(5) ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЯ В КОД
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля преобразователей угла поворота вала в код | 1982 |
|
SU1027749A1 |
| Преобразователь перемещения в код | 1981 |
|
SU997064A2 |
| Интерполятор для измерительных преобразователей перемещения | 1978 |
|
SU748445A1 |
| Способ преобразования угла поворота вала в код и устройство для его осуществления | 1989 |
|
SU1713103A1 |
| Преобразователь угла поворота вала в код | 1985 |
|
SU1293842A1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2013 |
|
RU2533305C1 |
| ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЯ В КОД | 1991 |
|
RU2007027C1 |
| Преобразователь угла поворота вала в код | 1983 |
|
SU1088045A1 |
| Преобразователь угла поворота вала в код | 1977 |
|
SU732954A1 |
| Преобразователь угла поворота вала в код | 1978 |
|
SU781866A1 |
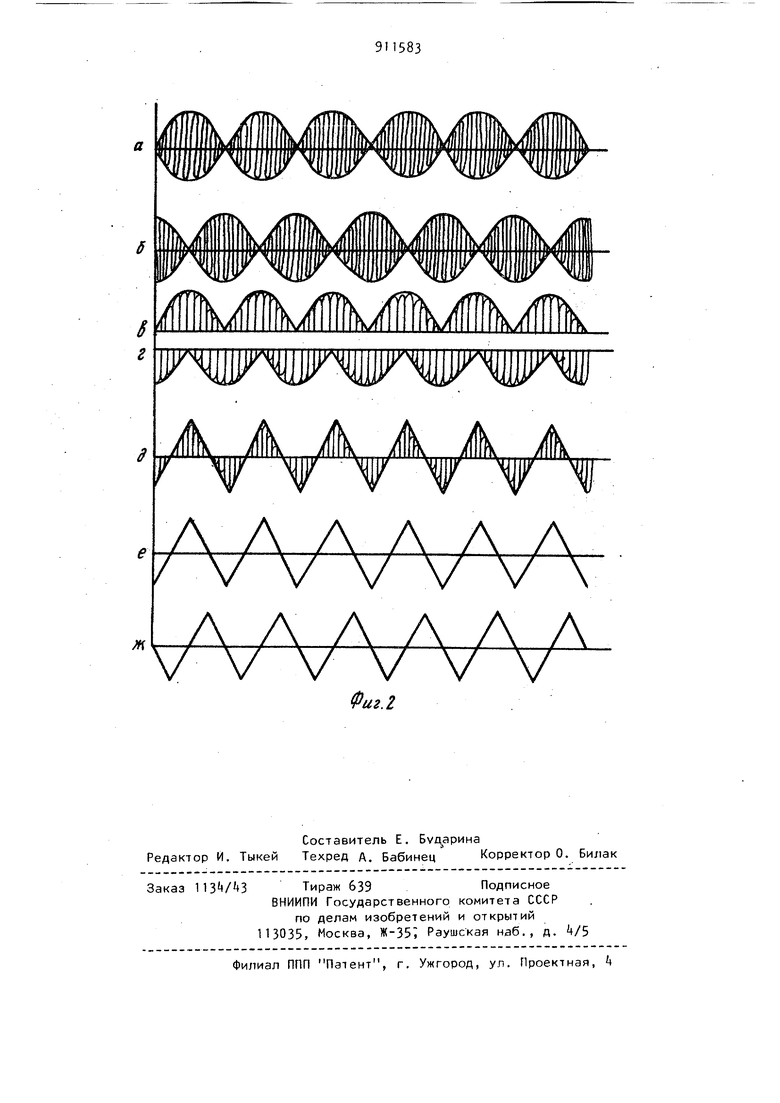
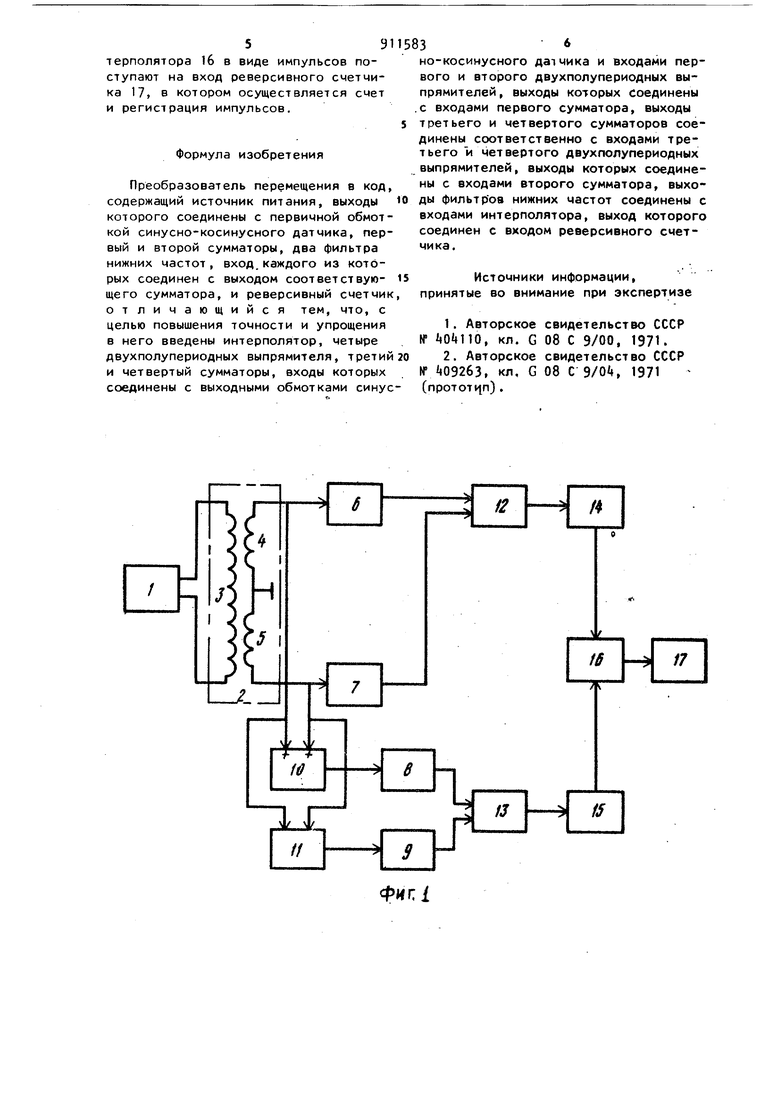
Изобретение относится к автоматике и вычислительной технике и может быть использовано в преобразователях угловых и линейных перемещений в цифровой код. Известен преобразователь перемещения, содержащий синусно-косинусный датчик, фазочувствительные детекторы, модуляторы, источник напряжения, два сумматора и два фильтра р 3- - Недостатками преобразователя являются невысокая точность и сложность. Известен преобразователь перемещения в код, содержащий синусно-косинус ный датчик, источник питания, подключенный к первичной обмотке синуснокосинусного датчика, две пары последо вательно соединенных сумматоров и фильтра нижних частот и компаратора, выходы которых соединены с входами триггера, соединенного через ключ с входом реверсивного счетчика, фазочувствительные детекторы с блоком управления, формирующим опорные сигналы для детекторов .2, Недостатками преобразователя являются сложность и невысокая точность. Цель изобретения - повышение точности и упрощение преобразователя. Поставленная цель достигается- тем, что в преобразователь перемещения в код, содержащий источник питания, выходы которого соединены с первичной обмоткой синусно-косинусного датчика, первый и второй сумматоры, два фильтра нижних частот, вход каждого из которых соединен с выходом соответствующего сумматора, и реверсивный счетчик, введены интерполятор, четыре двухполупериодных выпрямителя, третий и четвертый сумматоры, входы которых соединены с выходными обмотками синусно-косинусного датчика и входами первого и второго двухполупериодных выпрямителей, выходы которых соединены с входами первого сумматора, выходы третьего и четвертого сумматоров соединены соответственно с входами третьего и четвертого двухполупериодных выпрямителей, выходы которых соединены с входами второго сумматора выходы фильтров нижних частот соединены с входами интерполятора, выход которого соединен с входом реверсивного счетчика. На фиг. 1 изображена блок-схема преобразователя перемещения в код; на фиг. 2 - временные диаграммы си1 налов. Преобразователь содержит источник 1питания, синусно-косийусный датчик 2с первичной обмоткой 3 и выходными синусной k и косинусной 5 обмотками, двухполупериодные выпрямители 6-9 сумматоры 10-13 фильтры I и 15 нижних частот, интерполятор 16 и реверсивный счетчик 17. Преобразователь работает следующим образом. Источник 1 питает первичную обмотку 3 синусно-косинусного датчика 2. Напряжения синусной k и косинусной 5 выходных обмоток соответственно пропорциональны выражениям: о SinaL- Sin()t; CosoC- Sintfi;t где ot - угол поворота или перемещени подвижной части датчика 2; W - угловая частота напряжения питания датчика 2. Графическое изображение этих си1- налов представлено на фиг. 2а и фиг. 26. Эти напряжения поступают на двухполупериодные выпрямители 6 и 7, на выходе которых образуются сигналы (фиг. 2,1): /Sino -Since/t/ /Cosd-Sinwt/ Выпрямитель 7 выполнен так, что на его выходе получается сигнал, равный абсолютной величине сигнала (2) с обратным знаком. Сигналы (3) и () суммируются в сумматоре 12, на выходе которого образуется сигнал (фиг. 2(Э) /Sin(sjt / (Sin.oi/- ) (5) Огибающая сигнала после суммирования имеет треугольную форму, а по час тоте в 2 раза выше. Демодуляция этой огибающей осуществляется обычным фильтром нижних частот (сигнал после фильтрации изображен на фиг. 2еД Аналогичные преобразования пре-терпевают сигналы синусно-косинусного датчика 2 в блоках 8, 9, Ю, 11, 13 и 15. В сумматоре 10 происходит суммирование сигналов (1) и (2), поэтому сигнал на его выходе пропорционален ( Co5oOSin(jyt (et- .,-. )А Sinoe/t В сумматоре 11 (в некотором практически осуществляется вычитание, так как один из сигналов подается на инвертирующий вход) получается сигнал ( Cosc)Sina;t V2Sin(oi45) Sin(:yt(7) Как видно, амплитуды суммарных сигналов имеют амплитуду в-/Т раза большую, чем у входного сигнала. Подбором коэффициента усиления сумматоров 10 и 11 амплитуду этих сигналов уравновешивают с амплитудой сигналов (1) и (2), т. е. производят нормирование амплитуды. В двухполупериодных выпрямителях 8 и 9 осуществляется выделение модулей сигналов (6) и (7) с выхода сумматоров 10 и 11. /Sin()Sin()t/ и /Cos(,oL-45)Sincyt/ В сумматоре 13 суммируются сигналы (8) и получается сигнал /Sinoe;t/(/Sin(eC-45 )/ CosW-4y.V Фильтруя несущую частоту сигнала (9) в фильтре 15, получаем на его выходе (также как на фиг. 26) треугольный сигнал, который, однако, сдвинут относительно него на 90°. Таким образом на выходах фильтров 1 и 15 образуются два треугольных сигнала удвоенной частоты, сдвинутых Оба руг относительно друга на 90 сигнала поступают на интерполятор 16, где может быть определено направление перемещения и внутришаговое деление (интерполяция). Выходные сигналы ин591
терполятора 1б в виде импульсов поступают на вход реверсивного счетчика 17, в котором осуществляется счет и регистрация импульсов.
Формула изобретения
Преобразователь перемещения в код, содержащий источник питания, выходы которого соединены с первичной обмоткой синусно-косинусного датчика, первый и второй сумматоры, два фильтра нижних частот, вход.каждого из которых соединен с выходом соответствующего сумматора, и реверсивный счетчик отличающийся тем, что, с целью повышения точности и упрощения в него введены интерполятор, четыре двухполупериодных выпрямителя, третий и четвертый сумматоры, входы которых соединены с выходными обмотками синус
36
но-косинусного датчика и входами первого и второго двухполупериодных выпрямителей, выходы которых соединены с входами первого сумматора, выходы
третьего и четвертого сумматоров соединены соответственно с входами третьего и четвертого двухполупериодных выпрямителей, выходы которых соединены с входами второго сумматора, выходы фильтров нижних частот соединены с входами интерполятора, выход которого соединен с входом реверсивного счетчика.
Источники информации,
принятые во внимание при экспертизе
/7
ГЧГЖГД.Г Г1Г111
л л л л л л
V V V V V V
А А
Nf ;н|Г Л Л Л
V V
Фиг.г
