий элементы задержки, два пороговых элемента и дешифратор, при этом первый выход блока обратной связи через первый ключевой элемент соединен с первым входом дешифратора, второй выход чсроз последовательно соединенные перЕлый пороговый элемент, первый элемент задержки и второй ключевой элемент - со пторым входом дешифратора и с первым входом второго элемента задержки, третий выход через последовательно соединенные второй пороговый элемент, второй элемент задержки и третий ключевой элемент - с т;№тьим входом дешифратора и первым входом третьего 74 элемента задержки, второй вход которого через элемент НЕ соединен с выходом вто рого порогового элемента, а выход через четвертый ключевой элемент - с четвертым входом дешифратора и входом блока памяти, выход которого соединен с первым входом элемента И, подключенного вторым входом ко второму выходу элемента НЕ, а вбпсодом через пятый ключевой элементк пятому входу дешифратора, шестой вход которого подключен к входу блока сигнализации и выходу элемента ИЛИ, соединенного с первым и вторым входами соответственно, с четвертым и пятым выходами блока обратной связ;., седьмой вход дешифратора соединен с выходом блока за дания режима, первые выходы дешифратора - со входами первого блока приводов, а вторые выходы - со входами второго блока приводов. На чертеже показана блок-схема устройства для управления буровым станком, Устройство содержит блок 1 обратной связи, куда входят датчик 2 горизонтирования, датчик 3 тока двигателя-вращателя (1 привод) пневматический датчик 4 зашламовывания долота, датчики 5 и 6; верхнего и низшего положения штанг, а также датчики 7 и 8 горизонтальной и верт 1кальной вибрации. Устройство также содержит первый и второй пороговые элементы 9 и 10 соответственно, первый 11 второй 12, третий 13, четвертый 14 и пятый 15 ключевые элементы. Первый 16 второй 17 и третий 18 элементы задержки, элемент И 19, элемент ИЛИ 2О, блок 21 памяти, блок 22 коррекции, элемент НЕ 23, блок 24 сигнализации, блок 25 задания режимов, который состоит из сум матора 26, интегратора 27 и схемы регулирования 28, дешифратор 29, первый п второй блоки приводов 30 и 31 соотве ственно. Основные принципы работы устройства: работая по мягким иди твердьхм породам, задается начальный режим бурения по давлению блоком 18j автоматически устанавливается максимально возможное для данной породы давление и скорость вращения буровой штанги в случаях зашламовывания долота, либо при большом по1реблении тока двигате лем вращателя происходит медленный подъ ем долота при сниженных оборотах, если причина не устраняется, происходит быстрый подъем долота. В случае исключения причин, вызвавших подъем долота, проис24ходит опускание долота и продолжается процесс бурения5 при возникновении вибрации, превышающей установленный допустимый уровень, подается сигнал уменьшения скорости вращения на тиристорный привод и после уменьшения вибрации до допустимого уровня устанавливается рабочий режим| горизонтирование бурового станка на месте бурения будущей скважины происходит также автоматически} при достижении опорным узлом крайнего верхнего или нижнего положения происходит выключение двигателя станка. Устройство работает следующим образом. При остановке станка на месте будущей скважины происходит автоматическое горизонтирование станка путем отработки сигналов, поступающих с датчика 2 горизонтирования через первый ключевой элемент 11 и дешифратор 29, управляклцкм Двигателями домкратов во втором блоке 31 приводов. После достижения станком горизонтального положения дешифратор 29 обеспечивает перевод станка на режим бурения. В процессе бурения устройством автоматически устанавливается максимально возможное для данной породы осевое усилие на долото и скорость вращения буровой штанги блоком коррекции 22 и блоком задания режимов тиристорного привода 25. При превышении током .потребления установленного уровня сигнал с датчика тока 3 через первый пороговый элемент 9, элеме нт 16 задержки и первый ключ 12 подается на дешифратор 29, который вырабатывает сигнал на уменьшение осевого уси- Если это не исключает превьпиение тока, то через время, определяемое вторым элементом 17 задержки, через ключевой сигнал 13 О превышении тока потребления подается на другой вход дешифратора, который обеспечивает управление двигателем подъема во втором блоке 31 приводов (происходит медленнътй подъем) и одновременно подается сигнал на тиристорнъ1й привод для уменьшения скорости вращения долота. Элемент 16 задержки служит для исключения срабатывания устройства на уменьшение осевого усилия при кратковременном превышении величины тока потребления допустимого значения. Режим медленйого подъема рассчитан на небольшой подъем долота и время подъема определяется третьим элементом за,держки 18, и если сигнал с датчика тока не установился в рамках допустимого зна чения, срабатывает ключевой элемент 14 и подается сигнал, который обеспечивает режим подъема (происходит быстрый подъ ем). Время, в течение которого происходит быстрый подъем, запоминается блоком 21 памяти и в случае отсутствия сигнала о превышении тока и превышении давления в воздушной магистрали, приходящего с пневматического датчика 4, на выходе эле мента И 19 вырабатывается сигнал, который через пятый ключевой элемент подается на дешифратор, который, в свою очередь, обеспечивает режим опускания долота. Происходит быстрый спуск в течение времени, равного быстрому подъему и ЕЮ- зобновляется бурение. Сигнал с пневматического датчика 4 через пороговый элемент 1О подается так же на второй элемент 17 задержки. Далее этот сигнал используется таКже, как и сигнал о превышении тока, но независимо от второго, для установления медленно го и быстрого подъема. Датчики положения опорного узла располагаются наверху и внизу буровой мачтъ1 и служат для контроля нижнего и верх него крайних положений опорного узла бурового станка. Схема ИЛИ 20 пропускает сигналы с датчика 5 либо с датчика 6 на деши4ч атор 29, который, в свою очередь, вырабатывает команду на выключение двигателя врашателя и всех остальнък двигателей бурового станка, при этом срабатывает звуковая сигнализация 24, кото рая вызывает машиниста для участия в управлении станком. Канал ограничения вибраций работает .следующим образом. С двух датчиков горизонтальных 7 и вертикальнъгх 8 колебаний сигналы суммируются в сумматоре 26 и обрабатываются интегратором 27 с целью усреднения и выделения низкочастотнък составляющих Схема регулировки тиристорного привода 28 . вырабатывает управляющее напряжение, которое уменьшает число оборотов двигателя врашателя, в случае, если суммарный и усредненный низкочастотнъ1Й сиг ,нал колебаний бурового станка превышает по величине установленное допустимое зна чение. При выходе бурового станка из режима сильнък вибраций поддерживается максимально возможная скорость вращения долота, при которой уровень вибраций яе выходит за допустимое значение. Устройство управления буровым станком обеспечивает автоматический режим бурения по критерию максимальной производительности и автоматизацию всех вспомогательнътх операций, кроме переезда бурового станка и наращивания штанг. С момента прибытия станка на место бурения и до забуривания на глубину,которую обеспечивает .буровая штанга, станок работает без вмешательства человека. о р мула изобретения Устройство для управления буровым станком, содержащее блок сигнализации, блок задания режима, первый ключевой элемент, блок обратной связи, элемент И, элемент ИЛИ, первьтй элемент задержки, элемент НЕ, блок коррекции, первый и второй блоки приводов и блок памяти, отличающееся тем, что, с целью повышения быстроДейств.ия устройства, в него введены четыре ключевых элемента, второй и третий элементы задержки, два пороговых элемента и дешифратор, причем первый выход блока обратной связи через первый ключевой элемент соединен с первым входом дешифратора, второй выход через последовательно соединенные пер-вый пороговый элемент, первый элемент задержки и второй ключевой элемент - со вторым входом дешифратора и с первым входом второго элемента задержки,третий выход через последовательно соединеннъге второй пороговый элемент, второй элемент задержки и третий ключевой элемент - , с третьим входом дешифратора и первым входом третьего элемента задержки, второй вход которого через элемент НЕ соединен с выходом второго порогового элемента, а выход через четвертый ключевой элемент - с четвертым входом дешифратора и входом блока памяти, выход которого соединен с первым входом элемента И, подключенного вторъгм входом ко второму выходу элемента НЕ, а выходом через пятый ключевой элемент - к пятому входу дешифратора, шестой вход которого подключен к входу блока сигнализации и выходу элемента ИЛИ, соединенного первым и торым входами соответственно с четвертым и пятым вькодами блока обратной свяи, седьмой вход дешифратора соединен выходом блока задания режима, первые ыходы дешифратора - со входами первого
блока приводов, а вторые вьсходы - со входами второго блока приводов.
Источники информации, принятые во внимание при экспертизе
г
у
УfS
(прототип).
