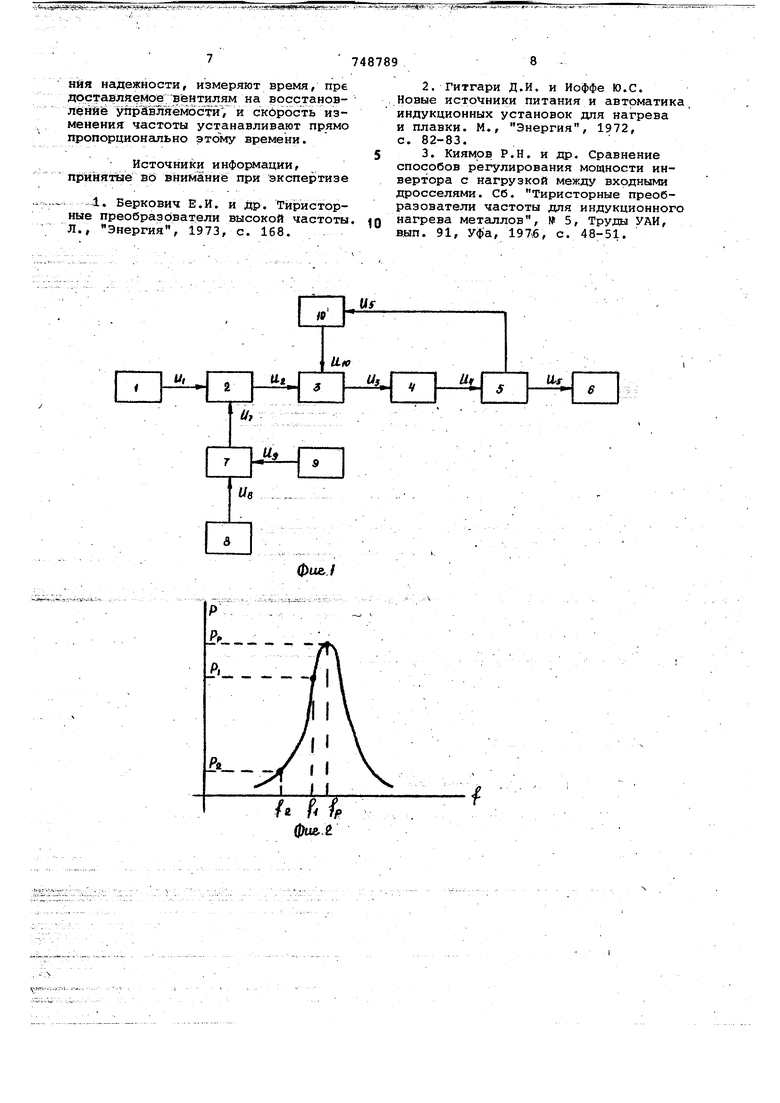
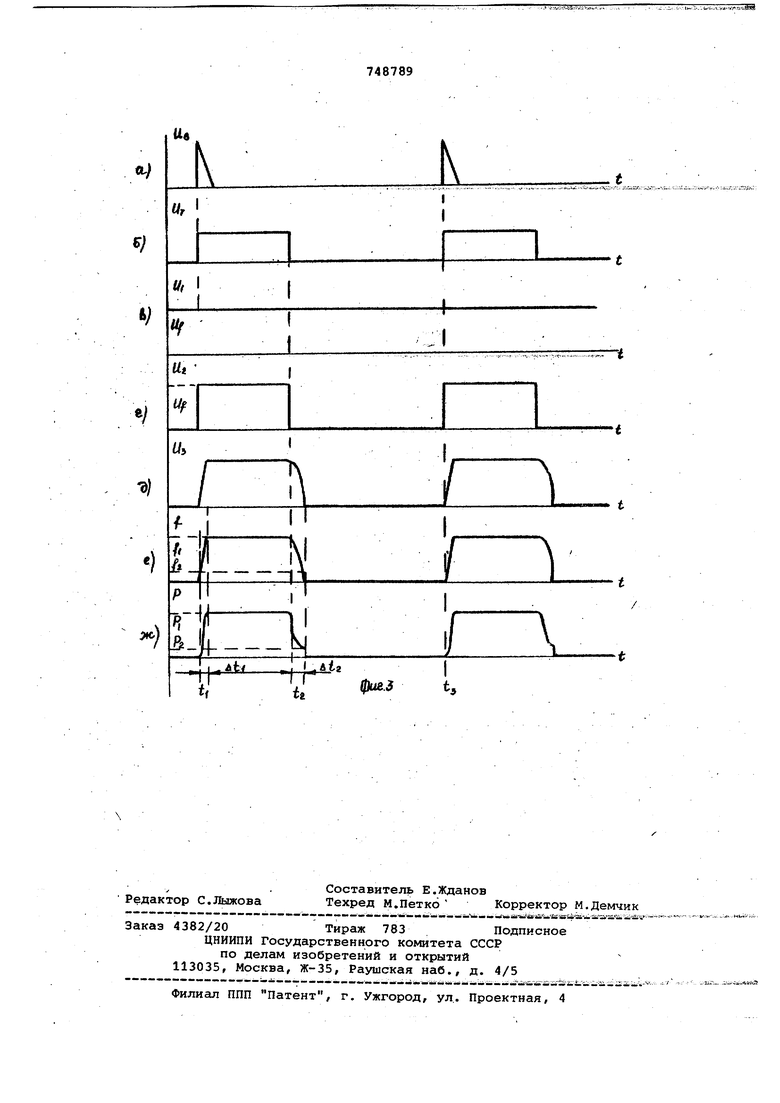
, Изобретение относитсй к электротехнике и может применяться в источниках питания инду1 ционных электротермических установок. Известны, способы регулирования выходной мощности тиристорного инвертора, работающего на колебательный контур, путем изменения выходной частоты инвертора. При этом использу ют зависимость импеданса нагрузочного колебательного контура от частоты напряжения на нём 1 , 2 и 3 Недостатком известных способов - регулирования.является снижение КПД при регулировании мощности Г Наиболее близким к изобретению по технической сущности является спо соб, при котором урегулирование выходной мощности осуществляют путем изменения частоты управдяющих сигналов на вентили инвертора 3. Недостатком указанного способа является низкий КПД, так как при т.аком способе регулирования выходная (полезная) мощность инвертора снижается, а потери в инверторе остаются, примерно, постоянными. Это объясняет ;:я тем, что при регулировании уменьшается выходное напряжение йнвертоipa, а выходной ток, меняется незначи тельно. Кроме того, при уменьшении мощности по известному способу уменьшается и соs-f нагрузки, а следовательно, вОзрастают потери в ней и в подводящих проводах. Цель изобретения - повышение КПД. Поставленная цель достигае тся Тем, что в способе регулирования выходной мощности тиристорного инве1Е)тора, состоящим в том, что изменяют частоту управляющих импульсов на вентили инвертора, частоту управляющих импульсов изменяют от величины, соответствующей минимальной мощности, до величины, соответствующей максимальной мощности, и поддерживают необходимое время на заданном уровне, затем изменяют частоту управляющих импульсов до величины, соответствующей минимальной мощности, и прекращают подачу управляющих импульсов и после необходимой вьадержки времени операции Периодически повторяют, причем соотношение между временем работы инвертора на частоте, соответствующей максимальной мощности, и бременем, когда управляющие сигналы на вентили инвертора не поступают, устанавливают в соот- ветствии с заданной мощностью. Кроме того, при регулировании с целью повышения надежности измеряют напря жение на вентилях инвертора и скорость изменения частоты устанавлива ют обратно пропорционально этому напряжению, а также при регулирова ййй целью пЪвышёнйя наДежнбс и измеряют время, предоставляемое вен тилями на восстановление управляемости, и скорость изменения частоты устанавливают прямо пропорционально этому времени. На фиг. 1 приведена блок-схема устройства, реализующая способ, на фиг. 2 - зависимость мощности, выде ляемой в колебательном контуре нагрузки, от частоты напряжения на не на фиг. 3 - кривые, поясняющие прин цип регулирования по данному спосо бу. Устройство (см.фиг.1) содержит последовательно соединенную цепь из частотно-задающей цепи 1, ключа 2, управляемого инерционного звена 3, задающего генератора 4, инвертора 5 и нагрузки 6. Вход управления ключа 2 соединен.через модулятор 7 скважности со вторым генератором 8 и задатчиком 9 мощности. Инерционное звено 3 через устройство управления 10 соединено с инвертором 5. Выходная частота инвертора 5, а следовательно, мгновенная мощность, выделяемая в нагрузке б, определяется частотой задающего генератора 4. Напряжение Ug на выходе генерато ра 8 Показано на фиг.За. Частота Ug выбирается на несколько порядков (3-10) ниже частоты задающего генер тора 4. Модулятор 7 скважности преобразует импульсы UQ в прямоугольны (фиг.36), скважность которых зависит от величины сигнала Ug с задатчика 9 мощности. Изменяя скважность импульсов Uy, поступающих на вход управления ключа 2, йзменяк) йрёмя прерывания ключа 2 в закрытом и открытом состояниях, а тем самым, время, в течение которого частота, задающая цепь 1, через инерционное звено 3 подключена к задающему генератору 4. Частотно-задающая цеп 1 предста вляет собой регулируемый источник постоянного напряжения (фиг.Зв), выходное напряжение U-, которого определяет амплитуды выход . ных напряжений } ключа 2 и U инер ционного звена 3 (фиг.Зг ид). . . Задающий генератор 4 выполнен так, что его частота Р пропорционал на, в определенном диапазоне, величине напряжения инерционного звена 3. При уменьшении частоты Ч до величины (фиг. Зе) задающий генератор 4 прекращает генерирование коле баний, а следовательно, инвертор 5 выключается. Управляемое инерционное звено 3 введено в устройство для повышения надежности работы инвертора. При отсутствии инерционного звена 3 частота задающего генератора 4, а следовательно, и частота выходного напряжения Ug инвертора 5 изменялись бы скачком. Это приводило бы к скачкообразному изменению мощности, выделяемой в нагрузке 6. При скачкообразном уменьшении мощности в нагрузке б энергия, запасенная во входном Дросселе инвертора 5, переходит в конденсаторы, установленные в его схеме, что вызывает рост напряжения на них, а следовательно, рост напряжения на вентилях инвертора и сокращение времени, предоставляемого вентилем на восстановление управляемости, что резко снижает надежность инвертора. Для надежной работы инвертора cниkeниe мощности необходимо производить с низкой скоростью. Но это ведет к увеличению времени переходного процесса и снижению эффектив- ности регулирования. Поэтому для уменьшения времени переходного процесса при сохранении надежности инвертора целесообразно при снижении мощности контролировать параметр инвертора, определяющий его надежность , и скорость изменения частоты задающего генератора 4 устанавливать в соответствии с этим параметром. В случае, если параметром, определяющим надежность инвертора, является напряжение на его вентилях, то с помощью устройства 10 управления измеряют указанное напряжение, и скорость изменения напряжения на выходе инерционного звена 3, а следовательно, и частоты задающего генератора устанавливают обратно пропорционально напряжению на вентилях. Это ведет к стабилизации напряжения на вентилях инвертора и повышению надежности преобразователя. , В случае, если параметром, определяющим надежность инвертора, явля 1ся время, предоставляемое на восстановление управляемости, то с помощью устройства 10 управления измеряют указанное время,и скорость изменения напряжения на выходе инерционного звена 3, а следовательно, и частоты задающего генератора устанавливают прямо пропорционально времени предоставляемого вентиля на восстановление управляемости. При увеличении мощности возрастания напряжения на элементах инвертора не происходит, поэтому для снижения времени переходного процесса целесообразно скорость изменения частоты выбирать более высокой, чем при Уменьшении мощности. В момент t, (фиг.З) происходит з мыкание ключа 2 и напряжение на его выходе становится равным Ц. За вре мя At частота задающего reHepaTota устанавливается равной f, , соответствующей максимальной мощности инвертора. В момент tj, происходит раз мыкание ключа 2 и напряжение на его выходе становится равным О. Это при водит к тому, что частота задающег(/ генератора 4 за время at уменьшает ся до величины f , генератор 4 прекращает генерирование колебаний и инвертор 5 выключается. Причем скорость изменения частоты в течение времени t t t + Atj пропорциональна времени, предоставляемому вентилям на восстановление управляемости или обратно пропорциональна напряже нию на вентилях. В момент ключ 2 опять включается и указанные процессы повторяются. Имея зависимость выходной частот инвертора от времени (фиг.Зе) и зависимости мощности, выделяемой в нагрузке, от частоты напряжений на ней (фиг.2), построить зависимость мгновенной мощности инвертора от времени (фиг.Зж). Среднее значение мощности за период изменения частоты, считая ди. и At2, , равно где , ,-t - период изменения часто ты инвертора. Изменяя задатчиком 9 мощности соотн шение t и Т, регулируют среднее зн чение выгодной мощности инвертора. Период изменения выходной частоты инвертора выбирают много меньше тепловой постоянной времени нагрузки. Например, тепловая постоянная времени индукционной печи ИСТ-0,16 составляет.несколько часов, а период изменения частоты f выбирается порядка нескольких десятков секунд. Поэтому колебания мгновенной мощнос ти инвертора относительно среднего значения никак не сказываются на тепловых процессах в нагрузке. Если на максимальное значение мощности не накладывается ограни-: чений со стороны нагрузки и инверто ра, то значение Р, и соответственно f, выбирают равным Рр , fp (фиг. 2 Если по каким-либо причинам, например технологическим, недопустимо значительное превышение над f, то выбирают f, ; fp . При этом то же самое значение Р(.р будет получено при меньших значениях.отношений /Т и колебания мгновенной мощности над средним ее значением будут уменьшены. КПД инвертора при данном способе регулирования практически не зависи от глубины регулирования. Действительно, в интервале времени t,t tj, мощность потерь Р,,, в инверторе примерно равна где Т, - КПД инвертора при мощности . . В интервале времени (, t инвертор не работает и мощность потерь в нем равна 0. Поэтому средняя мощность потерь за период изменения частоть потерь период равна р li ncp t т,, т vip г, кпд инвертора при регулировании мощности /ц равен Р р + р ср Ч1Ср Т.е. КПД инвертора при предлагаемом способе регулирования не зависит от глубины регулирования и равен КПД при номинсшьной мощности. Таким образом, данный способ регулирования выходной мощности тиристорного инвертора обеспечивает плавное регулирование средней мощности с высоким значением КПД. Формула изобретения 1.Способ регулирования.выходной МС8ЦНОСТИ тиристорного инвертора, работающего на колебательный контур, состоящий в том, что изменяют частоту управляющих импульсов вентилей инвертора, отличающийся тем, что, с целью, повышения КПД, . частоту управляющих импульсов изменяют от величины, соответствующей минимсшьнЬй мощности, до величины, соответствующей максимальной мощности, и поддерживают необходимое время на заданном уровне, затем изменяют частоту управляющих импульсов до величины, соответствующей минимальной мощности I и прекршцают подачу управляющих импульсов и после необходимой ь ндержки времени операции периодически повторяют, причем соотношение между временем работы инвертора на-: частоте, соответствующей максимальной мощности, и временем, когда упрайляющие импульсы на вентили инвертора не поступают, устанавливают в соответствии с заданной мощностью, 2.Способ ПОП.1, отличающийся тем, что, с целью повышения надежности, измеряют напряжение на вентилях инверторов и скорость изменения частоты устанавливают обратно пропорционально этому напряжению . 3.Способ ПОП.1, отличаюЩ и и с я тем, что, с целью повышеНЙЯ надежностиf измеряют время, пре дрставляемое вентилям на восстановление управляембстиУ и скорбеть изменения частоты устанавливают прямо пропорционально времени. Источники информации, прйнятае во внимание при экспертизе -1. Беркович Е.И. и др. Тйристорные преобразователи высокой частоты Л., Энергия, 1973, с. 168. 8 2. Гитгари Д.И. и Иоффе Ю.С. Новые источники питания и автоматика индукционных установок для нагрева и плавки. М., Энергия, 1972, с. 82-33. 3. Киямрв Р.Н, и др. Сравнение способов регулирования мощности инвертора с нагрузкой между входными дросселями. Сб. Тиристорные преобразователи частоты для индукционного нагрева металлов, № 5, Труды УДИ, вып. 91, Уфа, 197-6, с. 48-51.

| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь постоянного напряжения | 1984 |
|
SU1262660A1 |
| Устройство для управления автономным регулируемым инвертором | 1985 |
|
SU1272430A1 |
| Устройство для управления преобразователем с многоуровневым выходным напряжением для электропривода | 1986 |
|
SU1368948A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ГИРОСТАБИЛИЗАТОРОМ | 2008 |
|
RU2381451C1 |
| Многозонная индукционная нагревательная установка | 1983 |
|
SU1153397A1 |
| СИСТЕМА СТАБИЛИЗАЦИИ МОМЕНТА ВРАЩЕНИЯ СИЛОВЫХ ГИРОСТАБИЛИЗАТОРОВ | 2008 |
|
RU2382334C1 |
| Способ управления автономным инвертором | 1989 |
|
SU1735985A1 |
| Способ управления трехфазным регулируемым мостовым преобразователем | 1990 |
|
SU1721760A1 |
| Способ управления регулируемым преобразователем частоты с непосредственной связью | 1980 |
|
SU919037A1 |
| Способ управления непрерывной разливкой металла | 1987 |
|
SU1447553A1 |
А А
фиг..
