наковой длительности, продолжительность которых определяет величину выходного напряжения инвертора.
Однако спектр подобных выходных кривых содержит значительные по амплитуде паразитные гармонические составляющие низкого порядка, среди которых наиболее трудноустраняемой является пятая гармоника. Кроме того, обеспечение рационального режима работы преобразователей, нагруженных на асинхронные электродвигатели и регулируемых по частоте в широких пределах, сопровождаемого последовательным уменьшением количества выходных импульсов в выходной полуволне, осуществляется скачкообразно, что приводит к нежелательным броскам тока в силовых цепях инвертора и нагрузки в моменты перехода от одного поддиапазона регулирования к другому,
Цель изобретения - улучшение спектрального состава выходного напряжения преобразователя в процессе связанного регулирования частоты и величины напряжения, осуществляемого в диапазоне
г-FO П
выходных частот F0 -s-s1,6
путем плавного
безударного перехода от одного поддиапазона регулирования к другому.
Поставленная цель достигается тем, что согласно предлагаемому способу, при котором основные вентили разных фаз преобразователя периодически включают и выключают с взаимным фазовым сдвигом в 60 эл. град., при этом для каждого вентиля в течение одного полупериода от 0 до 180 эл.град. создают зону проводимости, в течение другого полупериода от 180 до 360 эл.град, создают зону закрытого состояния, внутри тактового интервала каждой зоны проводимости от 60 до 120 эл.град и внутри тактового интервала каждой зоны закрытого состояния от 240 до 300 эл.град. формируют соответственно сигналы выключения и включения вентилей (сигналы управления), количество которых последовательно уменьшается с ростом выходной частоты преобразователя F, причем на начальной выходной частоте F0 тактовые интервалы разбивают на четное л количество подинтервалов равной между собой длительности, в крайней правой части каждого из которых формируют указанные сигналы
управления, в диапазоне частот F0 - -к Fo в
центрах тактовых интервалов формируют разноименные с соответствующей зоной управления дополнительные сигналы управления с продолжительностью, равной
длительность тактовых подинтерва- 0.8
лов определяют как на каждой поло0
5
0
5
0
5
0
5
0
5
6F0n
вине тактового интервала начало каждого первого и конец каждого последнего тактового подинтервала синхронизируют соответственно с началом тактового интервала, с границами указанного дополнительного сигнала управления и с концом тактового
интервала, в диапазоне частот F0 - g- F0 внутри каждой половины тактового интервала формирование каждого 1-го, считая от правых отмеченных точек синхронизации, сигнала управления (каждого (И)-го сигнала управления, считая от левых отмеченных точек синхронизации) осуществляют при изменениивыходнойчастотыпреобразователя от F0 до FI . F0n(l-1)
причем, при изме«FI
2(21-3)(1-1 ) + 1 нении выходной частоты от F0 до
FQ п ( - 1) 2(2l-1)(i-1j-1 внутри каждого
тактового подинтервала формируют сигнал управления с длительностью
(()прир| р FI внутри, в крайней правой части (И)-п правых и (i-2)-n левых от середин отмеченных половин тактового интервала тактовых подинтервалов синтезируют сигналы управлениясдлительностью
,, 0,8(21-3). .
л - д с /I 1 в крайней правой части
D Го П I I j
отрезков, расположенных между указанными подинтервалами, формируют сигналы управления с продолжительностью (21-3)П-1)+11в
FO П F0 П
диапазоне частот в крайних
правых частях отмеченных половин каждого тактового интервала генерируют по одному сигналу управления с длительностью
1 - J.6 FF 6For,
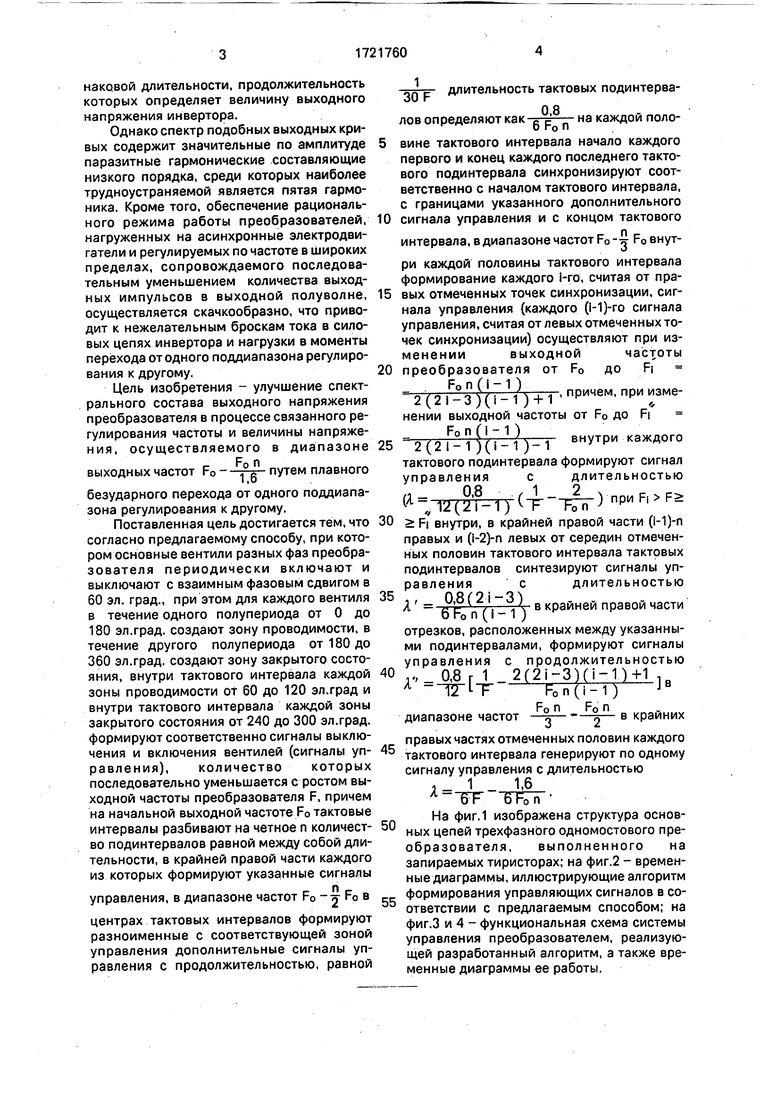
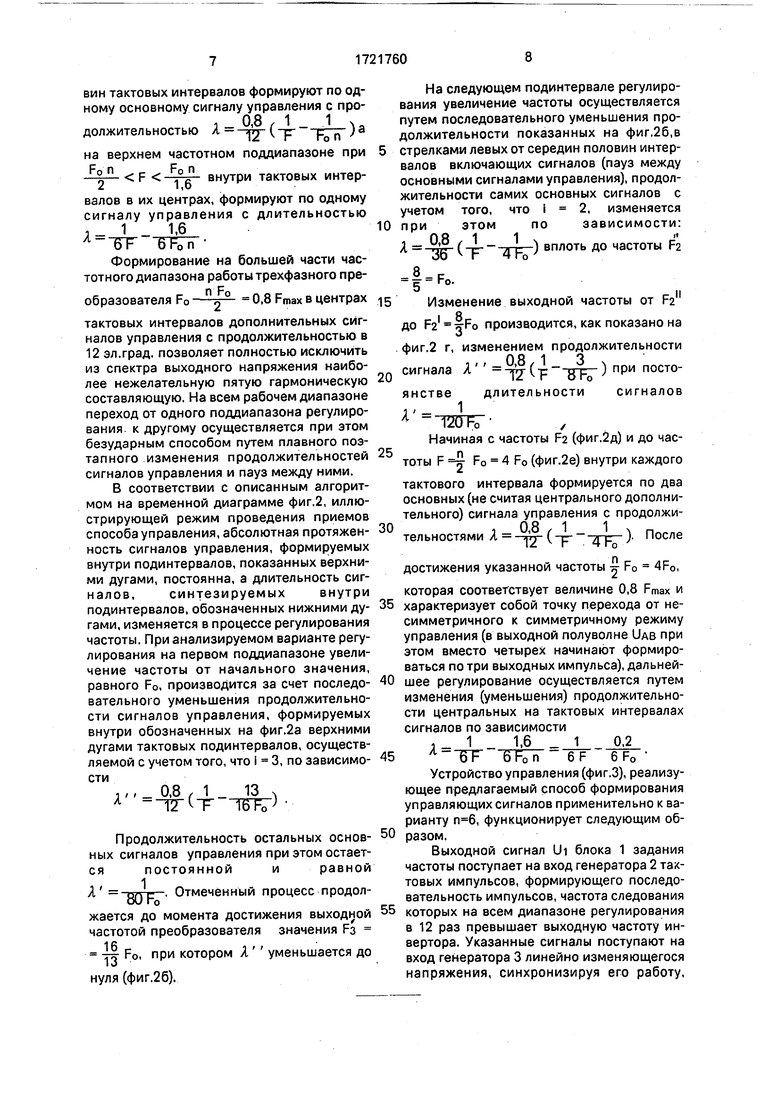
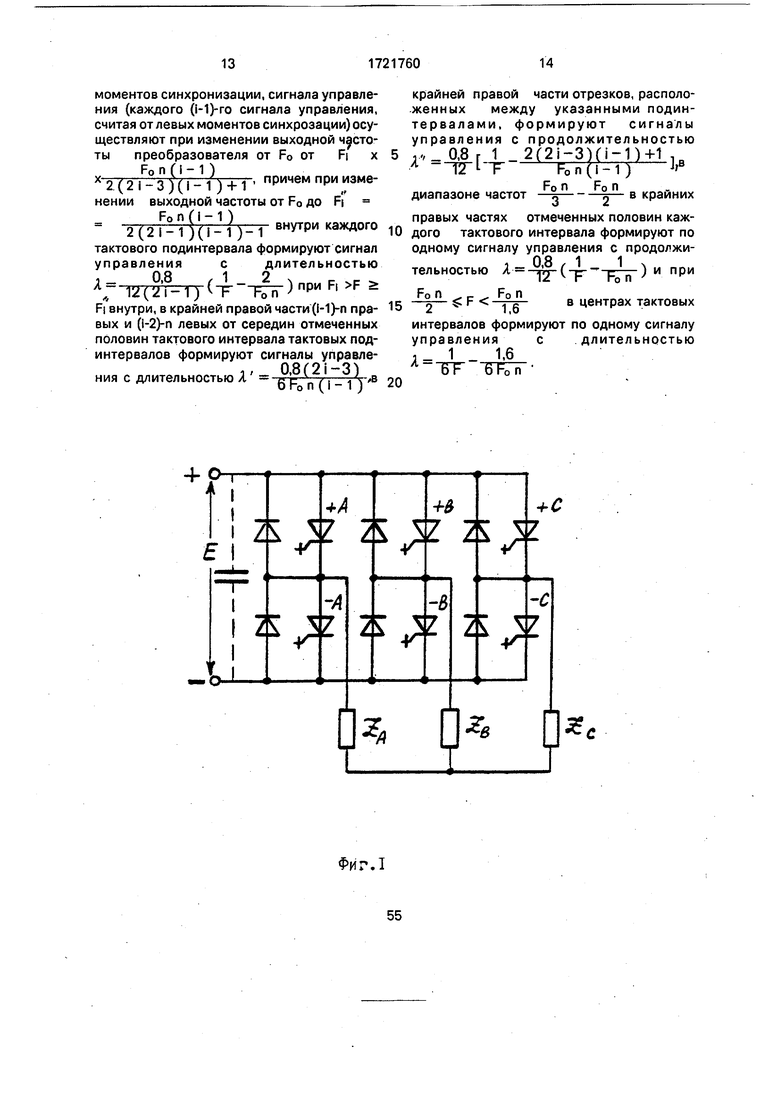
На фиг.1 изображена структура основных цепей трехфазного одномостового преобразователя, выполненного на запираемых тиристорах; на фиг.2 - временные диаграммы, иллюстрирующие алгоритм формирования управляющих сигналов в соответствии с предлагаемым способом; на фиг.З и 4 - функциональная схема системы управления преобразователем, реализующей разработанный алгоритм, а также временные диаграммы ее работы.
Я Временные диаграммы, представленные на фиг.2 и включающие циклограммы Uy зоны управления вентиля А и кривые полуволн линейного выходного напряжения инвертора UAB, иллюстрируют вариант уп- равления для п-8, при котором на начальной выходной частоте FO (фиг.2а) центральные шестидесятиградусные тактовые интервалы от 60 до 120 эл.град. в зоне проводимости вентилей и от 240 до 300 эл.град. в зоне закрытого состояния разбиваются соответственно на восемь подинтервалов, показанных на фиг.2 дугами,
продолжительностью - эл.град. каждый
П.
(т.е. соответственно в б эл.град.). При этом, в центральной части каждого тактового интервала, на участке протяженностью 12 эл.град. формируются дополнительные разноименные с соответствующей зоной уп- равления управляющие сигналы, в частности, включающие импульсы в зоне закрытого состояния. Внутри первой половины тактового интервала начало первого подинтервала и конец последнего подин- тервала засинхронизированы соответственно с началом тактового интервала и с левой границей указанного дополнительного сигнала управления. На второй половине каждого тактового интервала начало перво- го подинтервала синхронизировано с правой границей упомянутого сигнала управления, а конец последнего подинтервала - с концом тактового интервала. В крайней правой части каждого из упомяну- тых подинтервалов формируются включающие и выключающие вентили сигналы управления, изменением продолжительности которых регулируется величина выходного напряжения инвертора. Моментам формирования запирающих вентили импульсов на фиг.2 соответствует нулевой уровень сигналов Uy, а проводящему состоянию вентилей - положительное значение сигналов. Аналогично формированию запи- рающих сигналов на интервалах 60-120 эл.град. на тактовых интервала 240-300 эл.град. осуществляется синтезирование включающих вентили сигналов управления.
Общий диапазон связанного регулиро- вания величины и частоты выходного напряженияпреобразователяприрассматриваемом алгоритме несимметричного управления составляет FO - Tg - При с- FQ П
этом в диапазоне частот F0 регулирование частоты осуществляется за счет постоянной плавной вариации длительностей
пауз между основными сигналами управления и самих управляющих сигналов на близлежащих к серединам указанных половин тактовых интервалов участках. Процесс регулирования при этом проходит двухэтап- но, осуществляясь по двум основным опорным алгоритмам, граничные значения частот, переходных от одного диапазона регулирования к другому, определяются FonTl-lV
2(2i-3)(i-1)-M
Fo n (1 - 11 )c . il причем Fi
//
как
иР|
F;:
2(2i-1 )(i-1)1
для нечетных m и i у
1
для четных т, где m - количество формируемых основных сигналов управления внутри каждой половины тактовых интервалов.
На поддиапазонах регулирования, при которых Fi F Fj+1 внутри (в крайней правой части) всех тактовых подинтервалов формируются сигналы управления с продолжительностью
А 12(2р-1)т-тЈг) изменение частоты (длительности тактового интервала) производится при этом за счет изменения продолжительности ближайших слева к центрам указанных половин Тактовых интервалов импульсов кривой линейного выходного напряжения, соответствующим на интервале 60-120 эл.град. паузам между основными сигналами управления, показанным на фиг.2 стрелками сверху. Их продолжительность в момент достижения выходной частотой преобразователя значений FI уменьшается до нуля. ,.
В диапазонах частот FI F FI внутри (М)-п правых и (l-2)-n левых от отмеченных выше центров половин тактовых интервалов тактовых подинтервалов формируются основные сигналы управления с постоянной продолжительностью, определенной 0.8(21-3) 12F0n(i-1)
В крайней правой части интервала, расположенного между указанными под- интервалами, формируется сигнал управления регулируемой длительности ,,, 0,8 г 1 2C2I-3
Я -VTi--F
путем изменения которой на данных поддиапазонах регулируется выходная частота преобразователя. Уменьшение значения Я до нуля наблюдается на частотах FI. В поддиапазоне повышенных выходных час«с U ,- U. .
тот преобразователя F0 у - F0 у в крайней
правой части каждой из отмеченных полокак
Я iM/iri i ел onuu i
-3}(i-n+1, (1-1)
вин тактовых интервалов формируют по одному основному сигналу управления с проj 0,8 , 1 1 А-Т2-(тг-F57
должительностью
)
на верхнем частотном F°n
поддиапазоне при внутри тактовых интер2 1,6 валов в их центрах, формируют по одному сигналу управления с длительностью
;- 1 - J.6 6F0n
Формирование на большей части частотного диапазона работы трехфазного преобразователя FO -«- 0-8 Fmax B центрах
тактовых интервалов дополнительных сигналов управления с продолжительностью в 12 эл.град. позволяет полностью исключить из спектра выходного напряжения наиболее нежелательную пятую гармоническую составляющую. На всем рабочем диапазоне переход от одного поддиапазона регулирования, к другому осуществляется при этом безударным способом путем плавного поэтапного изменения продолжительностей сигналов управления и пауз между ними.
В соответствии с описанным алгоритмом на временной диаграмме фиг.2, иллюстрирующей режим проведения приемов способа управления, абсолютная протяженность сигналов управления, формируемых внутри подинтервалов, показанных верхними дугами, постоянна, а длительность сигналов, синтезируемых внутри подинтервалов, обозначенных нижними дугами, изменяется в процессе регулирования частоты. При анализируемом варианте регулирования на первом поддиапазоне увеличение частоты от начального значения, равного FO, производится за счет последовательного уменьшения продолжительности сигналов управления, формируемых внутри обозначенных на фиг.2а верхними дугами тактовых подинтервалов, осуществляемой с учетом того, что i 3, по зависимости
1 - °-8 ( 1 13 л я -Т2(Г ТБТъ ).
Продолжительность остальных основных сигналов управления при этом остаетсяпостояннойиравной
1
Я on г Отмеченный процесс продолжается до момента достижения выходной частотой преобразователя значения Рз
1К
-гт Fo, при котором Я уменьшается до нуля (фиг.2б).
На следующем подинтервале регулирования увеличение частоты осуществляется путем последовательного уменьшения продолжительности показанных на фиг,26,в
5 стрелками левых от середин половин интервалов включающих сигналов (пауз между основными сигналами управления), продолжительности самих основных сигналов с учетом того, что i 2, изменяется
10 при этом по зависимости:
0811
Я -тпг- ( -р- л р ) вплоть до частоты Fa
Изменение выходной частоты от F2 до F2l Q-Fo производится, как показано на фиг.2 г, изменением продолжительности сигнала Я -fa (-р и р )при постоянстве
i /
1
длительности
сигналов
T20rV .,
Начиная с частоты Fa (фиг.2д) и до частоты F у FO 4 FO (фиг.2е) внутри каждого
тактового интервала формируется по два основных (не считая центрального дополнительного) сигнала управления с продолжи0, 0,8 t 1 1 ч п
тельностями Я -гт- ( -р- л р ) После
достижения указанной частоты -5- F0 4F0,
которая соответствует величине 0,8 Fmax и
5 характеризует собой точку перехода от несимметричного к симметричному режиму управления (в выходной полуволне Одв при этом вместо четырех начинают формироваться по три выходных импульса), дальней0 шее регулирование осуществляется путем изменения (уменьшения) продолжительности центральных на тактовых интервалах сигналов по зависимости
Л- 1-J.6 1 0.2
5 л
Устройство управления (фиг.З), реализующее предлагаемый способ формирования управляющих сигналов применительно к варианту , функционирует следующим об0 разом.
Выходной сигнал Ui блока 1 задания частоты поступает на вход генератора 2 тактовых импульсов, формирующего последовательность импульсов, частота следования
5 которых на всем диапазоне регулирования в 12 раз превышает выходную частоту инвертора. Указанные сигналы поступают на вход генератора 3 линейно изменяющегося напряжения, синхронизируя его работу,
благодаря чему на выходе генератора 3 формируется, как показано на фиг,4, симметричное в обе стороны напряжение Us шестикратной по сравнению с выходным сигналом преобразователя частоты, ампли- туда которого уменьшается пропорционально росту выходной частоты, и постоянно фиксируется датчиком 4 амплитуды. С выхода датчика А сигнал, пропорциональный амплитуде напряжения Us, поступает через усилители 5 и 6 на входы компараторов 7 и 8, в которых сопоставляется соответственно с выходными напряжениями генератора 3 и Ug интегратора 9, накопительный элемент 10 которого шунтирован ключом 11, управ- ляемым выходным сигналом компаратора 7.
Коэффициенты передачи усилителей 5 и 6 соответственно равны 0,8 и 0,4. На выходе интегратора 9 включён пороговый узел 12, фиксирующий минимальное (нулевое) зна- чение напряжения Ug, который через элемент ИЛИ 13 связан с входом счетного триггера 14, подключенного своим выходом к коммутатору 15 полярности зарядного напряжения интегратора 9. На период време- ни, когда величина сигнала Us превышает уровень напряжения на выходе усилителя 5, компаратором 7 выдается команда на замыкание ключа 11, шунтирующего при этом накопительный элемент 10 интегратора 9. Благодаря приведенной схеме соединения узлов 5-15 на выходе интегратора 9, как показано на фиг.4, формируется симметричное пилообразное напряжение Ug с паузами нулевого уровня на центральных участках тактовых интервалов.
Указанный сигнал Ug, являясь основным развертывающим напряжением в системе, поступает на входы компарирующих узлов 16-18, на выходах которых включены цепи формирования коротких однополяр- ных импульсов, состоящие, как показано применительно к узлу 18, из логического инвертора 19 и дифференцирующих цепочек 19 и 20. На другие входы компарирую- щих узлов 16-18 поступают сигналы с выходов сумматоров 22 и 23 и усилителя 24 с коэффициентом передачи 0,5, на входы которого приходят сигналы с источника 25 опорного напряжения и интегратора 26, В момент равенства упомянутых сигналов на входах узлов 16-18 системой синтезируются команды (короткие импульсы) на формирование фронтов выходных импульсов, которые через элемент ИЛИ 27 поступают на вход счетного триггера 28, связанного своим выходом с информационным входом логического распределителя управляющих импульсов на вентили преобразователя 29.
Выход триггера 28 связан также с конденсатором 30, выделяющим постоянную составляющую последовательности -импульсных сигналов с выхода триггера 28. Напряжение конденсатора 30 поступает далее на делитель 31, в котором осуществляется его деление на аналоговый сигнал задания частоты Ui, в результате чего на выходе делителя 31 в соответствующем масштабе формируется напряжение, пропорциональное суммарной на полупериоде длительности выходных импульсов. Этот сигнал поступает далее на минусовый вход интегратора 26, связанного вторым плюсовым входом с источником опорного напряжения 25, амплитуда которого U25
0,8 измакс,,
, где Usmax- максимальная амплитуда сигнала генератора 3, наблюдаемая на начальной выходной частоте преобразователя. Благодаря приведенному включению амплитуда сигнала на выходе интегратора 26 пропорциональна величине
(г-Я v1 )- длительности основных выходных импульсов кривой выходного напряжения, а сигнал на выходе суммирующего усилителя 24 пропорционален половинной продолжительности основных сигналов управления.
В процессе связанного регулирования частоты и величины напряжения преобразователя контур внутренней обратной связи системы, включающий узлы и блоки 26, 28, 30 и 31, обеспечивает на диапазоне регулирования от начальной частоты F0 до F21
-|-2F0 непрерывное, осуществляемое
по астатическому принципу, формирование корректирующего сигнала, поступающего на входы сумматоров1 22 и 23 и непосредственно на компаратор 18 и автоматически поддерживающего постоянство суммарной вольт-секундной площади выходных импульсов на полупериоде в процессе измене- ния выходной частоты. При этом на указанном диапазоне автоматически выполняется реализация представленных в первой части описания функциональных зависимостей между продолжительностями сигналов управления, их временным положением и текущими значениями выходной частоты преобразователя, а также автоматический переход от одного поддиапазона регулирования к другому, наблюдаемый на указанных граничных частотах Fr и FJ .
Начиная с частоты Fa -|- величина
сигнала U23 превышает амплитуду пилообразного напряжения Ug, на полупериоде
кривой линейного выходного напряжения синтезируются при этом по четыре импульса одинаковой длительности, величина сигнала 1)24 на выходе усилителя 24 при дальнейшем увеличении частоты последовательно снижается, достигая нулевого значения на последней граничной частоте FI
2° 3F0 0,8 Fmax. Полуволна выходного
сигнала преобразователя после этого момента и до максимальной частоты Fmax Fo n
1,6
-формируется из трех импульсов на
полупериоде. Указанный момент фиксируется логическим узлом, состоящим из компаратора 32, на один вход которого приходит сигнал с выхода датчика 4 амплитуды, а на второй поступает постоянное напряжение с первого выхода источника 33,
определяемое как Кзз(1) Зтах
n
По
сигналу компаратора 32 происходит замыкание ключа 34 и переключение ключа 35, после чего в компарирующем узле 26 начинается сопоставление текущего значения сигнала из с напряжением, снимаемым с второго выхода источника 33 и определяемым как изз(и) --, а к входу четырехразрядного регистра 37 подключается выход генератора 2 тактовых импульсов.
Благодаря приведенному подключению четырехразрядного регистра 37 на частотном диапазоне Fo - FI 0,8 Fmax обеспечивается требуемая асимметрия алгоритма формирования управляющих сигналов. Выраженные в цифровой форме состояния старших выходных разрядов Q/i, Qs, Q2 регистра 37 на периоде выходной частоты, как показано на фиг.4, записываются соответственно как 100, 001, 000, 101, 110, 111, эти сигналы поступают на тактовые входы логического распределителя 29 и определяют собой известный алгоритм синтеза управляющих сигналов на основные вентили трехфазного инвертора.
Таким образом, предлагаемый способ управления позволяет на большей части диапазона регулирования преобразователя, в зоне Fo - 0,8 Fmax обеспечить полное отсутствие в спектре выходного напряжения наиболее нежелательной пятой гармонической составляющей, причем обеспечивается это наиболее простым путем, без дополнительных коммутаций вентилей силовой схемы, вызывающих дополнительные потери электрической энергии. Форма выходного напряжения в процессе регулирования при этом плавно изменяется, что позволяет устранить бро
10
15
20
25
30
35
40
45
ски тока в силовых цепях инвертора и нагрузки, повышая тем самым качества процесса регулирования и надежность функционирования преобразовательных систем в целом.
Формула изобретения Способ управления трехфазным регулируемым мостовым преобразователем, заключающийся в том, что основные вентили разных фаз преобразователя периодически включают и выключают с взаимным фазовым сдвигом в 60 зл.град., при этом для каждого вентиля в течение одного полупериода от 0 до 180 эл.град. формируют зону проводимости, в течение другого полупериода от 180 до 360 эл.град. формируют зону закрытого состояния, внутри тактового интервала каждой зоны проводимости от 60 до 120 эл.град. и тактового интервала каждой зоны закрытого состояния вентилей от 240 до 300 эл.град. формируют разноименные с соответствующей зоной управления сигналы управления, количество которых последовательно уменьшают с ростом выходной частоты преобразователя F, причем, на начальной выходной частоте FO внутри тактовых интервалов формируют четное n количество подинтервалов равной между собой длительности, в конце каждого из которых формируют указанные сигналы управления, отличающийся тем, что, с целью улучшения гармонического состава выходного напряжения преобразователя в процессе связанного регулирования частоты и величины напряжения, осуществляемого в диапазоне выходных частот Fo FQ n
-r-g- путем плавного безударного перехода от одного поддиапазона регулирования к другому, в диапазоне частот Fo - j Fo в
центрах тактовых интервалов формируют разноименные с соответствующей зоной управления дополнительные сигналы управления с продолжительностью, равной
-отпг длительность тактовых подинтерва jU Г
0,8
лов определяют как
50
55
на каждой по6 F0n
ловине тактового интервала начало каждого первого и конец каждого последнего тактового подинтервала синхронизируют соответственно с началом тактового интервала, с границами указанного дополнительного сигнала управления и с концом тактового
интервала, в диапазоне частот F0 -5- FO на
каждой половине тактового интервала формирования каждого i-ro, считая от правых
моментов синхронизации, сигнала управления (каждого (Н)-го сигнала управления, считая от левых моментов синхрозации) осуществляют при изменении выходной частоты преобразователя от F0 от R х
FQ П ( I - 1 )
х 2 (2 1-3 И I- 1 ) + 1 пРичем ПРИ изме нении выходной частоты от F0 до FI - F0n(l-1)
- 2 ( 2 i - ПТТ- 1 ) - 1 ВНУТРИ кажДого тактового подинтервала формируют сигнал управления с длительностью
Г 12(°f-1)(4-l|n-) FI внутри, в крайней правой части (М)-п правых и (i-2)-n левых от середин отмеченных половин тактового интервала тактовых под- интервалов формируют сигналы управле,, 0.8(2I-3) А 6F0n(i-1 ) в
ния с длительностью
крайней правой части отрезков, расположенных между указанными подин- тервалами, формируют сигналы управления с продолжительностью
+1
jii ao/iwnvi/i v ii|/Wf-iwJi iv ri i с и о т
r - 0,8 r 1 2(2i-3Ki-1) 4 -T2 L FF0n(i-l)
диапазоне частот
Fo n FO n
в крайних
0
5
0
32
правых частях отмеченных половин каждого тактового интервала формируют по одному сигналу управления с продолжи- 0,8 , 1 1
тельностью Я
Fo n f. FO n
hon
) и при
«-1 - л Qв центрах тактовых
интервалов формируют по одному сигналу управления с длительностью
1- 1 - 1.6 6Fo n 




Изобретение относится к электротехнике. Целью изобретения является улучшение спектрального состава выходного напряжения преобразователя в процессе связанного плавного регулирования частоты и величины выходного напряжения. Способ управления заключается в периодическом включении и выключении с взаимным фазовым сдвигом в 60 эл.град. основных вентиИзобретение относится к электротехнике и может быть использовано для управления регулируемыми преобразователями для электропривода на базе тиристорных инверторов напряжения. Известны алгоритмы управления полупроводниковыми преобразователями, обеспечивающие улучшение формы кривой выходного напряжения за счет многократных дополнительных коммутаций вентилей. Однако регулирование или стабилизация величины выходного напряжения в достаточно широких пределах требует наличия на входе инвертора управляемого лей инвертора, при этом интервалы проводимости и закрытого состояния вентилей составляют по 100 эл.град. В серединах интервалов проводимое™, на тактовых интервалах 60-градусных продолжительностей, асимметрично середине полупериода формируют управляющие сигналы выключения вентилей, количество которых на начальной выходной частоте F0 равно п. Для достижения цели в диапазоне выходных частот F0-Fon/2 регулирование частоты выходного на- i пряжения преобразователя осуществляют за счет непрерывной поэтапной вариации длительностей пауз между импульсами управления расположенных внутри центральных участков левой и правой частей упомянутых тактовых интервалов продолжительностью 24 эл.град. каждая, а также длительность ближних слева к центрам упомянутых 24-градусных частей сигналов управления. В середине каждого тактового интервала при этом формируют разноименные с соответствующей зоной управления дополнительные сигналы управления с продолжительностью в 12 эл.град. 4 ил. выпрямителя, что снижает суммарный КПД процесса преобразования электроэнергии и усиливает негативное влияние преобразователей на питающую сеть. Известен также алгоритм управления ключами тиристорных схем ШИР-1, при котором на начальной частоте Fo середины зон проводимости и закрытого состояния каждого из шести вентилей инвертора (тактовые интервалы проводимости и закрытого состояния) разбивают на п участков (подин- тервалов), в правой крайней части каждого из которых формируют соответственно основные паузы и участки проводимости fe 4 Ю 1
}ъ у П
Фйг.Т
гс
9 ч
i
09аш
V
«г
A
4,М
J/to7 |
Фиг.З
A
| Устройство для управления трехфазным инвертором | 1981 |
|
SU1023625A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Забродин Ю.С | |||
| Критерий оценки качества выходного напряжения автономных инверторов | |||
| - Электричество, 1987, № 3, с | |||
| Железобетонный фасонный камень для кладки стен | 1920 |
|
SU45A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
