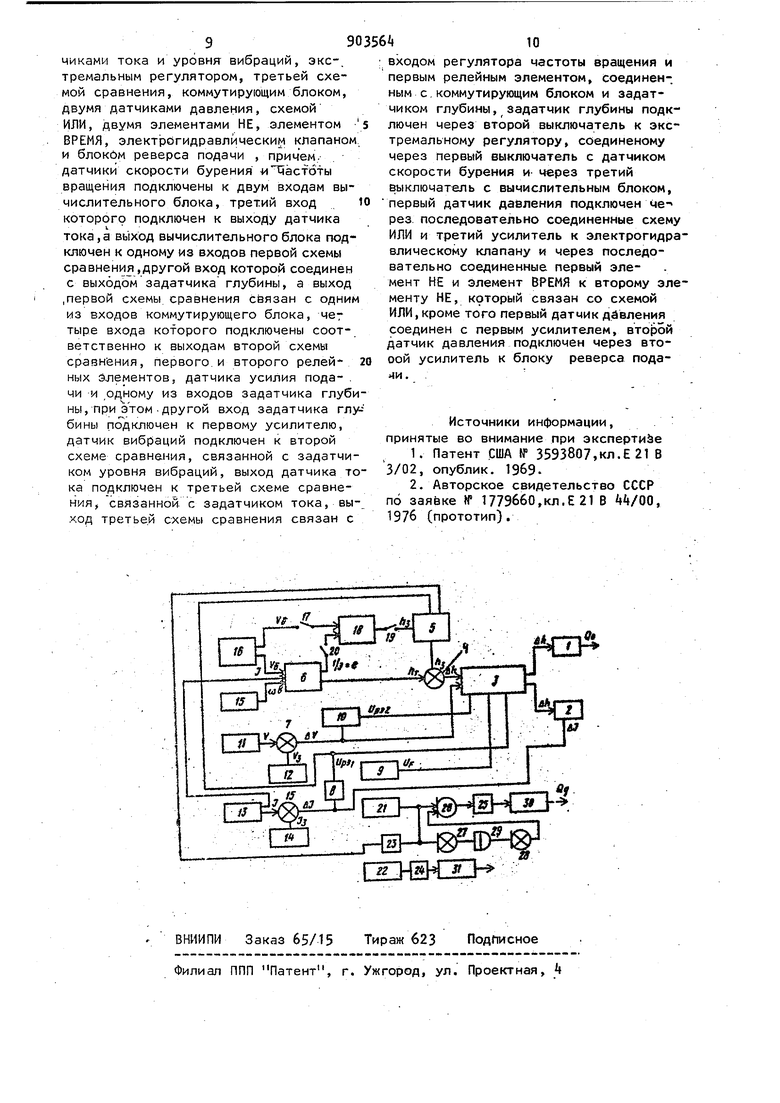
Изобретение относится к средствам автоматического управления режима ми вращательного бурения скважин и .: может быть использовано на бурильных машинах и крупных буровых станках, эксплуатируемых на подземных и открытых горных работах. Известна система управления передвижной буровой установкой, которая обеспечивает максимальную скорость бурения различных по своим физикомеханическим свойствам горных пород Однако данное устройство не реализует оптимальную глубину внедрения а режимные параметры йастраиваются на максимум механической скорости, что не всегда достигается при оптимальном ведении процесса разрушения. Наиболее близким техническим рецением является устройство, содержащее датчики скорости бурения, частоты вра щения, вибраций и усилия, схемы давле ния, вычислительный блок, задатчик глубины, регуляторы частоты вращения и нагрузки, усилители 2. Однако данное устройство не дает возможности режимных параметров по границе их допустимых значений т.е. по оптимальной глубине внедрения при бурении крепких пород по минимуму энергоемкости или максимуму механической скорости, а при бурении карстовых воронок, заполненных вязкими : глинами - по давлению в системе воздушно-водяной смеси. Цель изобретения - повышение точности и надежности управления при бурении в условиях резко изменяющихся прочностных и структурных свойств пород при имеющемся диапазоне регулирования режимных параметров по уровню вибраций буровой машины и по моменту на инструменте. Поставленная цель достигается тем, что устройство, содержащее датчик скорости бурения, частоты вращения глубины, две схемы сравнения. регулятор частоты вращения и усилия подачи, релейные элементы, усилители и выключатели, снабжено датчиками то ка, задатчиками тока и уровня вибраций, экстремальным регулятором, тр тьей схемой сравнения, коммутирующим блоком, двумя датчиками давления, . схемой ИЛИ, двумя элементами НЕ, эле ментом ВРЕМЯ, электрогидравлическим, клапаном бурового станка и блоком реверса подачи, при этом датчики ско рости бурения и частоты вращения под ключены к двум входам вычислительного блока, третий вход которого .подключен к выходу датчика тока, .а выход вычислительного блока подключен .к одному из входов первой схемы сравнения, другой вход которой соеди нен с выходом задатчика глубины, а выход первой схемы сравнения связан ОДНИМ из входов коммутирующего блока четыре входа которого подключены соответственно к выходам второй схемы сравнения, первого и второго релей.ных элементов, датчика усилия подачи и одному входу задатчика глубины, причем другой вход задатчика глубины подключен к первому усилителю, при этом датчик вибраций подключен к второй схеме сравнения, связанной с ; задатчиком уровня вибраций, а выход датчика тока подключен ко третьей схеме сравнения,связанной с задатчи ком тока, причем выход третьей схемы сргонения связан с входом регулятора частоты вращения и первым релейным элементом, соединенным с коммутирующим блоком и задатчиком глубины, задатчик глубины подключен через второй выключатель к экстремальному регулятору, соединенному через первый выключатель с датчиком скорости бурения и через третий выключатель с вычислительным блоком, первый датчик давления подключен через последовательно соединенные схему ИЛИ и трети усилитель к электрогидравлическому клапану и через последовательно соединенные первый элемент НЕ и элемент .ВРЕМЯ к второму элементу.НЕ,который связан со схемой ИЛИ, кроме того, пе вый датчик давления соединен с первы усилителем, второй датчик давления подключен через второй усилитель к блоку реверса подачи. На черетеже представлена функцио нальная блок-схема устройства управл ния режимами вращательного бурения гкважин. Устройство управления режимами вращательного бурения скважин содер-. жит регуляторы усилия подачи (Р/) 1 и частоты вращения (Ри) 2, входы которых связаны с выходом коммутирующего блока (КБ) 3. Вход коммутирующего блока 3 соединен с выходом схемы сравнения глубины внедрения 4, а входы последнего с выходами задатчика глубины (3h) 5 и вычислительного блока (ВБ) 6, реализующего текущее значение глубины внедрения. Коммутирующий блок также связан с подсистемами ограничений: с выходом схемы сравнения виброскорости 7, выходом релейного элемента ,(Р31) 8 подсистемы ограничения по току, с выходом датчика усилия подачи (ДР) 9, релейным элемен том (РЭ2.) 10 этой же подсистемы. Подсистема ограничений по вибрациям состоит из датчика вибраций (ДВ) 11, задатчика уровня вибраций (Зв) 12, схемы сравнения 7 и релейного элемента (РЭ2) 8. Подсистема ограничений по току двигателя вращателя состоит из датчика тока (ДТ) 13, задатчика тока (ЗТ) 1, схемы сравнения 15 и релейного элемента (РЭ1) 8. Вход вычислительного блока 6 связан с датчиками тока 13, частоты вращения (Do)) 15 и скорости бурения (DV5) 1б, причем последний через выключатель . (В1) 17 соединен с входом экстремального регулятора(ЭР) 18. Выход экстремального регулятора 18 через выключатель (82) 19 и задатчик глубины 5 связан с одним из входов схемы сравнения глубины внедрения t. Второй выход вычислительного блока 6, реализую- щего энергоемкость (ее обратную величину), через выключатель (ВЗ) 20 соединен с входом экстремального регу лятора 18. Задатчик глубины-внедрения 5 связан также с подсистемой прохожде-ния карста, состоящей из датчиков дав-- ления воздуха в системе воздушно-водя ной смеси (ДД1) 21 и (ДД2) 22, усилителей (У1) 23, (У2) 2k, (УЗ) 25, логического элемента ИЛИ 2б, логических элементов НЕ 27 и 28, логического элемента ВРЕМЯ 29, электрогидравлического клапана (ЭГК) 30 и блока реверса подачи(РП) 31. Устройство управления режимами бурения работает в одном из следующих режимов: I - отработка заданной величины глубины внедрения; II - поиск и отработка минимальной энергоемкости бурения (оптиилпьной глубины внедрения) ; III - поиск и отработка максимальной скорости бурения, В режиме I отрабатывается заданная задатчиком глубины 5 оптимальная глубина внедрения, которая может быт определена экспериментальным путем. Заданная глубина внедрения h,сравнивается в схеме сравнения k с текущим ее значением bf, полученным в вы числительном блоке 6 по данным датчи ка скорости бурения 16 (6)и датчика частоты вращения 15 (О) VS озТ Разность лЬ Ьр- Ь через коммутирую щий блок 3 поступает на регулятор др сселя подачи,- если усилие подачи не превышает максимального значения (U| Up nv)) при этом частота вращения максимальна. В этом случае h является управляющим сигналом для ре гулятора дросселя подачи, который выбирает такое его положение, при котором Ьз . При увеличении уста I ки дросселя подачи (el) усилие на забой возрастает и в момент времени когда Uf -lJfm).f., коммутирующий блок 3 отключает регулятор дросселя подач 1 и сигнал uh подает на регулятор ча тоты вращения. В последнем случае дЬ воздействует на систему таким образо что частота вращения уменьшается до тех пор, пока не установится равнове сие . Таким образом, режим I поддерживает постоянную заданную глубину внедрения регулированием или :усилия подачи, или частоты вращения. При этом реализуется алгоритм Ц (oi,ui8) ha ;(j06 const при кткхзс cC const; g Vxja. при mast В режиме II выход экстремального регулятора 18 через выключатель 19 И задатчик глубины 5 подключен к входу схемы сравнения 4, а вход его через выключатель 20 к вычислительному блоку 6, реализующему энергоемкость. Текущие значения скорости бурения V8 , тока двигателя вращателя I и частоты .вращения со поступают на входы вычислительного блока 6, который преобразует их на два выходных сигнала по алгоритму (1) и е --- (2) I в режиме II функцию задатчика глубины внедрения выполняет экстремальный регулятор 18, который выбирает по текущим значениям Vg , I, Wg такое значение ha, при котором бурение происходит с минимальной энергоемкостью или максимальной величиной е. При этом устройство реализует следующий алгоритм е (ос, 05,1) ; const при U i UF mo oC COnst; 36 Vi;a при UP UFYXXXX где fg (oi,Cj)e,I) - текущее значение величины обратной энергоемкости по выражению (2). В режиме III экстремальный регулйтор 18, на вход которого через выключатель 17 подается текущее значение скорости бурения от датчика скорости 16, подает на вход блока сравнения.4 через выключатель 19 и задатчик глубины 5 сигнал hs такой величины, который обеспечивает получение максимальной скорости бурения. В данном случае величина ha, может быть и не оптимальна.:В этом режиме устройство реализует алгоритм Vf maxf3(a,a)e) , ; We const при UF Uprnacc. c ojust; при Up U; m x«Защита бурового станка от заклинивания и превышения предельного момен та осуществляется двумя путями: сбросом усилия ;подачи и сбросом частоты вращения. При превышении тока двигателя заданной величины с блока сравнения 15, на входы которого поступает текущее значение тока I от датчика тока 13 и заданное его значение от задатчика тока 14, сигнал рассогласования Л1 I - 1з поступает на регулятор частоты вращателя 2 и релейный - Р этом, учитывая более высокое быстродействие регулятора частоты вращения, происходит сброс частоты вращения. Релейный элемент 8 отключает задатчик глубины внедрения 5 () , т.е. сбрасывается усилие подачи. Если в момент превышения заданного значения тока двигателя устройство производит регулирование по частоте вращения, коммутирующий блок 3 отключает регулятор частоты вращения 2 и включает регулятор усилия подачи 1. При этом происходит сброс уси- . ЛИЯ подачи. Эта подсистема работает во всех трех режимах. Защита бурового станка от вибраций осуществляется сбросом частоты вращения при превышении заданного уровня виброскорости. Сигнал Tetкущего значения виброскорости Vr с датчика вибрац-ий 1 поступает на вход схемы Сравнения 7, где сравнивается с заданным значением виброскорости УЗ-, установленным задатчиком вибраций 12. Сигнал рассогласования AV А -Уд, поступает на коммутирующий блок 3 и на релейный элемент 10. Сигнал с релейного элемента 8 также-поступает на коммутирующий блок 3 и, если производилось регулирование по частоте вращения, то отключает сигнал ЛЬ, а сигнал рассогласования со схемы сравнения 7 через коммутирующий блок 3 воздействует на регулятор частоты вращения 2 и частота вращения снижаетсй до тех пор, пока не будет достиг нут заданный уровень вибраций. Снижение частоты вращения приводит к увели чению тока двигателя и при достижении его номинального значения выход из зо ны повышенных вибраций осуществляется уменьшением усилия подачи. Эта подсистема работает во всех.трех режи . Подсистема прохождения карста ра-ботает следующим образом. При входе инструмента в закарстованный участок, заполненный как правило, вязкими глинами, песком, ела бь.ми сланцами происходит частичная или полная закупорка пневмомагистралей долота, что повышает давление в системе очистки забоя сжатым воздухом или воздушно-водяной смесью. Датчики 21 и 22 настроены соответ- . ственно на нижний и верхний уровень давления сжатого воздуха. При достижении в процессе закупорки пневмомагис(Трали нижнего уровня давления сигнал с датчика 21 подается на один из входов логического элемента ИЛИ 26, на вход логического элемента НЕ 27 и через усилитель 23 на задатчик глу бины 5. Указанный сигнал отключает за дание глубины внедрения, т.е. прекращается подача инструмента на забой. Одновременно на второй вход логического элемента ИЛИ 26 от логического элемента НЕ 28 поступает сигнал. Сигнал с элемента ИЛИ 26, усиленный усилителем25, включает элёктрогидрав лический клапан 30, обеспечивая по- . .вышенный расход воды, подаваемой .в э 8 скважину. Увеличение расхода воды и превращение подачи инструмента на забой скважины приводит к расштыбовке долота, т.е. падению давления в пневмомагистрали, в результате чего исчезает сигнал с датчика 21. Исчезновение этого сигнала приводит к включению задатчика глубины внедрения 5, на выходе элемента НЕ 27 появляется сигнал, который элементом ВРЕМЯ 29 задерживается, т.е. на время задержки на входе элемента НЕ 28 отсутствует сигнал, а на его выходе и входе элемента ИЛИ 26 будет единичный сигнал, Таким образом, в течение времени задержки производится бурение с повышенным расходом воды. Если прекращение подачи инструмента на забой скважины и увеличение расхода воды не приводит к падению давления в пневмомагистрали.и давление достигает верхнего предела, сигнал с датчика давления 22 через усилитель 2 поступает на устройство реверса подачи 31, которое осуществляет подъем инструмента над забоем с повышенной подачей воды для расшть( долота. Достижение нормального рабочего давления воздуха в пневмомагистрали переводит станок в исходное положение. Предложенное устройство позволяет повысить скорость бурения на 10-20% и стойкость бурового инструмента на , снизить удельный расход электроэнергии на 15-20. Ожидаемый экономический эффект от внедрения 5-8 тыс. руб. на одно устройство. Формула изобретения Устройство для управления режимами вращательного бурения скважин, содержащее датчики скорости бурения, частоты вращения, вибраций и усилия, вычислительный блок, задатчик глубины, две схемы сравнения, регуляторы частоты вращения и усилия подачи, релейные элементы, усилители и выключатели, отличающееся тем, что, с целью повышения точности и надежности управления в условиях резко изменяющихся прочностных и структурных свойств пород при имеющемся диапазоне регулирования параметров и ограничениях по уровню вибраций буровой машины и по моменту на инструменте, оно снабжено датчиком тока, задат

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления режимами вращательного бурения | 1981 |
|
SU1030543A1 |
| Регулятор нагрузки горной машины | 1983 |
|
SU1167325A1 |
| Устройство для автоматического управления процессом шарошечного бурения | 1985 |
|
SU1286748A1 |
| Устройство для автоматического управления процессом шарошечного бурения | 1980 |
|
SU901478A1 |
| Регулятор подачи бурового инструмента | 1983 |
|
SU1118762A1 |
| Система автоматического управления бурового механизма | 1989 |
|
SU1716111A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРОЦЕССОМ БУРЕНИЯ | 1992 |
|
RU2067170C1 |
| Автоматический регулятор вращения и подачи бурового инструмента | 1989 |
|
SU1740645A1 |
| Способ управления горной машиной и устройство для его осуществления | 1981 |
|
SU972092A1 |
| Система автоматического регулирования осевой нагрузки частоты вращения | 1990 |
|
SU1719122A1 |
