1
Изобретение относится к устройствам преобразования сигналов измерительных преобразователей перемещений и может «быть использовано в отс- j четно-измерительных системах угловых ,и линейных перемещений для станков с программным управлением и кОорди- . натно-измерительных машин.
Известен интерполятор, содержащий fQ суммирующие и множительные блоки 1 .
В этом устройстве синусно-косинусные сигналы преобразователя перемещения перемножаются на квадратурные сигналы генератора фиксированной частоты в умножителях, выходные сигналы которых суммируются и сумматоре и фильтруются фильтром.
Невысокая точность множительных устройств, а также необходимость уз- 2Q копрлосной фильтрации снижает точность и; вносит фазовые искажения.
Наиболее близким техническим решением к предлагаемому является интерполятор для измерительных пре- 25 образователей перемещения, содержа- щий синусно-косинусный измерительный преобразователь перемещения, первый и второй блоки выделения дуля, входы которых соединены соответственно с первым и вторым выходами синусно-косинусного измерительного преобразователя перемещений, первый и второй двухвходовые сумматоры, входы которых соединены с первым ивторым выходами синусно-косинусного измерительного преобразователя перемещения, а выходы - со входами третьего и четвертого блоков выделения модуля, реверсивный счетчик, выходы которого являются выходами интерполятора, блок компараторов, выходы которого соединены со входами реверсивного счётчика, блок преобразования амплитуды входного сигнала в постоянное напряжение 2j .
Недостатками этого интерполятора является невысокая точность и ограниченная величина коэффициента интерполяции. Действительно, треугольное напряжение формируется в устройстве с помощью блоков выделения модуля и сумматора по алгоритму (sinwt) - (cos wt). Неточность интерполирования обуславливается нелинейностью треугольного напряжения. Эта нелинейность равна +4% и прямо вязана с точностью интерполяций.
Цель изобретения - повышение точности й коэффициента интерполяции.
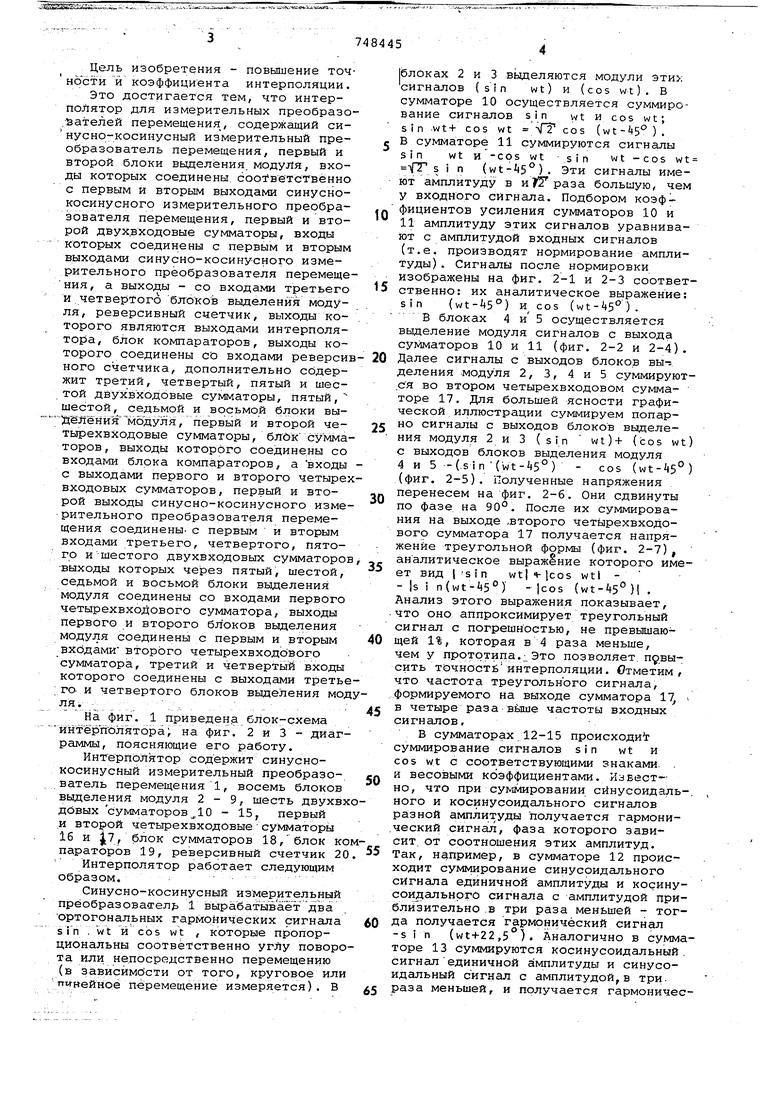
Это достигается тем, что интерполятор для измерительных преобразо/зателей перемещения, содержащий синусно-косинусный измерительный преобразователь перемещения, первый и второй блоки выделения, модуля, входы которых соединены соответственно с первым и вторым выходами синуснокосинусного измерительного преобразователя перемещения, первый и второй двухвходовые сумматоры, входы которых соединены с первым и вторым выходами синусно-косинусного измерительного преобразователя перемещения, а выходы - со входами третьего и четвертого блоков выдёленй я модуля, реверсивный счетчик, выходы которого являются выходами интерполятора, блок компараторов, выходы которого соединены со входами реверсивного счетчика, дополнительно содержит третий, четвертый, пятый и шестой Двухвходовые сумматоры, пятый, шестой, седьмой и восьмой блоки вы ;ц Яёнйя модуля, первый и второй четырехвходовые сумматоры, блбк сумматоров, выходы которого соединены со входами блока компараторов, а входы с выходами первого и второго четырехвходовых сумматоров, первый и второй выходы синусНо-косинусного измерительного преобразователя перемещения соединены- с первым и вторым входами третьего, четвертого, пятого и шестого двухвходовых сумматоров, выходы которых через пятый, шестой, седьмой и восьмой блоки выделения модуля соединены со входами первого четырехвходового сумматора, выходы первого и второго блоков вьщеления модуля соединены с первым и вторым вхбдами второго четырехвходЬвого сумматора, третий и четвертый входы которого соединены с выходами третье;го и четвертого блоков выделения модуля,- , . . ..л , . - На фиг. 1 приведен блок-схема йнтёрпблятора; на фиг. 2 и 3 - диаграммы, поясняющие его работу.
Интерполятор содержит синуснокосинусный измерительный преобразователь перемещения1, восемь блоков выделения модуля 2 - 9, шесть двухвходовых сумматоров,О - 15, первый и второй четырехвходовые-сумматоры 16 и jt, блок сумматоров 18, блок компараторов 19, реверсивный счетчик 20.
Интерполятор работает следующим образом.
Синусно-косинусный измерительный преобразователе 1 вырабатываетдва Ортогональных гармонических сигнала sin . wt и cos wt , которые пропорциональны соответственно угЛу поворота или непосредственно перемещению (в зависймости от того, круговое или пинейное перемещение измеряется). В
748445
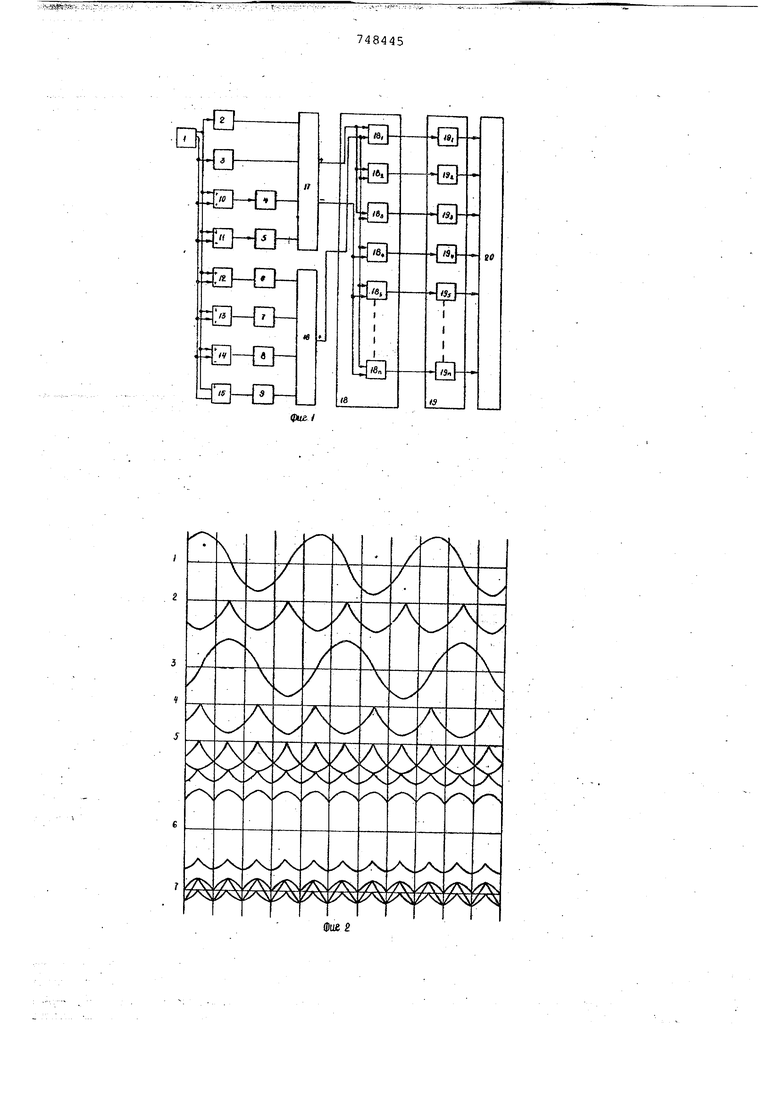
|блоках 2 и 3 выделяются модули сигналов (sin wt) и (cos wt) , В сумматоре 10 осуществляется суммирование сигналов sin wt и cos wt; sin -wtH- cos wt r cos (wt-t5 ). В сумматоре 11 суммируются сигналы sin wtH-cpswt sin wt-coswt Т s i n (wt-iS) . Эти сигналы имеKiT амплитуду в и75 раза большую, чем у входного сигнала. Подбором коэффициентов усиления сумматоров 10 и 11 амплитуду этих сигналов уравнивают с амплитудой входных сигналов (т.е. производят нормирование амплитуды) . Сигналы после нормировки изображены на фиг. 2-1 и 2-3 соответственно: их аналитическое выражение: sin (wt-45°) и cos (wt-tS).
В блоках 4 и 5 осуществляется выделение модуля сигналов с выхода сумматоров 10 и 11 (фиг. 2-2 и 2-4). Далее сигналы с выходов блоков выт деления модуля 2, 3, 4 и 5 суммируют ся во втором четырехвходовом сумматоре 17. Для большей ясности графической иллюстрации суммируем попарно сигналы с выходов блоков выделения модуля 2и 3 (si. n wt)-f (cos wt С выходов блоков выделения модуля 4 и 5 -(.sin (wt-itS) - cos ( (фиг. 2-5). Полученные напряжения перенесем на фиг. 2-6. Они сдвинуты по фазе, на 90°. После их суммирования на выходе .второго четьарехвходового сумматора 17 получается напряжение треугольной формы (фиг. 2-7), аналитическое выражение которого имеет вид Isin wt|4-lcos wtl - Is i n(wt-45°) - ICDS (wt-i(5°)i . Анализ этого выражения показывает, что оно аппроксимирует треугольный сигнал с погрешностью, не превышающей 1%, которая в 4 раза меньше, чем у прототипа. позволяет. П9.высить точности интерполяции. Отметим , что частота треугольного сигнала, формируемого на выходе сумматора 17 в четыре раза выше частоты входных сигналов,
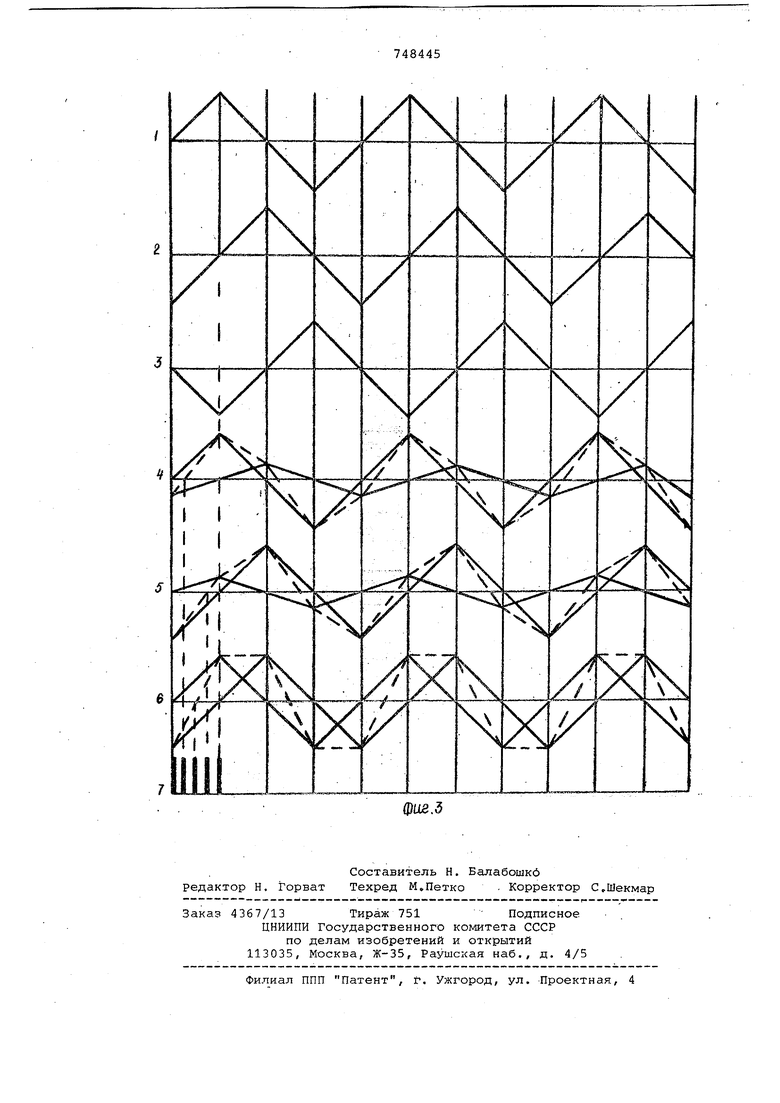
В сумматорах Д2-15 происходи г суммирование сигналов sin wt и cos wt с соответствующими знаками. . и весовыми коэффициентами. Известно, что при суммировании сйнусоидаль ного и косинусоидального сигналов разной амплитуды получается гармони.ческий сигнал, фаза которого зависит, от соотношения этих амплитуд. Так, например, в сумматоре 12 происходит суммирование синусоидального сигнала единичной амплитуды и косинусоидального сигнала с амплитудой приблизительно .в три раза меньшей - тогда получается гармонический сигнал -S in (wt-b22,5 ). Аналогично в суммторе 13 суммируются косинусоидальный сигналединичной амплитуды и синусоидальный сигнал с амплитудой,в три. раза меньшей, и получается гармоничекий сигнал sin (wt+67,5), в сумма торе 14 суммируются синусоидальный нал единичной- амплитуды и инвертиро ванный косинусоидальный сигнал с амплитудой, в три раза меньшей и по лучается гармонический сигнал sin {wt-22,5®); в сумматоре 15 су мируются инвертированный косинусоидальный сигнал единичной амплитуды и синусоидальный сигнал с амплитудо в три раза. меньшей и получается гар монический сигнал sim (wt-t,). Сигналы с выходов блоков выделения модуля 6-9 суммируются в первбм четырехвходовом сумматоре 16, После их суммирования получается сигнал треугольной формы, аналитическое вы .ражение которого имеет вид Is i п (wt-22,5°) Is I п (wt+67,5°)-I sin, (wt + 22,5) - j sin (wt-67,5° Частота этого треугольного сигнала в четыре раза выше частоты входных сигналов, а линейность, как было показано ранее, выше, чем у прототипа. Треугольный сигнал с выхода сумматора 16 сдвинут по фазе на 90 относительно аналогичного треугольного сигнала (фиг. 3-7) с прямого выхода сумматора 17.. .. Таким образом, после ряда преобр зований входные сигналы измерительн преобразователя преобразованы в два треугольных сигнала, сдвинутых по фазе на 90, и с четырехкратным умн жением по частоте. Эти сигналы в ув личенном масштабе изображены на фиг. 3-1 и 3-2. На фиг. 3-3 показан инвертированный сигнал с инверсного выхода сумматора 17. Далее эти сигналы поступают на входы блока сумма торов 18, состоящего из п сумматоров в каждом из которых происходит суммирование с разными весовыми коэффициентами соответствующих двух из трех треугольных сигналов,. После суммирования образуются ломанйые линии (см. пунктирные линии на фиг. , 3-4, 3-5 и 3-6). Формы этих ломанных линий и места их перехода через нулевую линию зависят от того, какие треугольные сигналы (инвертированные или неинвертированные) и с какими весовыми коэффициентами суммируются Моменты перехода ломанных линий через нуль фиксируются компараторами в блоке 19 (фиг. 3-7) и подсчитываются в счетчике 20. На фиг. 3 показано образование импульсов с частотой большей частоты треугольного сигнала в п раз, где п - число сумматоров в блоке 18. Таким образом коэффициент интерполяции сигналов Измерительных преобразователей перемещения в предлагаемом интерполяторе равен 4п, т.е. больше чемв прототипе. Более высокая точность предлагаемого интерполятора обеспечивается более высокой линейностью по сравнению с прототипом формируемого треугольного сигнала . Формула изобретения Интерполятор для измерительных преобразователей перемещения, содержащий синусно-косинусный измерительный преобразователь перемещения, первый и второй блоки выделения модуля, входы которых соединены соответственно с первым и вторым выходами синусно-косинусного измерительного преобразователя перемещения, первый и второйД1вухвходовые сумматоры, входы которых соединены с. первым и вторым выходами синуснокосинусного измерительного преобразователя перемещения, а выходы со входами третьего и четвертого блоков выделения модуля, реверсивный счетчик, выходы которого являются выходами интерполятора, блок компараторов ,, выходы которого соединены со входами реверсивного счетчика, отличающийся тем, что, с целью повышения точности и увеличения коэффициента интерполяции, он содержит третий, четвертый, пятый и шестой двухвходовые сумматоры, пятый, шестой, седьмой и восьмой блоки выделения модуля, первый и второй четырехвходовые сумматоры, блок сумматоров, выходы которого соединены со входами блока компараторов, а входы - с выходами первого и второго четырехвходовых сумматоров, первый и второй выходы синуснокосинусного измерительного преобразователя перемещения соединены с первым и вторым входами третьего, четвертого, пятого и шестого двухвходовых сумматоров, выходы которых через пятый, шестой, седьмой и восьмой блоки выделения модуля соединены со входами первого четырехвходОвого сумматора, выходы первого и второго блоков выделения модуля соединены с первым и вторым входами второго четырехвходоЁого сумматора, третий и четве|ртый входы которого соединены -с выходами третьего и четвертого блоков выделения модуля. Источники информации, принятые во внимание при экспертизе 1.Патент Великобритании № 957916, кл. G 1А, опублик. 1964. 2.Патент ФРГ № 1945206, кл. G 01 D 5/245, опублик. 1972 (прототип).
748445

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля преобразователей угла поворота вала в код | 1982 |
|
SU1027749A1 |
| Преобразователь перемещения в код | 1980 |
|
SU911583A1 |
| Устройство для преобразования перемещений в фазу электрического сигнала | 1985 |
|
SU1244477A1 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ МНОГОФАЗНОГО ПЕРИОДИЧЕСКОГО СИГНАЛА | 1991 |
|
RU2017063C1 |
| Управляемый фазовращатель | 1987 |
|
SU1479889A2 |
| Растровый интерполятор | 1978 |
|
SU769492A1 |
| Фильтр для обработки сигналов синусно-косинусного фазовращателя | 1986 |
|
SU1417179A1 |
| Преобразователь перемещения в код | 1989 |
|
SU1656682A1 |
| Умножитель частоты гармонических сигналов | 1980 |
|
SU930574A2 |
| Преобразователь угловых перемещений в код | 1978 |
|
SU926703A1 |
А
А
А
А
АА
/ 7
А
А
А
А
ТФЧ
