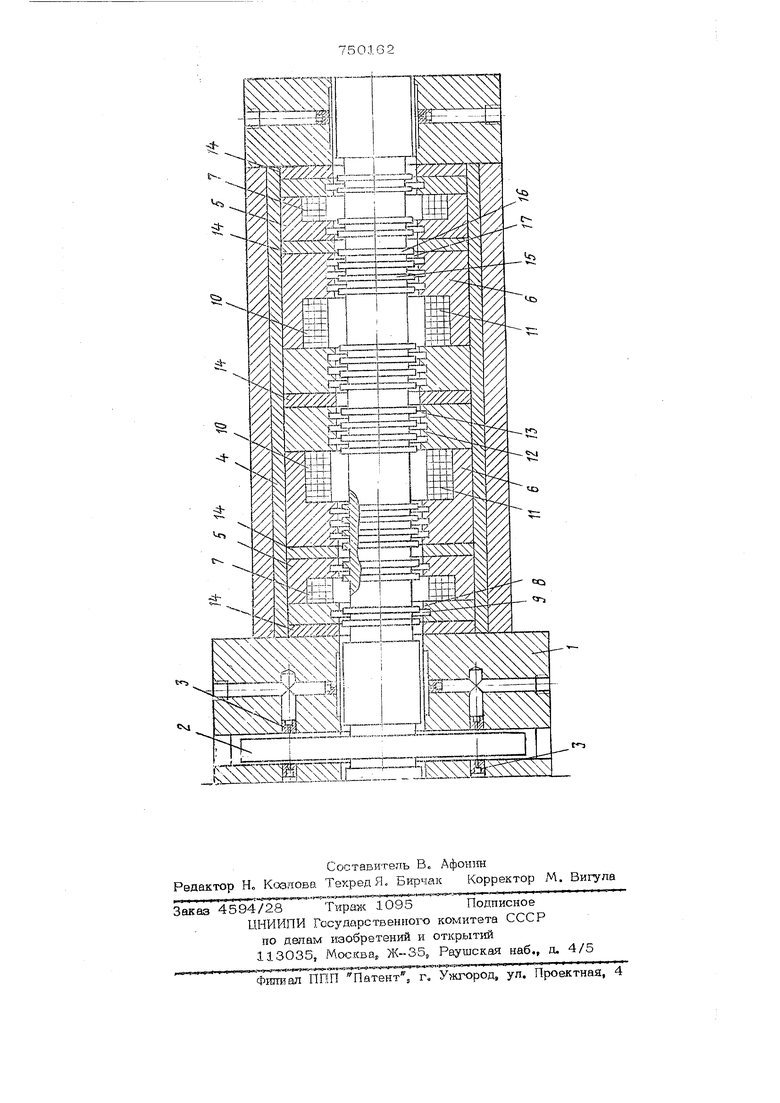
Изобретение относится к области машиностроения и может быть использовано Б станках или приборах, в которых применяются аэростатические подпятники с высокой точностью положения подвижного узла. Известен аэростатический подпятник, содержащий основание, подвижный узел, сопла подачи сжатого газа в рабочий зазор и узел стабилизации зазора li В известном аэростатическом подпятни ке стабилизация зазора осуществляется за счет регулирования давления подводимого в рабочий зазор подпятника газа. Однако иэ-за большой инерционности, а также изменения жесткости подпятника пр регулировании давления газа в зазоре он имеет узкую область эффективного при менения. Целью изобретения является расширение области эффективного применения аэроста таческого подпятника. Это достигается т&л, что в известном аэростат1гческом подпятнике, содержащем основание, подвижный узел, сопла подачи сжатого газа в рабочий зазор и узел стабилизации зазора, который представляет собой два датчика линейных перемещений и электрически связанные с шпч.1и два компенсатора перемещений, расположенные в установленном на основан1Ш подпятника корпусе попарно - симметрично его поперечной оси, так что по каждую сторону от поперечной оси находится один датчик линейных пepav eщeний и од1т компенсатор перемещений. Датчики Л1гаейных перемещений и компенсаторы перемещений представляют собой электромагниты, имеющие вид стаканов с обмоткой и двумя симметричньп 1и относительно нее полюсными наконечниками. Электроктагниты разделены изолирующими прокладками. Между полюсными наконечниками всех электромагнитов с радиальным зазором размещен хвостовик, закрепленный на подвижном узле. Полюсные наконечники электромагнитов и охватываемые ими участки хвостовика выполнены в виде черед5тощихся кольцевых выступов к впадин При этом выступы полюсных наконечи:якоБ электромагнитов, находящихся по разные стороны от поперечной оси корпуса, омещ кы вдоль хвостовика в разные стороны относит-елько выступов хвостовика Кромб того, для создания возможности регулирования рабочего зазора эпектромагнитьт компенсаторы перемещений снабжены допопнитеяьной обмоткой На чертеже показан аэростатичесжкй подпятник, продольный разрез. Аэростат1гаеский подпятник содержит основание 1, подвижный узел 2, сопла 3 по.дачн сжатого газа в рабочий зазор. На основании установлен корпус 4, в котором попарно- ;имметрично относительно его поперечной оси установлены два электромагнита 5, выполняющие роль датчиков пшюйнык перемещений} и два электромагнита 6, выполняющие роль компенсаторов перемещений. Все электромагниты выполнены в форме стаканов. Электромагниты датчики линейных перемещений: снаб- жены электрической обмоткой 7, уложенной на внутренней поверхности стаканов полюсные наконечники электромагнитов расположены по обе стороны от обмотки и выполнены в виде чередующихся кольцевых выступов 8 и впадин 9 пр.ямоуголь- ной формы. Эпектромагниты компенсаторы перемещений имеют две обмотки: компенсационную 10 и задаЮ1.цую 11, уложенные на внутренней поверхности стаканов; по- лгосные наконечники электромагнитов расположены по обе стороны от обмотки и выполнены в виде чередующихся кольдевых вы.ступов 12 и впадин 13 nprnvio-.nronb ной формы. Между всеми электромагнитами установлены прокладки 14 из материала с большШЛ магнитным сопротиЕ.лени ем. На подвижном узле закреплен хвсютовик 15, размещенный относительно полюс ных наконечников всех электро тагнитов с радиальным зазором. Участки хвостовика,- охватываемые полюсными наконечниками всех элeктpo aгнитoв, выполнены в виде чередующихся выступов 16 и впадин 17 прямоугольной формы, Выступы полюсных наконечников электромагнитов, находящиеся по разные стороньз от поперечной оси корпуса, смещешы в направлении к поперечной оси на одинаковую . Благодаря такому смещению при замыкании магнитного потока через воздущный зааэр между полюсными наконечниками и хвостовиком появляются осевые составляющие электромагнитной СИЛЫ, стремящиеся поддерживать нейчрат -ное положение подвижного узла. Обмотки электромагнитов связаны между собой, образуя электрическую мостовую схему, причем обмотки датчиков га5нейных перемещений включены в два плеча схемы, что свеспеч1шает высокую чувствительность измерительной системы, а обмотки компенсаторов включены в диагональ моста. Задающие обмотки электромагнитов-компенсаторов перемещений не связаны с друг1-1ми обмотками и между собой и включены навстречу друг другу. Аэростатический подпятник работает следующим образом. Сжатый газ через сопла 3 поступает в рабочий зазор и обеспечив.ает всплытие подвижного узла 2. Затем с помощью задающих обмоток 11 путем изменения тока в них осуществляет ся предварительная регулировка рабочего зазора. Суммарная нагрузка на аэростатичес:кий подпятник складывается из веса подвижного узла, внешнего воздействия я тягового усилия устройства регулирования и стабилизации зазора. Для получения рабочего зазора определенной величины требуется из eнить суммарную нагрузку. Поскольку направления осевых составляющих задающих обмоток противоположны, то с помощью результирующей этих составляющих и осуществляется требуемое изменение сутчшарной нагрузки, а следовательно, и величины рабочего зазора. После предварительной регулировки зазора осуществляется балансировка измерительного моста. Ток диагонали моста, поступающий в компенсационные обмотки 10, включенные так, что магнитные потоки электромагнитов-компенсаторов перемещений имеют одинаковые направления, устанавливается равным нулю. При действии на подвижный узел возмущающей силы и, следовательно, смещении подвижного узла с хвостовиком относительно исходного положения, в диагонали моста возникает ток, веЛ1иина и направление которого определяются величиной и направлением смещения подвижного узла. Магнитные потоки электромагнита-датчика перемещений и электромагнита-компенсатора перемещений, находжциеся по одну сторону от поперечной оси корпуса, будут иметь одинаковые направления, а магнитные потоки электромагнита-датчика перемещений и электромагнита-компенсатора перемещений, находящиеся по другую сторону от поперечной оси корпуса, будут иметь противоположные направления. В соот)етствии с изме57Hflwix-vi oceKf.ie сгютавляющне сипы элект ромаг итх в-компенсаторов и их результирующая, действующая на подвижный узел, В конечном итоге результирующая осевая сила всегда направлена в сторону, противоположную отклонению подвижного узл от исходного положения, что и приводит к автоматической стабилизации высоты рабочегю зазора. Такое выполнение узла стабилизации высоты смазочного зазора в аэростатичес ком подпятнике повышает точность полож ния подвижного узла, а следовательно и качество обрабатываемой поверхности, например, при использовании подпятника в металлорежущих стенках. Это, в свою оче редь, расширяет диапазон эффективного применения аэростатического подпятника. Формула изобретения 1. Аэростатический подпятник, содерж щий основание, подвижный узел, сопла подачи сжатого газа в рабочий зазор и узел стабилизации зазора, отличающийся тем, что, с целью расширения области эффективного применения подпятника, узел стабилизации зазора состоит из двух датчиков линейных перемещений и электрически связанных с ним 526 двух кo пeнcaтopoв перемещений, расположенных в ycтaнoБЛeннo на основании корпусе попарно-си {метрично относительно его поперечной оси и выполненных в виде разделенных изолирующтп и прокладками и представляющих из себя каждый стакан с обмоткой и двумя симметричными относительно нее полюсными наконечниками электромагнитов, а также размещенного между их полюсными наконечниками с радиальным зазором хвостовика, закрепленного на подвижном узле, при этом полюсные наконечники и охватываемые ими участки хвостовика выполнены в виде чередующихся кольцевых выступов и впадин, а выступы полюсных наконечников каждой пары электромагнитов смещены относительно выступов хвостовика вдоль его оси в разные стороны на одинаковую величину. 2. Подпятник по п. 1, отличающийся тем, что, с целью создания возможности регулирования рабочего зазора, компенсатор перемещений снабжен дополнительной обмоткой. Источники информа1щи, принятые во внимание при экспертизе 1. Curtis .Spo(rкes. Modern Trends inihf Development o Wcxcnine TooCs.Tne lournae of the institution of Production engineers, 1962, T. 41, № 2, c. 72-89 (прототип).
t
| название | год | авторы | номер документа |
|---|---|---|---|
| Аэростатический подпятник | 1975 |
|
SU681252A1 |
| Аэростатический подпятник | 1975 |
|
SU681251A1 |
| Аэростатический подпятник | 1987 |
|
SU1530855A1 |
| СТАН ДЛЯ ПОПЕРЕЧНО-КЛИНОВОЙ ПРОКАТКИ | 1995 |
|
RU2115500C1 |
| ВЫСОКОСКОРОСТНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 1967 |
|
SU200650A1 |
| Пружинный привод для шагового вращательного движения | 1980 |
|
SU1000588A1 |
| Электромеханический исполнительный орган системы ориентации искусственного спутника Земли | 2016 |
|
RU2649560C2 |
| Поляризационный модулятор-компенсатор угла поворота плоскости поляризации света | 1978 |
|
SU744421A1 |
| ДЕФЕКТОСКОП-СНАРЯД ДЛЯ ВНУТРИТРУБНОГО ОБСЛЕДОВАНИЯ ТРУБОПРОВОДОВ | 1993 |
|
RU2069288C1 |
| Горелка для дуговой сварки в среде защитного газа | 1982 |
|
SU1076230A1 |