(54) АВТОМАТ РАЗГРУЗКИ НАСОСА
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОПРИВОД | 2018 |
|
RU2724422C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2002 |
|
RU2218486C1 |
| НАСОСНАЯ СТАНЦИЯ | 2001 |
|
RU2221166C2 |
| Гидропривод | 1978 |
|
SU775416A1 |
| Гидравлическая система управления фрикционными элементами коробки передач | 1990 |
|
SU1759672A1 |
| Автомат разгрузки насоса | 1990 |
|
SU1682642A1 |
| АВТОМАТ РАЗГРУЗКИ НАСОСА | 1996 |
|
RU2126100C1 |
| АВТОМАТ РАЗГРУЗКИ НАСОСА | 1968 |
|
SU219980A1 |
| Гидравлическая система для автоматического регулирования вертикального положения рабочих органов сельскохозяйственных машин | 1973 |
|
SU462572A1 |
| РЕЗЕРВИРОВАННЫЙ СЛЕДЯЩИЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2002 |
|
RU2230944C2 |
I
Изобретение касается насосно-аккумуляторного привода, а именно привода ме.ханизмов с несколькими исполнительными органами, и может быть использовано в составе тракторных погрузчиков, автомобильных кранов и других мобильных подъемно-транспортных средств.
Известен автомат разгрузки насоса для насосно-аккумуляторного привода, содержащий корпус с каналами дляподвода и отвода рабочей жидкости, первый из которых сообщен с пневмогидравлическим аккумулятором, второй - с насосом, а третий - со сливом, причем в первом канале размещена подпружиненная втулка с толкателем, взаимодействующим с запорным элементом 1 .
Недостатком указанного автомата является невозможность обеспечения работы привода с несколькими независимыми исполнительными органами.
Целью изобретения является обеспечение независимой работы нескольких исполнительных органов.
Это достигается тем, что в корпусе дополнительно выполнены параллельные по числу исполнительных органов, каналы.
в каждом из которых размещены плунжер и плоский подпружиненный золотник с отверстием и канавкой, причем параллельные каналы сообщены со сливом, а запорный элемент первого канала выполнен в виде плоского золотника с отверстием.
Кроме того, в параллельных каналах и канале, сообщенном с насосом, установлены плавающие подпружиненные втулки, взаимодействующие с плоскими золотниками.
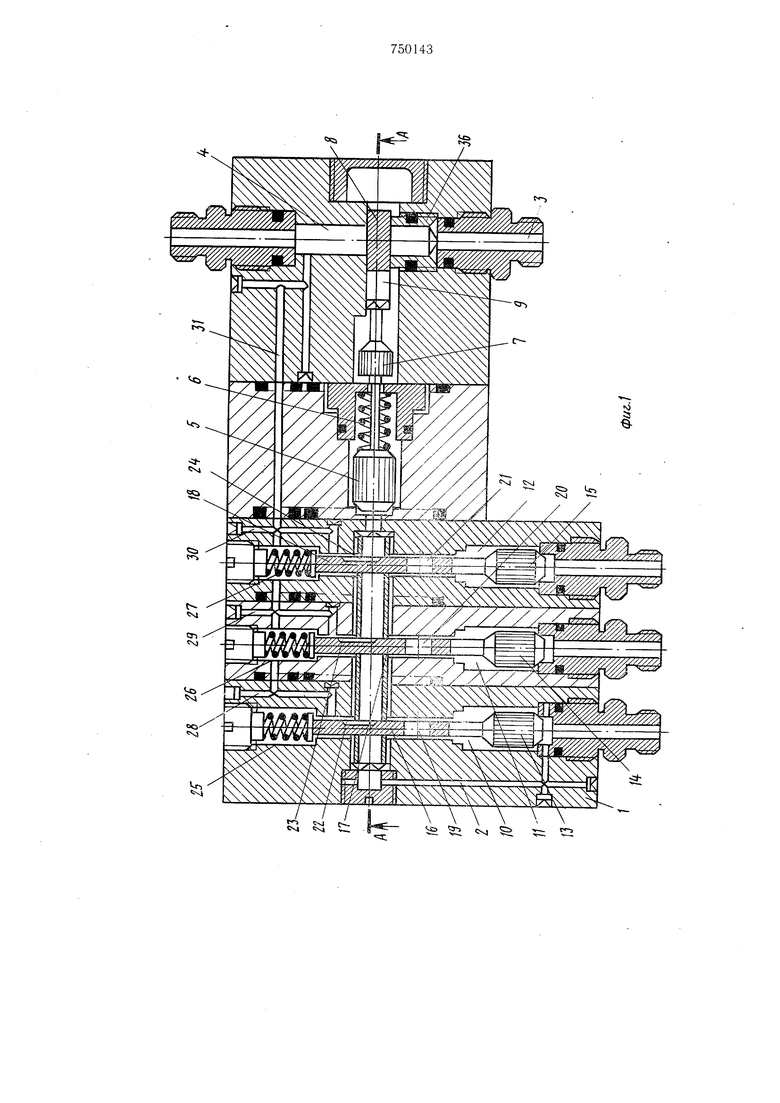
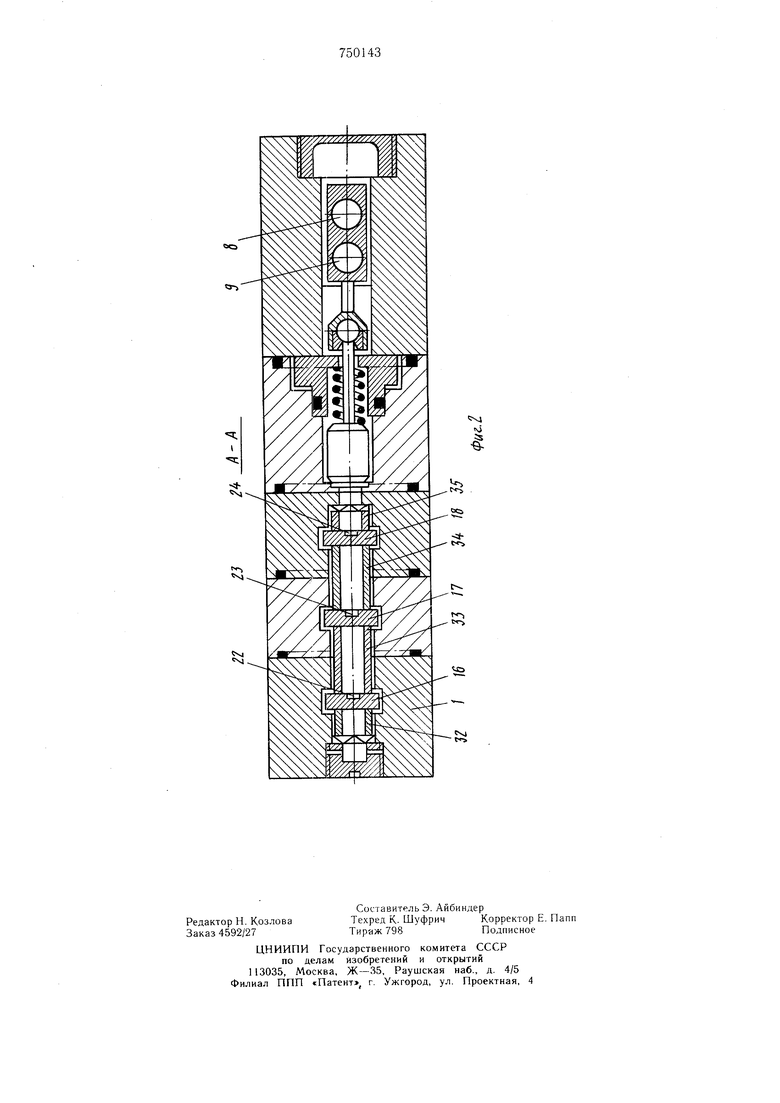
На фиг. 1 представлен продольный разрез автомата; на фиг. 2 - сечение А-А на фиг. 1.
Автомат разгрузки насоса содержит корпус 1, в котором выполнен угловой канал 2 для сообщения с пневмогидравлическими аккумуляторами (не показаны), канал 3 для сообщения с насосом (не показан), канал 4 для сообщения со сливом (не показан). В канале 2 размещена втулка 5 с пружиной 6 и толкателем 7, взаимодействующим с запорным элементом, выполненным в виде 20 плоского золотника 8 с отверстием 9. Кроме того, в корпусе 1 выполнены па-раллельные каналы 10, 11, 12, которые сообщены с пневмогидравлическими аккумуляторами по числу исполнительных органов (не показаны). В каналах 10, 11, 12 размещены плунжеры 13, 14, 15 и плоские золотники 16, 17, 18 с отверстиями 19, 20, 21 и канавками 22, 23, 24 соответственно. Золотники 16, 17, 18 подпружинены пружинами 25, 26, 27 соответственно. Каналы 10, И, 12 сообщены со сливом каналами 28, 29, 30, 31. В канале 2 расположены плавающие подпружиненные втулки 32, 33, 34, 35, взаимодействующие с золотниками 16, 17, 18. В канале 3 расположена плавающая подпружиненная втулка 36, взаимодействующая с золотником 8.
Автомат разгрузки насоса работает следующим образом.
При зарядке пневмогидравлических аккумуляторов давление рабочей жидкости, воздействует на плунжеры 13, 14. 15 и, при достижении в аккумуляторах давления, соответствующего настройке пружин 25, 26, 27, золотники 16, 17, 18 перемещаются в каналах 10, 11, 12, сообщая отверстия 19, 20, 21 с полостями плавающих подпружиненных втулок 32, 33. 34, 35. При этом рабочая жидкость по каналу 2 поступит в полость втулок 32, 33, 34, 35 и будет воздействовать на торец втулки 5 только в том случае, если все три золотника 16, 17, 18 переместятся в верхнее положение, т. е. будет закончена зарядка всех пневмогидравлических аккумуляторов.
При воздействии давления рабочей жидкости на втулку 5, последняя, преодолев усилие «слабой пружины 6 воздействует на толкатель 7, который перемещает золотник 8 вправо. При совмещении отверстия 9 золотника 8 с полостью плавающей подпружиненной втулки 36, каналы 3 и 4 сообщатся между собой и рабочая жидкость от насоса будет поступать на слив. При этом насос будет работать в режиме холостого хода, а исполнительные органы будут получать питание от пневмогидравлических аккумуляторов.
При разрядке хотя бы одного из пневмогидравлических аккумуляторов, произойдет падение давления в одном из параллельных каналов. Вследствие этого, под действием пружины соответствующий золотник опустится и его отверстие перекроется. Произойдет разобщение полостей плав ающих подпружиненных втулок и прекратится воздействие рабочей жидкости на втулку 5 и, следовательно, на золотник 8. Последний под действием пружины 6 переместится влево и разобщит каналы 3 и 4. При перемещении вниз золотников 16, 17, 18 канавки 22, 23, 24 совместятся с полостями плавающих подпружиненных втулок 32, 33, 34, 35 и каналами 28, 29, 30. Это даст возможность жидкости, оставщейся под торцом втулки 5
и в полостях втулок 32, 33, 34, 35, выйти на слив через каналы 28, 29, 30 и 31, что будет способствовать более плотному закрытию втулки 5 и перекрытию канала 4. При перекрытии каналов 3 и 4 золотником 8 насос отсоединится от слива и
рабочая жидкость начнет поступать в тот пневмогидравлический аккумулятор, в котором прсьизощло падение давления. Будет происходить зарядка аккумулятора.
Далее работа автомата будет происходить аналогично описанному.
Таким образом, автомат разгрузк.ч на coca обеспечивает параллельную и независимую работу исполнительных органов насосно-аккумуляторного привода.
Формула изобретения
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР jYo 219980, кл. F 15 В 1/02, 1967. :i fc
«а
