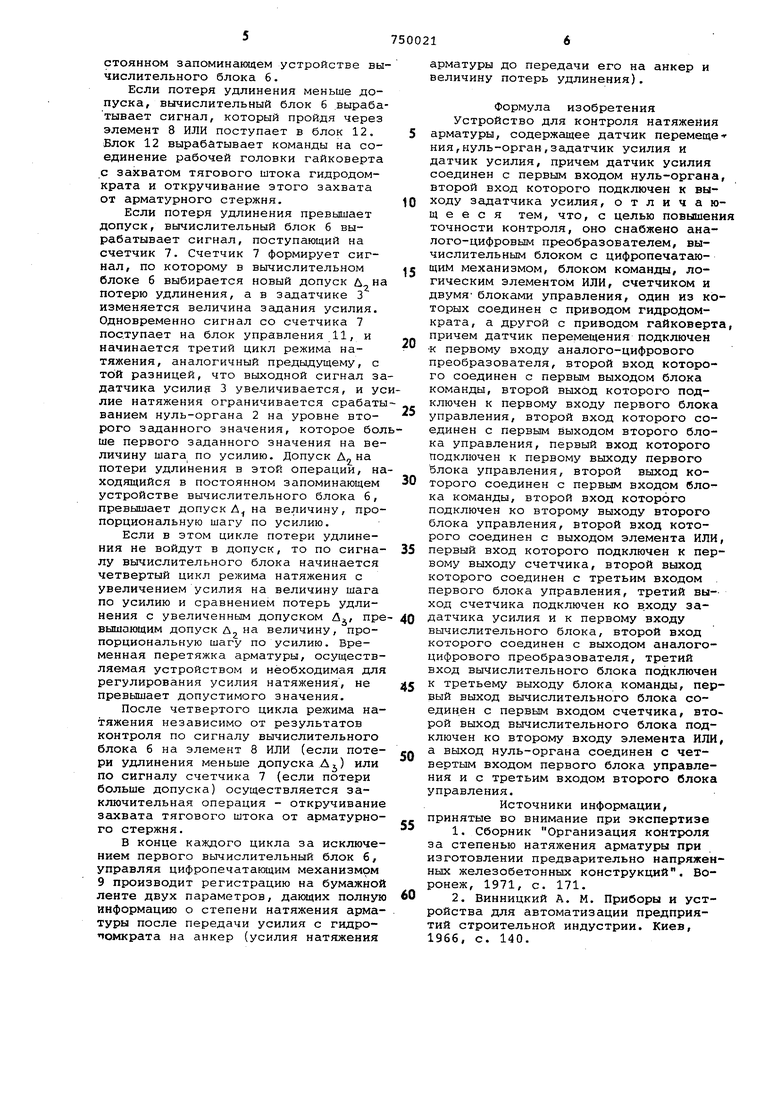
(54) УСТРОЙСТВО ДЛЯ КОНТРОЛЯ НАТЯЖЕНИЯ АРМАТУРЫ Изобретение относится к строитель ному производству, а именно - к устройствам для натяжения арматуры с од новременным активным контролем пара метров натяжения, например, при изготовлении предварительно напряженных железобетонных изделий. Известно устройство для контроля натяжения арматуры, которое контролирует общее удлинение стержневой арматуры при электротермическом натяжении. В этом устройстве сигнал с датчика удлинения поступает на вход электронного регулятора, где сравнивается с сигналом задатчика. При отклонении сигнгила датчика удлинения от сигнала задатчика регулятор включением или отключением выходных реле управляет нагревом арматуры 1 . Недостатком этого устройства, осу ществляющего контроль по общему удли нению арматуры, является то, что оно не позволяет контролировать усилие натяжения с точностью более высокой чем разброс модуля упругости,.котоЕ 1й для отдельных стержневых арматурных элементов может достигать величины порядка 10-15%. Известно и другое устройство для контроля натяжения арматуры, содержащее датчик переме;цения, нуль-орган, задатчик усилия и датчик усилия, причем датчик усилия соединен с первым входом нуль-органа, второй вход которого подключен к выходу задатчика усилия 2 . Недостатком этого устройства является низкая точность в случае значительной величины отношения случайных потерь удлинения при передаче усилия натяжения с домкрата на анкер к упругому удлинению арматуры. Датчик положения штока домкрата используется в этом устройстве только для защиты от недопустимо большой вытяжки и включен в схему, контролирующую допустимое соотношение между усилием натяжения и величиной вытяжки арматуры в процессе натяжения. Поэтому это устройство не позволяет получить информацию о фактически достигнутой силе натяжения арматуры, которая остается после передачи усилия с домкрата на анкерную гайку при снижении давления в рабочей полости домкрата. Цель изобретения - повышение точности контроля. Эта цель достигается тем, что уст ройство для контроля натяжения арматуры, содержащее датчик перемещения, нуль-орган, задатчик усилия и датчик усилия, причем датчик усилия соедине с первым входом нуль-органа, второй вход которого подключен к выходу задатчика усилия, снабжено аналого-циф ровым преобразователем, вычислительным блоком с цифропечатающим механиз tvK3M, блоком команды, логическим элеteHTOM ИЛИ, счетчиком и двумя блоками управления, один из KOTOpiiix соединен с приводом гидродомкрата, а другой с приводом гайковерта, причем датчик перемещения подключен к первому входу аналого-цифрового преобразователя второй вход которого соединен с первым вЕлходом блока команды, второй выход которого подключен к первому входу первого блока управления, второй вход которого соединен с первым выходом второго блока управления, первый вход которого подключен к первому выходу первого блока управления, второй выход которого соединен с первым входом блока команды, второй вход которого подключен ко второму выходу второго блока управления, второй вход которого соединен с выходом элемента ИЛИ, первый вход которого подключен к первому выходу счетчика, вто рой выход которого соединен с третьим входом первого блока управления, третий выход счетчика подключен ко входу задатчика усилия и к первог-лу входу вычислительного блока, второй вход ко торого соединен с выходом аналогоцифрового преобразователя, третий вход вычислительного блока подключен к третьему выходу блока команды, первый выход вычислительного блока соеди нен с первым входом счетчика, второй выход вычислительного блока подключен ко второму входу элемента ИЛИ, а выход нуль-органа соединен с четвертым входом первого блока управлени и с третьим входом второго блока управления. На фиг. 1 представлена блок-схема устройства, на фиг, 2 - диаграммьл, пояснякяцие работу устройства. Устройство для контроля натяжения арматуры содержит датчик 1 усилия, нуль-орган 2, задатчик 3 усилия, датчик 4 перемещения, аналого-цифроззой преобразователь 5, вычислительный бло б, счетчик 7, элемент 8 ИЛИ, цифропечатающий механизм 9, блок .1.0 команды, первый блок 11 управления,, второй блок 12 управления. Работа устройства осуществляется следующим образом. По команде из блока 12 управления происходит закручивание захвата 7:ягового штока гидродомкрата на резьбу тягового конца арматуры. Йри закручивании захвата на число шагов резьбы, необходимое для безаварийной работы устройства, срабатывает .первый концевой выключатель (контакты концевых выключателей включены в электрические цепи блоков управления,выполненных на логических элементах) и тем самым разрешает начало первого цикла режима натяжения - первичного натяжения и отпуска для устранения зазорс в и неплотностей в аккеровке арматуры и реализации разного рода невозвратимых деформаций, в этом цикле контроль с помощью датчика перемещения не проводится. По команде блока 11 управления начинается натяжение арматуры. В соответствии с выходным сигналом задатчика 3 усилия усилие натяжения повышается до первого заданного значения и ограничивается на этом, уровне в результате срабатывания нуль-органа 2, сравнивающего выходные сигналы датчика 1 усилия и задатчика 3. После выдержки усилия в течение времени, формируемого блоком И, по команде из этого блока осуществляется снижение усилия до нуля. Затем блок 12 вырабатывает сигналы, по которым рабочая головка гайковерта снимается с захвата тягового штока гидродомкрата и одевается на фиксирующую удлинение арматуры анкерную гайку. При нормальной работе устройства после соединения рабочей головки гайковерта с анкерной гайкой арматуры поступает сигнал от второго концевого выключателя, разрешая переход ко второму циклу - натяжению арматуры с контролем усилия и потерь удлинения. ,Цля этого по команде из блока 11 управления усилие натях ения вновь повышается до первого заданного значения и ограничивается на этом уровне срабатыванием нуль-органа 2. Затем по команде из блока 12 гайковерт закручивает анкерную гайку, фиксиру ощую удлинение арматуры. После этого по сигналу из блока 12 блок 10 команды вводит в вычислительный блок б первое начальное значение удлинения tj.,j, выработанное аналого-цифровым преобразователем 5 в соответствии с сигналом датчика 4 перемещенияДалее по команде блока 11 усилие сни жается до минимального значения, сохраняющего закрытыми люфты натяжного устройства, вызывающие дополнительную погрешность измерения удлинения. Затем блок 10 команды по сигналу из блока 11 вводит в вычислительный блок б первое конечное значение удлинения tf,, измеренное датчиком перемещения. По сигналам управления из блока 10 команды вычислительный блок б вычиспяет потерю удлинения, равную разности начального и конечного значениГг удлинения, и сравнивает ее с величиной допуска Д , находящейся в постоянном запоминающем устройстве вы числительного блока 6. Если потеря удлинения меньше допуска, вычислительный блок 6 выраба тывает сигнал, который пройдя через элемент 8 ИЛИ поступает в блок 12, Блок 12 вырабатывает команды на соединение рабочей головки гайковерта с захватом тягового штока гидродомкрата и откручивание этого захвата от арматурного стержня. Если потеря удлинения превышает допуск, вычислительный блок б вырабатывает сигнал, поступающий на счетчик 7. Счетчик 7 формирует сигнал, по которому в вычислительном блоке б выбирается новый допуск л на потерю удлинения, а в задатчике 3 изменяется величина задания усилия. Одновременно сигнал со счетчика 7 поступает на блок управления 11, и начинается третий цикл режима натяжения, аналогичный предыдущему, с той разницей, что выходной сигнал за датчика усилиз 3 увеличивается, и ус лие натяжения ограничивается срабаты ванием нуль-органа 2 на уровне второго заданного значения, которое бол ше первого заданного значения на величину шага по усилию. Допуск Д„ на потери удлинения в этой операции, на ходящийся в постоянном запоминающем устройстве вычислительного блока 6, превышает допускД на величину, пропорциональную шагу по усилию. Если в этом цикле потери удлинения не войдут в допуск, то по сигналу вычислительного блока начинается четвертый цикл режима натяжения с увеличением усилия на величину шага по усилию и сравнением потерь удлинения с увеличенным допуском Д, пре вышакндим допуск д на величину, пропорциональную шагу по усилию. Временная перетяжка арматуры, осуществляемая устройством и необходимая для регулирования усилия натяжения, не превышает допустимого значения. После четвертого цикла режима натяжения независимо от результатов контроля по сигналу вычислительного блока б на элемент 8 ИЛИ (если потери удлинения меньше допуска Д) или по сигналу счетчика 7 (если потери больше допуска) осуществляется заключительная операция - откручивание захвата тягового штока от арматурно го стержня. В конце каждого цикла за исключе нием первого вычислительный блок б, управляя цифропечатающим механизмрм 9 производит регистрацию на бумажно ленте двух параметров, дакщих полную информацию о степени натяжения арма туры после передачи усилия с гидро юмкрата на анкер (усилия натяжения арматуры до передачи его на анкер и величину потерь удлинения). Формула изобретения Устройство для контроля натяжейия арматуры, содержащее датчик перемещения,нуль-орган,задатчик усилия и датчик усилия, причем датчик усилия соединен с первым входом нуль-органа, второй вход которого подключен к выходу задатчика усилия, отличающееся тем, что, с целью повышения точности контроля, оно снабжено аналого-цифровым преобразователем, вычислительным блоком с цифропечатающим механизмом, блоком команды, логическим элементом ИЛИ, счетчиком и двумя блоками управления, один из которых соединен с приводом гидроДомкрата, а другой с приводом гайковерта, причем датчик перемещения подключен к первому входу аналого-цифрового преобразователя, второй вход которого соединен с первым выходом блока команды, второй выход которого подключен к первому входу первого блока управления, второй вход которого соединен с первым выходом второго блока управления, первый вход которого подключен к первому выходу первого Ьлока управления, второй выход которого соединен с первым входом блока команды, второй вход которого подключен ко второму выходу второго блока управления, второй вход которого соединен с выходом элемента ИЛИ, первый вход которого подключен к первому выходу счетчика, второй выход которого соединен с третьим входом первого блока управления, третий вы-ход счетчика подключен ко входу задатчика усилия и к первому входу вычислительного блока, второй вход которого соединен с выходом аналогоцифрового преобразователя, третий вход вычислительного блока подключен к третьему выходу блока команды, первый выход вычислительного блока соединен с первым входом счетчика, второй выход вычислительного блока подключен ко второму входу элемента ИЛИ, а выход нуль-органа соединен с четвертым входом первого блока управления и с третьим входом второго блока управления. Источники информации, принятые во внимание при экспертизе 1.Сборник Организация контроля за степенью натяжения арматуры при изготовлении предварительно напряженных железобетонных конструкций. Воронеж, 1971, с. 171. 2.Винницкий А. М. Приборы и устройства для автоматизации предприятий строительной индустрии. Киев, 1966, с. 140.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для натяжения арматуры | 1978 |
|
SU754029A1 |
| Устройство для автоматического конт-РОля пРОКАТКи МЕТАллА B пОлЕ дОпуС-KOB пО ТОлщиНЕ | 1979 |
|
SU850242A1 |
| Способ контроля натяжения арматуры на бетон | 1978 |
|
SU727814A1 |
| СТЕНД КОНТРОЛЯ КРУТЯЩЕГО МОМЕНТА ПНЕВМАТИЧЕСКИХ ГАЙКОВЕРТОВ | 2014 |
|
RU2552870C1 |
| Способ правки металлическихиздЕлий РАСТяжЕНиЕМ | 1977 |
|
SU831268A1 |
| Устройство для повагонного взвешивания транспортных объектов на ходу | 1981 |
|
SU991176A1 |
| Устройство для контроля работоспособности аналого-цифровых преобразователей | 1979 |
|
SU864545A1 |
| ПНЕВМАТИЧЕСКИЙ ГАЙКОВЁРТ С ЭЛЕКТРОННЫМ КОНТРОЛЕМ МОМЕНТА | 2015 |
|
RU2598755C1 |
| Устройство для регистрации эксплуатационных показателей работы транспортного средства | 1980 |
|
SU951349A1 |
| Автоматическое весоизмерительное устройство | 1981 |
|
SU974137A1 |
Фиг.1
1|силие
удлинение
