Изобретение относится к бурильной технике, в частности к способу и устройству автоматического горизонтирования несущей платформы с расположенным на ней буровым агрегатом и используется на самоходных бурильных установках.
Разработка крепких руд связана с большими затратами труда, времени и средств на бурение взрывных скважин и шпуров. Как в отечественной, так и зарубежной практике наблюдается тенденция создания малогабаритного самоходного оборудования, обусловленная большим объемом проведения выработок малых площадей сечений, особенно на рудниках цветной металлургии.
Характеристика, классификация и условия применения различных способов и конструкций современных буровых устройств, самоходных бурильных установок отечественного и зарубежного производства описаны в [1] - Техника бурения при разработке месторождений полезных ископаемых. - 3-е изд., перераб. и доп. - М.: Недра, 1987.
В момент времени, когда самоходная бурильная установка с несущей платформой (рамой) с расположенным на ней буровым агрегатом выведена оператором на предварительно размеченную (или выбранную оператором) позицию на местности и приступает к подготовке по выполнению основных технологических операций, таких как бурение, забивание свай, подъемные работы и т.д., необходимо устойчиво зафиксировать несущую платформу параллельно плоскости горизонта и/или расположить основное технологическое устройство (бурильный агрегат), закрепленное на несущей платформе, вертикально или под определенным углом к вертикальной оси.
Выставку бурового агрегата из транспортного положения в рабочее положение принято называть горизонтированием. С помощью гидросистемы на буровых устройствах выполняются операции горизонтирования бурового агрегата, используя три гидравлических домкрата осуществляют подъем мачты в рабочее и опускание в транспортное положения [2] - Станки шарошечного бурения. Ю.А. Нанкин, П.М. Пипко, Л.И. Балагуров. М.: Недра, 1970, с.103.
Одним из основных требований к таким устройствам является обеспечение требуемой точности и оперативности горизонтирования несущей платформы с расположенным на ней буровым агрегатом.
Однако все устройства, описанные в [1] и [2], не могут обеспечить требуемую точность, т.к. горизонтирование несущей платформы с буровым агрегатом осуществляется путем ручного перебора включения гидравлических домкратов, закрепленных на нижней части несущей платформы, с ориентацией на пузырьковый уровень или отвес, установленный в кабине самоходной бурильной установки.
Например, известна схема гидравлической системы управления манипуляторами и опорными домкратами бурильной установки [1] - Техника бурения при разработке месторождений полезных ископаемых. - 3-е изд., перераб. и доп. - М. : Недра, 1987, с.88-89, рис.3.12. Эта система содержит гидрораспределитель управления опорными домкратами, на которых выставляют бурильный агрегат на период бурения. Два домкрата соединены параллельно и питаются от одной секции гидрораспределителя, а еще два домкрата имеют раздельное управление, что позволяет горизонтировать несущую платформу (раму) машины. Фиксацию установки осуществляют гидрозамками.
Горизонтирование несущей платформы с расположенным на ней буровым агрегатом в описанном техническом решении осуществляется путем ручного перебора включения домкратов с ориентацией на отвес, что не позволяет обеспечить требуемую точность выставки несущей платформы с расположенным на ней буровым агрегатом.
Известно другое техническое решение [3] - Технология и оборудование для свайных и буровых работ: Сборник научных трудов Всесоюзного научно-исследовательского института гидромеханизации сан.-тех. и специальных строительных работ. Под редакцией кандидата технических наук В.В. Верстова. - Л., 1988, с.16, рис.2. Базовая установка по этому техническому решению является самостоятельной самоходной сваевдавливающей машиной, которая содержит: экскаватор ЭО-6122, сварную раму, левый и правый откидные аутригеры, гидроцилиндры поворота аутригеров, пригрузы, кронштейн опорный, опора поворотная, механизм зажима и вдавливания свай, мачта с подвижной кареткой, штанга опорная с установленным на ней датчиком прибора "Вертикаль-20Б".
По прибору "Вертикаль-20Б" машинист-оператор определяет угол наклона мачты в двух направлениях - "вперед-назад" и "вправо-влево". Прибор служит для ориентации в заданное угловое положение поворотной опоры с мачтой и механизмом зажима сваи.
Работает это устройство следующим образом. Опускают мачту в горизонтальное положение, осуществляют поворот аутригеров в стороны, погружают сваи на опорные ролики каретки и поворотной опоры, фиксируют сваи в каретке и механизме зажима, поворачивают мачты в вертикальное положение, устанавливают мачты в заданное угловое положение по прибору "Вертикаль-20Б" путем выдвижения (опускания) гидродомкратов аутригеров, погружают сваи в грунт, осуществляют самоходное перемещение установки на новую точку погружения сваи.
В этом техническом устройстве, в отличие от предыдущего, используется прибор с датчиком - "Вертикаль-20Б", однако горизонтирование осуществляется вручную.
Известно устройство для перемещения и выравнивания вышечного блока бурильной установки [4] - заявка России 95109138/03 от 06.06.1995 г., опубликованное 27.05.1997 г., МПК6 Е 21 В 15/00. Это изобретение относится к основаниям, имеющим возможность перемещения в собранном виде с размещенным на нем оборудованием, например вышечным блоком, при перемещении от скважины к скважине в буровых установках для кустового бурения. Устройство снабжено двуплечими рычагами, каждый из которых меньшим плечом шарнирно связан с несущей платформой (рамой), а большим плечом - с нижней частью домкрата, в средней части каждого рычага установлено колесо, ось которого является точкой опоры. Верхняя часть домкрата связана с основанием. Колесо взаимодействует с рельсами, установленными на направляющих балках, с которыми имеет возможность взаимодействия несущая платформа в стационарном положении блока. Под действием усилия выдвигаемых штоков домкратов происходит поворот рычагов относительно осей колес: большее плечо рычагов будет перемещаться вниз, а меньшее - вверх вместе с несущей платформой вышечного блока, одновременно штоки домкратов воздействуют на несущую платформу силой, направленной вверх. Производится подъем несущей платформы относительно направляющих балок, на которых установлены рельсы, взаимодействующие с колесами.
Недостатком этого технического решения, как и предыдущего, является то, что горизонтирование несущей платформы осуществляется вручную.
Известно устройство - бурильно-крановая машина [5] - патент России 2019664, МПК5 Е 21 В 7/02. Это изобретение относится к передвижным бурильно-крановым машинам с полноповоротными платформами и предназначено, в частности, для бурения на пересеченной местности. Бурильно-крановая машина содержит стрелу с буровым и грузоподъемным оборудованием, транспортное средство с базовой рамой, полноповоротную платформу, промежуточный с основанием элемент, соединенный с полноповоротной платформой и со стрелой шарнирно, гидроцилиндр наклона стрелы, полноповоротная платформа закреплена на дополнительной раме, которая шарнирно соединена с базовой рамой, а базовая рама и дополнительная рама соединены шарнирно посредством дополнительного приводного гидроцилиндра.
Недостатком этого технического решения является то, что горизонтирование платформы и бурового агрегата осуществляется вручную.
Наиболее близким техническим решением к заявляемому устройству является станок [6] - СБШ-250МНА-32 091-00.00.0000 ТО, спроектирован СКБ самоходного горного оборудования Минтяжмаша. Конструкция и эксплуатация станков приведенного типа подробно описана на примере станка 2СБШ-200 в [2] - Станки шарошечного бурения. Ю.А. Нанкин, П.М. Пипко, Л.И. Балагуров. М.: Недра, 1970, с. 103.
Устройство-прототип содержит ход гусеничный, машинное отделение, буровой агрегат (мачту), емкость для воды и кабину. Несущую платформу (раму) бурового агрегата (станка) при бурении вывешивают на трех домкратах.
Работает это устройство следующим образом.
Например, при передвижении буровой агрегат находился в транспортном положении, машинист включением крестового переключателя на станке СБШ-250МНА-32 управления гидроцилиндрами домкратов устанавливает буровой агрегат в рабочее положение. Помощник машиниста закрепляет его к основанию с помощью фиксирующих болтов.
Машинист включением крестовых переключателей управления гидроцилиндрами домкратов горизонтирования производит горизонтирование бурового агрегата следующим образом. Сначала буровой агрегат поднимают на заднем домкрате, а затем горизонтируют двумя передними. Домкраты включают в любой последовательности.
Горизонтирование бурового агрегата осуществляется включением переключателей с табличкой домкрат I, с табличкой домкрат II и табличкой домкрат III, которые позволяют выполнить следующие операции: подъем бурового агрегата и опускание его.
Для управления указанными операциями необходимо каждый из переключателей повернуть в положения:
"поднять", при этом включаются магнитные пускатели и включающие двигатели и электромагниты гидрораспределителей;
"опустить", при этом включаются магнитные пускатели, включающие двигатели и электромагниты гидрораспределителей.
Помощник машиниста должен следить за тем, чтобы опорные плиты домкратов прилегали к грунту всей поверхностью. При необходимости площадь прилегания должна быть спланирована.
Контроль за горизонтальным положением бурового агрегата в период горизонтирования и во время бурения осуществляется при помощи отвеса, установленного в кабине.
После окончания горизонтирования вес бурового агрегата должен восприниматься домкратами, при этом нижние опорные катки гусеничных тележек должны быть подняты над катками гусениц.
Описанное техническое решение [6] не позволяет обеспечить для современной техники требуемую точность и оперативность горизонтирования несущей платформы с расположенным на ней буровым агрегатом, так как горизонтирование осуществляют путем ручного перебора включения домкратов с ориентацией на отвес, установленный в кабине транспортного средства.
Точность горизонтирования зависит от погрешности, вносимой действиями оператора (машиниста) агрегата.
Оперативность горизонтирования зависит от скорости принятия решений оператором агрегата и от выбранной последовательности выдвижения домкратов.
Расположение бурового агрегата после выполнения горизонтирования в максимально устойчивое положение должно обеспечиваться максимальным подъемом бурового агрегата над поверхностью грунта в процессе горизонтирования.
Горизонтирование путем ручного перебора включения домкратов с ориентацией на отвес осуществляется путем последовательного приближения положения бурового агрегата к заданному положению, которое подразумевает выдвижение гидравлических домкратов несколько раз.
В ручном режиме горизонтирования (при последовательном приближении бурового агрегата к заданному положению) подъем агрегата над поверхностью грунта выше минимально возможной высоты практически неизбежен, это, естественно, уменьшает технический ресурс горизонтирования бурового агрегата на конкретной (выбранной) площадке.
Задача, на решение которой направлено заявляемое изобретение, - это обеспечение для современной техники требуемой точности и оперативности горизонтирования несущей платформы с буровым агрегатом и установка бурового агрегата в максимально устойчивое положение после горизонтирования. В заявляемом изобретении эта задача достигается путем автоматического управления горизонтированием несущей платформы с расположенным на ней буровым агрегатом.
Поставленная задача решается следующим образом.
В способ автоматического горизонтирования несущей платформы с буровым агрегатом, при котором самоходная буровая установка с несущей платформой и расположенным на ней буровым агрегатом, находящемся в транспортном положении, выведена на предварительно размеченную рабочую площадку на местности и приступает к подготовке по выполнению основных технологических операций,
заключающийся в том, что
определяют положение бурового агрегата относительно рабочей площадки для установки его в рабочее положение,
выдвигают по меньшей мере три гидравлических домкрата до соприкосновения с грунтом,
несущую платформу с расположенным на ней буровым агрегатом устанавливают в горизонтальное положение в двух плоскостях по осям Х и Y
и/или располагают бурильный агрегат вертикально или под определенным углом к оси Y,
согласно изобретению дополнительно вводят следующую последовательность операций:
включают гидравлические домкраты и осуществляют предварительное выдвижение всех гидравлических домкратов до соприкосновения с грунтом,
осуществляют давление на все гидравлические домкраты, равное или близкое к весу бурового агрегата,
последовательно включают гидравлические домкраты и осуществляют кратковременное выдвижение гидравлических домкратов для гарантированного вывешивания бурового агрегата на гидравлических домкратах,
формируют команду на автоматическое горизонтирование бурового агрегата, сначала по оси X, а затем по оси Y,
анализируют положение несущей платформы с расположенным на ней буровым агрегатом по осям Х и Y, причем сначала анализируют положение по оси X, а затем по оси Y,
используя результаты полученного анализа, корректируют положение бурового агрегата в процессе установки его в горизонтальное положение по осям Х и Y путем автоматического управления выдвижением гидравлических домкратов,
формируют команду на окончание горизонтирования, если в процессе коррекции достигнуто одновременно горизонтирование по осям Х и Y несущей платформы и бурового агрегата,
если в процессе коррекции не достигнуто горизонтирование по осям Х и Y несущей платформы и бурового агрегата, то формируют команду на повторение цикла горизонтирования, начиная с начала анализа положения несущей платформы с буровым агрегатом по оси X.
Коррекцию горизонтирования бурового агрегата осуществляют таким образом, что сначала анализируют положение бурового агрегата по оси X, используя начальные результаты анализа положения несущей платформы с буровым агрегатом по оси Х, при этом,
если задняя часть бурового агрегата опущена, то осуществляют коррекцию положения бурового агрегата в соответствии с результатами полученного анализа по оси Y, затем формируют управляющий сигнал, по которому выполняют коррекцию гидравлическим домкратом, используя при этом результаты полученного анализа по оси X;
если задняя часть бурового агрегата поднята, то осуществляют коррекцию положения бурового агрегата по оси X, включая гидравлический домкрат, который расположен по оси Y ниже, если по оси Y буровой агрегат стоит ровно, то горизонтирование осуществляют, включая заданный по умолчанию гидравлический домкрат, который расположен по оси Y, затем формируют управляющий сигнал, по которому выполняют коррекцию гидравлическим домкратом, используя при этом результаты полученного анализа по оси X.
В устройство автоматического горизонтирования несущей платформы с буровым агрегатом, которые расположены на самоходной бурильной установке, имеющей в кабине оператора пульт управления, включающий блок переключателей, содержащий по меньшей мере три переключателя для включения и отключения гидравлических домкратов, содержащее последовательно соединенные первый блок управления гидравлическим домкратом и первый гидравлический домкрат, последовательно соединенные второй блок управления гидравлическим домкратом и второй гидравлический домкрат, последовательно соединенные третий блок управления гидравлическим домкратом и третий гидравлический домкрат, причем блоки управления гидравлическими домкратами и гидравлические домкраты расположены на нижней части несущей платформы и жестко закреплены, первый вход блока переключателей, образующий вход сигнала начала горизонтирования несущей платформы с буровым агрегатом, является первым входом устройства, первый, второй и третий выходы блока переключателей соответственно соединены с первыми входами первого, второго и третьего блоков управления гидравлическими домкратами,
согласно изобретению введены:
датчик давления, анализирующий давление на гидравлических домкратах,
формирователь временного интервала, определяющий время кратковременного выдвижения домкратов,
первый датчик уровня, анализирующий положение несущей платформы с буровым агрегатом по оси Х в процессе горизонтирования,
второй датчик уровня, анализирующий положение несущей платформы с буровым агрегатом по оси Y в процессе горизонтирования,
блок управления горизонтированием,
вход датчика давления является вторым входом устройства, выход датчика давления соединен с первым входом блока управления горизонтированием,
вход формирователя временного интервала является третьим входом устройства, выход формирователя временного интервала соединен со вторым входом блока управления горизонтированием,
первый вход первого датчика уровня является четвертым входом устройства, выход первого датчика уровня соединен с третьим входом блока управления горизонтированием, первый выход блока управления горизонтированием соединен со вторым входом первого датчика уровня,
первый вход второго датчика уровня является пятым входом устройства, выход второго датчика уровня соединен с четвертым входом блока управления горизонтированием, второй выход блока управления горизонтированием соединен со вторым входом второго датчика уровня,
третий выход блока управления горизонтированием соединен со вторым входом первого блока управления гидравлическим домкратом,
четвертый выход блока управления горизонтированием соединен со вторым входом второго блока управления гидравлическим домкратом,
пятый выход блока управления горизонтированием соединен со вторым входом третьего блока управления гидравлическим домкратом,
шестой выход блока управления горизонтированием соединен со вторым входом блока переключателей,
пятый вход блока управления горизонтированием соединен с четвертым выходом блока переключателей, пятый выход которого является выходом устройства.
Сопоставительный анализ заявляемого способа автоматического горизонтирования несущей платформы с буровым агрегатом показывает, что заявляемый способ существенно отличается от прототипа [5]. Отличия заключаются в том, что в заявляемом способе включают все гидравлические домкраты и осуществляют предварительное выдвижение гидравлических домкратов до соприкосновения с грунтом, одновременно осуществляют давление на все гидравлические домкраты, равное или близкое к весу бурового агрегата, последовательно включают гидравлические домкраты и осуществляют кратковременное выдвижение гидравлических домкратов для гарантированного вывешивания бурового агрегата на гидравлических домкратах, формируют команду на автоматическое горизонтирование бурильного агрегата, сначала по оси X, а затем по оси Y, анализируют положение несущей платформы с расположенным на ней буровым агрегатом по осям Х и Y, причем сначала анализируют положение по оси X, а затем по оси Y, используя результаты полученного анализа, корректируют положение бурового агрегата в процессе установки его в горизонтальное положение по осям Х и Y путем автоматического управления выдвижением гидравлических домкратов, формируют команду на окончание горизонтирования, если в процессе коррекции достигнуто одновременно горизонтирование по осям Х и Y несущей платформы и бурового агрегата.
Таким образом, заявляемый способ позволяет автоматически управлять горизонтированием несущей платформы с расположенным на ней буровым агрегатом, обеспечивая требуемую (более высокую) точность и оперативность горизонтирования по сравнению с прототипом, где горизонтирование осуществляется путем ручного перебора включения гидравлических домкратов с ориентацией на отвес, установленный в кабине самоходной бурильной установки. Следовательно, заявляемый способ отвечает критерию изобретения "новизна".
Сравнение заявляемого способа с другими техническими решениями в данной области техники [1], [2], [3] [4] и [5] не позволило выявить признаки, заявленные в отличительной части формулы изобретения. К сожалению, для самоходных бурильных установок задача по автоматическому горизонтированию до сих пор не решена.
Сопоставительный анализ заявляемого устройства автоматического горизонтирования несущей платформы с расположенным на ней буровым агрегатом показывает, что заявляемое устройство существенно отличается от прототипа [6]. Отличия заключаются в том, что заявляемое устройство содержит: датчик давления, анализирующий давление на гидравлических домкратах, формирователь временного интервала, определяющий время кратковременного включения гидравлических домкратов, первый датчик уровня, анализирующий положение несущей платформы с буровым агрегатом по оси Х в процессе горизонтирования, второй датчик уровня, анализирующий положение несущей платформы с буровым агрегатом по оси Y в процессе горизонтирования, блок управления горизонтированием, осуществляющий автоматическое управление процессом горизонтирования. Заявляемое устройство полностью реализует признаки заявляемого способа и позволяет автоматически управлять горизонтированием несущей платформы с расположенным на ней буровым агрегатом, обеспечивая более высокую точность и оперативность горизонтирования по сравнению с прототипом. Следовательно, заявляемое устройство отвечает критерию изобретения "новизна".
Сравнение заявляемого устройства с другими техническими решениями в данной области техники [1], [2], [3] [4] и [5] не позволило выявить признаки, заявленные в отличительной части формулы изобретения.
Следовательно, заявляемые способ и устройство, созданные в едином изобретательском замысле, отвечают критериям изобретения "существенные отличия", "неочевидность" и отвечают изобретательскому уровню.
Описание изобретения поясняется графическими материалами.
На фиг.1 показана самоходная бурильная установка (например, типа СБШ-250 МНА-32), фиг.1 иллюстрирует общий вид бурового устройства, где
1 - ход гусеничный,
2 - машинное отделение,
3 - несущая платформа,
4 - буровой агрегат (мачта),
5 - кабина оператора,
6 - пульт управления, расположенный в кабине оператора.
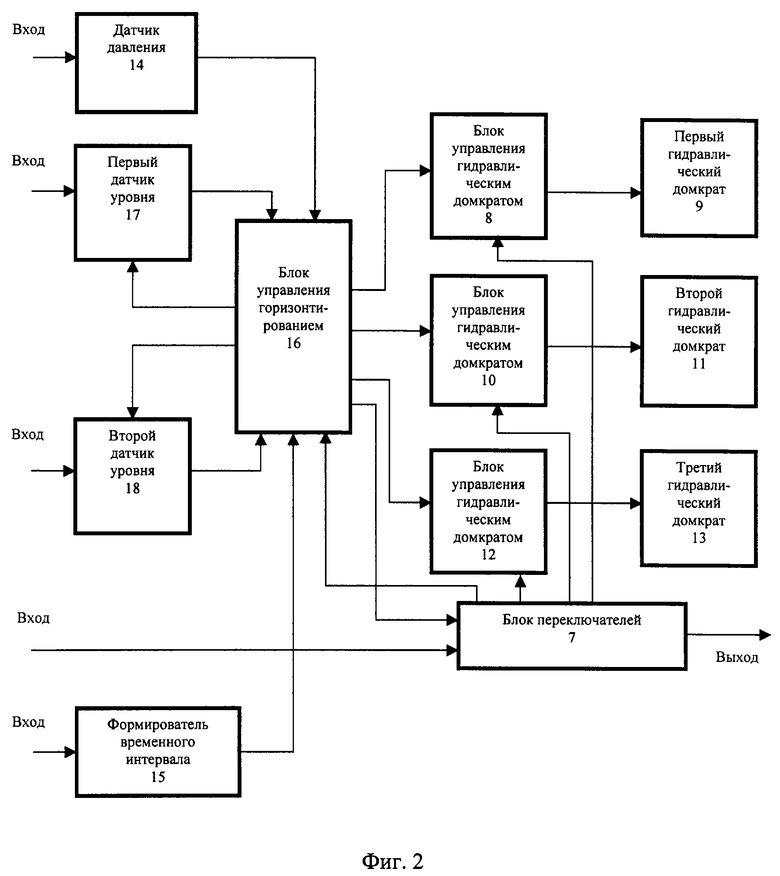
На фиг. 2 показана блок-схема заявляемого устройства автоматического горизонтирования несущей платформы с буровым агрегатом.
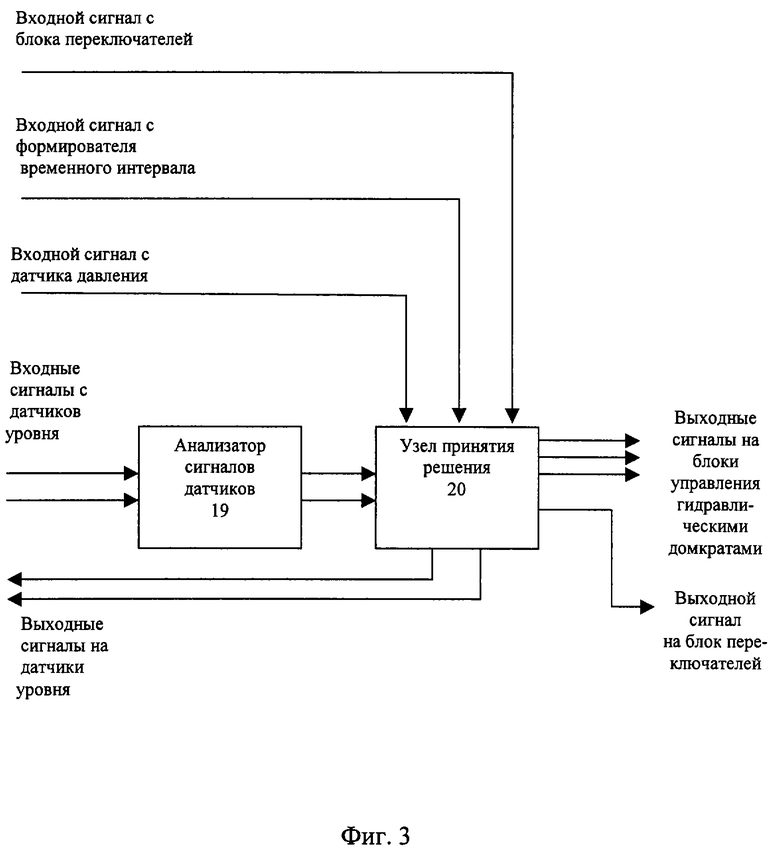
На фиг.3 показан блок управления горизонтированием, приведен в качестве примера выполнения.
Заявляемое устройство автоматического горизонтирования несущей платформы с буровым агрегатом (фиг.2) содержит блок переключателей 7, последовательно соединенные первый блок управления гидравлическим домкратом 8 и первый гидравлический домкрат 9, последовательно соединенные второй блок управления гидравлическим домкратом 10 и второй гидравлический домкрат 11, последовательно соединенные третий блок управления гидравлическим домкратом 12 и третий гидравлический домкрат 13, первый вход блока переключателей 7, образующий вход сигнала начала горизонтирования несущей платформы с буровым агрегатом, является первым входом устройства, первый, второй и третий выходы блока переключателей 7 соответственно соединены с первыми входами первого 8, второго 10 и третьего 12 блоков управления гидравлическими домкратами; кроме того, согласно изобретению, устройство дополнительно содержит датчик давления 14, формирователь временного интервала 15, первый датчик уровня 17, второй датчик уровня 18, блок управления горизонтированием 16, при этом вход датчика давления 14 является вторым входом устройства, выход датчика давления 14 соединен с первым входом блока управления горизонтированием 16, вход формирователя временного интервала 15 является третьим входом устройства, выход формирователя временного интервала 15 соединен со вторым входом блока управления горизонтированием 16, первый вход первого датчика уровня 17 является четвертым входом устройства, выход первого датчика уровня 17 соединен с третьим входом блока управления горизонтированием 16, первый выход блока управления горизонтированием 16 соединен со вторым входом первого датчика уровня 17, первый вход второго датчика уровня 18 является пятым входом устройства, выход второго датчика уровня 18 соединен с четвертым входом блока управления горизонтированием 16, второй выход блока управления горизонтированием 16 соединен со вторым входом второго датчика уровня 18, третий выход блока управления горизонтированием 16 соединен со вторым входом первого блока управления гидравлическим домкратом 8, четвертый выход блока управления горизонтированием 16 соединен со вторым входом второго блока управления гидравлическим домкратом 10, пятый выход блока управления горизонтированием 16 соединен со вторым входом третьего блока управления гидравлическим домкратом 12, шестой выход блока управления горизонтированием 16 соединен со вторым входом блока переключателей 7, пятый вход блока управления горизонтированием 16 соединен с четвертым выходом блока переключателей 7, пятый выход которого является выходом устройства.
Блок управления горизонтированием 16 (фиг.3) содержит анализатор сигналов датчиков 19 и узел принятия решения 20, при этом первый и второй входы анализатора сигналов датчиков 19 образуют соответственно третий и четвертый входы блока управления горизонтированием 16, первый и второй выходы анализатора сигналов датчиков 19 соответственно соединены с первым и вторым входами узла принятия решения 20, третий вход узла принятия решения 20 образует первый вход блока управления горизонтированием 16, четвертый вход узла принятия решения 20 образует второй вход блока управления горизонтированием 16, пятый вход узла принятия решения 20 образует пятый вход блока управления горизонтированием 16, первый выход узла принятия решения 20 образует первый выход блока управления горизонтированием 16, второй выход - второй выход блока управления горизонтированием, третий выход узла принятия решения 20 образует третий выход блока управления горизонтированием 16, четвертый выход узла принятия решения 20 - четвертый выход блока управления горизонтированием, а пятый выход узла принятия решения 20 - пятый выход блока управления горизонтированием, шестой выход узла принятия решения 20 - шестой выход блока управления горизонтированием 16.
Заявляемые способ и устройство, созданные в едином изобретательском замысле, предназначены для горизонтирования несущей платформы с расположенным на ней буровым агрегатом в момент времени, когда самоходная буровая установка с несущей платформой и расположенным на ней буровым агрегатом, находящемся в транспортном положении, выведена на предварительно размеченную рабочую площадку на местности и приступает к подготовке по выполнению основных технологических операций (бурение, забивание свай, подъемные работы и т.п.). Для этого необходимо из транспортного положения несущую платформу с буровым агрегатом установить в рабочее положение, для чего необходимо устойчиво зафиксировать несущую платформу параллельно плоскости горизонта (в двух плоскостях по осям Х и Y) и/или расположить бурильный агрегат, закрепленный на платформе вертикально или под определенным углом к вертикальной оси (оси Y).
Реализуют заявляемый способ, используя следующую последовательность операций.
Определяют положение бурового агрегата относительно рабочей площадки для установки его в рабочее положение. Включают все гидравлические домкраты и осуществляют предварительное выдвижение гидравлических домкратов до соприкосновения с грунтом. Одновременно осуществляют давление на все гидравлические домкраты, равное или близкое к весу бурового агрегата. Последовательно кратковременно включают первый, второй и третий гидравлические домкраты для гарантированного вывешивания бурового агрегата на гидравлических домкратах. Время включения определяется формирователем временного интервала 15. Формируют команду на автоматическое горизонтирование бурильного агрегата, сначала по оси X, а затем по оси Y.
Анализируют положение несущей платформы с расположенным на ней буровым агрегатом по осям Х и Y, используя показания первого 17 и второго 18 датчиков уровня, причем сначала анализируют положение по оси X, используя показания первого датчика уровня 17, а затем по оси Y, используя показания второго датчика уровня 18. Используя результаты полученного анализа, корректируют положение бурового агрегата в процессе установки его в горизонтальное положение по осям Х и Y путем автоматического управления выдвижением гидравлических домкратов 9, 11 и 13. Коррекцию горизонтирования бурового агрегата осуществляют таким образом, что сначала анализируют положение бурового агрегата по оси X, используя показания первого датчика 17, при этом, если задняя часть бурового агрегата опущена, то осуществляют коррекцию положения бурового агрегата в соответствии с результатами полученного анализа по оси Y, используя показания второго датчика 18, затем формируют управляющий сигнал, по которому выполняют коррекцию гидравлическим домкратом через соответствующий блок управления гидравлическим домкратом, используя при этом результаты полученного анализа с первого датчика 17; если задняя часть бурового агрегата поднята, то осуществляют коррекцию положения бурового агрегата по оси X, включая гидравлический домкрат, который расположен по оси Y ниже; если по оси Y буровой агрегат стоит ровно, то горизонтирование осуществляют, включая заданный по умолчанию гидравлический домкрат, который расположен по оси Y, затем формируют управляющий сигнал, по которому выполняют коррекцию гидравлическим домкратом через соответствующий блок управления гидравлическим домкратом, используя при этом результаты полученного анализа с первого датчика 17.
Формируют команду на окончание горизонтирования, если в процессе коррекции достигнуто одновременно горизонтирование по осям Х и Y несущей платформы и бурового агрегата. Если в процессе коррекции не достигнуто горизонтирование по осям Х и Y несущей платформы и бурового агрегата, то формируют команду на повторение цикла горизонтирования, начиная с момента анализа показаний первого датчика уровня 17.
Заявляемый способ реализуют, используя устройство автоматического горизонтирования несущей платформы с буровым агрегатом, блок-схема которого показана на фиг.2.
Оператор устанавливает время кратковременного включения гидравлических домкратов, необходимое для гарантированного вывешивания бурового агрегата на гидравлических домкратах.
Горизонтирование несущей платформы с расположенным на ней буровым агрегатом выполняется оператором при нажатии кнопки "Автоматическое горизонтирование", которая расположена на пульте управления в кабине оператора самоходной бурильной установки.
Сигнал "начало работы" поступает на вход блока переключателей 7. С четвертого выхода блока переключателей 7 сигнал включения поступает на пятый вход блока управления горизонтированием 16. По сигналу "начало работы" блок переключателей 7, содержащий по меньшей мере три переключателя, передает сигналы включения (соответственно первый, второй и третий выходы блока 7) на первый 8, второй 10 и третий 12 блоки управления гидравлическими домкратами. После достижения давления на все гидравлические домкраты, равное или близкое к весу бурового агрегата, сигнал с датчика давления 14 поступает на третий вход блока управления горизонтированием 16. По этому сигналу блок управления горизонтированием 16 последовательно кратковременно включает первый 9, второй 11 и третий 13 гидравлические домкраты для гарантированного вывешивания бурового агрегата на гидравлических домкратах и затем формирует включающие команды на вторые входы датчиков уровня 17 и 18.
Первый датчик уровня 17 анализирует положение несущей платформы с буровым агрегатом по оси Х в процессе горизонтирования и передает сигнал анализа на блок 16.
Второй датчик уровня 18 анализирует положение несущей платформы с буровым агрегатом оси Y в процессе горизонтирования и передает сигнал анализа на блок 16.
Блок управления горизонтированием 16 анализирует сигналы, поступившие с первого 17 и второго 18 датчиков уровня (в анализаторе сигналов датчиков 19, фиг. 3), и по результатам анализа принимает решение (узел принятия решения 20, фиг. 3). Блок 16 формирует соответствующие управляющие сигналы на блоки управления гидравлическими домкратами 8, 10 и 12, в соответствии с которыми эти блоки управляют выдвижением гидравлических домкратов.
Логика работы блока управления горизонтированием 16 исходит из того принципа, что любой из трех гидравлических домкратов в процессе горизонтирования должен только поднимать, иначе можно посадить бурильный агрегат на грунт, что запрещено условиями эксплуатации бурильных агрегатов.
Коррекцию горизонтирования бурового агрегата, например, осуществляют следующим образом.
В блоке 16 сначала анализируют положение бурового агрегата по оси X, используя показания первого датчика 17, при этом возможны два варианта горизонтирования.
Первый вариант. Если задняя часть бурового агрегата опущена, то сначала выполняют коррекцию горизонтирования по бортам (по оси Y) бурового агрегата гидравлическими домкратами в соответствии с сигналом второго датчика уровня 18, а затем по курсу (по оси X) гидравлическим домкратом в соответствии с сигналом первого датчика уровня 17.
Второй вариант. Если задняя часть бурильного агрегата поднята, то сначала выполняют коррекцию горизонтирования по курсу (по оси X) бурильного агрегата включением одного гидравлического домкрата борта, причем включают гидравлический домкрат того борта, который расположен ниже.
Если по оси Y бурильный агрегат стоит ровно, то включают гидравлический домкрат правого борта (установленный по умолчанию). Горизонтирование осуществляют по сигналам первого датчика уровня 17.
После окончания горизонтирования по оси Х происходит горизонтирование по оси Y бурильного агрегата гидравлическими домкратами бортов по сигналам второго датчика уровня 18, а затем горизонтирование по оси Х домкратом курса по сигналам первого датчика уровня 17.
В блоке 16 формируют команду на окончание горизонтирования, если в процессе коррекции достигнуто одновременно горизонтирование по осям Х и Y несущей платформы и бурового агрегата. Выходной сигнал (шестой выход блока) поступает на второй вход блока переключателей 7. Автоматическое горизонтирование закончено, устройство прекращает работу, отключается.
Если в процессе коррекции не достигнуто горизонтирование по осям Х и Y несущей платформы и бурового агрегата, то блок 16 формирует команду на повторение цикла горизонтирования, начиная с момента анализа показаний первого датчика уровня 17.
Заявляемое устройство автоматического горизонтирования несущей платформы с буровым агрегатом реализуется в производстве доступными средствами и не требует существенных дополнительных затрат.
Пульт управления располагается в кабине оператора самоходной бурильной установки и представляет собой металлический ящик с двумя откидными крышками. На лицевой стороне верхней крышки расположены кнопки управления, в том числе находится кнопка управления "Автоматическое горизонтирование". Внутри пульта управления находятся формирователь временного интервала 15, блок переключателей 7 и блок управления горизонтированием 16. Первый 17 и второй 18 датчики уровня могут находится в пульте управления или расположены по курсу (оси X) и по борту (оси Y) несущей платформы или бурового агрегата, а могут находится каком-либо в другом месте в зависимости от конкретной ситуации. Датчик давления 14 может находится в каком-либо месте бурового агрегата в зависимости от конкретной ситуации.
При реализации заявляемого устройства используются известные в промышленности блоки управления гидравлическими домкратами и гидравлические домкраты, например такие, как описаны в [2] - Станки шарошечного бурения. Ю. А. Нанкин, П. М. Пипко, Л.И. Балагуров. М.: Недра, 1970, с. 129. Первый и второй гидравлические домкраты расположены в передней части платформы у рабочего органа, а третий - в задней части по оси платформы. По окончании горизонтирования положение гидравлических домкратов фиксируется гидрозамками. Опорные плиты домкратов соединены с гидравлическими цилиндрами шарнирно. При передвижении бурового агрегата опорные плиты домкратов поднимаются вверх, обеспечивая клиренс устройства.
Таким образом, предлагаемые способ и устройство несложны в реализации и по сравнению с известными техническими решениями в данной области техники обладают явными преимуществами, так как они обеспечивают автоматическое горизонтирование несущей платформы с расположенным на ней буровым агрегатом, что существенно повышает точность и оперативность выставки и облегчает процесс горизонтирования для оператора самоходной бурильной установки.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОРИЕНТАЦИИ-УСТАНОВКИ НЕСУЩЕЙ ГРУЗОВОЙ ПЛАТФОРМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2367762C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОДАЧЕЙ МАШИНЫ ДЛЯ БУРЕНИЯ ГОРНОЙ ПОРОДЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2235199C1 |
| СПОСОБ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ-УСТАНОВКИ НЕСУЩЕЙ ГРУЗОВОЙ ПЛАТФОРМЫ | 2011 |
|
RU2496710C2 |
| АГРЕГАТ РЕМОНТНО-БУРОВОЙ АР32/40 | 2007 |
|
RU2380512C2 |
| МОБИЛЬНАЯ БУРОВАЯ УСТАНОВКА | 2001 |
|
RU2190076C1 |
| Мобильный буровой комплекс | 1988 |
|
SU1553644A1 |
| ПОДЪЕМНО-МАЧТОВОЕ УСТРОЙСТВО МОБИЛЬНОЙ АНТЕННОЙ УСТАНОВКИ | 2008 |
|
RU2373618C1 |
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО ПОДАЧИ ПОЖАРНО-СПАСАТЕЛЬНОЙ ЛЕСТНИЦЫ ДЛЯ АВТОМОБИЛЕЙ СЛУЖБЫ СПАСЕНИЯ И АВТОЛЕСТНИЦ (ВАРИАНТЫ) | 2011 |
|
RU2496541C2 |
| МОБИЛЬНАЯ АНТЕННАЯ УСТАНОВКА | 2019 |
|
RU2737921C1 |
| СТАНОК БУРОВОЙ | 2019 |
|
RU2704496C1 |
Изобретение относится к бурильной технике, в частности к способу и устройству автоматического горизонтирования несущей платформы с расположенным на ней буровым агрегатом, и используется на самоходных бурильных установках. Техническим результатом является обеспечение для современной техники требуемой точности и оперативности горизонтирования несущей платформы с буровым агрегатом и установка бурового агрегата в максимально устойчивое положение после горизонтирования. Для этого самоходную буровую установку с несущей платформой и расположенным на ней буровым агрегатом, находящимся в транспортном положении, выводят на предварительно размеченную рабочую площадку на местности и приступают к подготовке по выполнению основных технологических операций, заключающейся в том, что определяют положение бурового агрегата относительно рабочей площадки для установки его в рабочее положение, выдвигают по меньшей мере три гидравлических домкрата до соприкосновения с грунтом, несущую платформу с расположенным на ней буровым агрегатом устанавливают в горизонтальное положение в двух плоскостях по осям Х и Y и/или располагают бурильный агрегат вертикально или под определенным углом к оси Y. Включают гидравлические домкраты и осуществляют предварительное выдвижение всех гидравлических домкратов до соприкосновения с грунтом. Осуществляют давление на все гидравлические домкраты, равное или близкое к весу бурового агрегата, последовательно включают гидравлические домкраты и осуществляют кратковременное выдвижение гидравлических домкратов для гарантированного вывешивания бурового агрегата на гидравлических домкратах, формируют команду на автоматическое горизонтирование бурового агрегата, сначала по оси X, а затем по оси Y. Анализируют положение несущей платформы с расположенным на ней буровым агрегатом по осям Х и Y, причем сначала анализируют положение по оси X, а затем по оси Y, используя результаты полученного анализа, корректируют положение бурового агрегата в процессе установки его в горизонтальное положение по осям Х и Y путем автоматического управления выдвижением гидравлических домкратов, формируют команду на окончание горизонтирования, если в процессе коррекции достигнуто одновременно горизонтирование по осям Х и Y несущей платформы и бурового агрегата, если в процессе коррекции не достигнуто горизонтирование по осям Х и Y несущей платформы и бурового агрегата, то формируют команду на повторение цикла горизонтирования, начиная с начала анализа положения несущей платформы с буровым агрегатом по оси X. Устройство расположено на самоходной бурильной установке, имеющей в кабине оператора пульт управления, включающий блок переключателей, содержащий по меньшей мере три переключателя для включения и отключения гидравлических домкратов, содержащее три блока управления гидравлическими домкратами, последовательно соединенные соответственно с тремя гидравлическими домкратами. Причем блоки управления гидравлическими домкратами и гидравлические домкраты расположены на нижней части несущей платформы и жестко закреплены. Устройство также содержит датчик давления, формирователь временного интервала, два датчика уровня, один из которых анализирует положение несущей платформы с буровым агрегатом по оси Х в процессе горизонтирования, другой - положение несущей платформы с буровым агрегатом оси Y в процессе горизонтирования и блок управления горизонтированием. 2 с. и 1 з.п. ф-лы, 3 ил.
| НАНКИН Ю.А | |||
| И ДР | |||
| Станки шарошечного бурения | |||
| - М.: Недра, 1971, с.33-42, 103-105 | |||
| Буровой агрегат | 1988 |
|
SU1599513A1 |
| Самоходный станок шарошечного бурения | 1987 |
|
SU1507945A1 |
| СТАНОК ДЛЯ БУРЕНИЯ СКВАЖИН | 1994 |
|
RU2081287C1 |
| БУРИЛЬНО-КРАНОВАЯ МАШИНА | 1992 |
|
RU2019664C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ И ВЫРАВНИВАНИЯ ВЫШЕЧНОГО БЛОКА БУРОВОЙ УСТАНОВКИ | 1995 |
|
RU2083794C1 |
| US 4022284 А, 10.05.1977. | |||
