1
Изобретение относится к области автоматики и вычислительной техники, а именно к цифровым преобразователям координат и может быть исполь- 5 зовано в качестве вычислителя, входящего в состав астронавигационных систем.
Известно устройство, содержащее блок управления, сумматоры, сдвигаю- ю щие регистры l
Недостатком известного устройст- ва является низкое быстродействие.
Наиболее близким по сущности техническим решением задачи является устройство, содержащее блок управления, коммутатор, реверсивные счетчики, сумматоры 2 .
Недостатком известного устройства является недостаточное быстро- 2Q действие.
Целью изобретения является повышение быстродействия устройства.
Поставленная цель достигается тем, что 3 устройство для преобразо- 25 ваниякоординат, содержащее первый, второй и третий сумматоры, выходы которых соединены с первыми входами одноименных реверсивных счетчиков, блок управления, первый коммутатор, Q
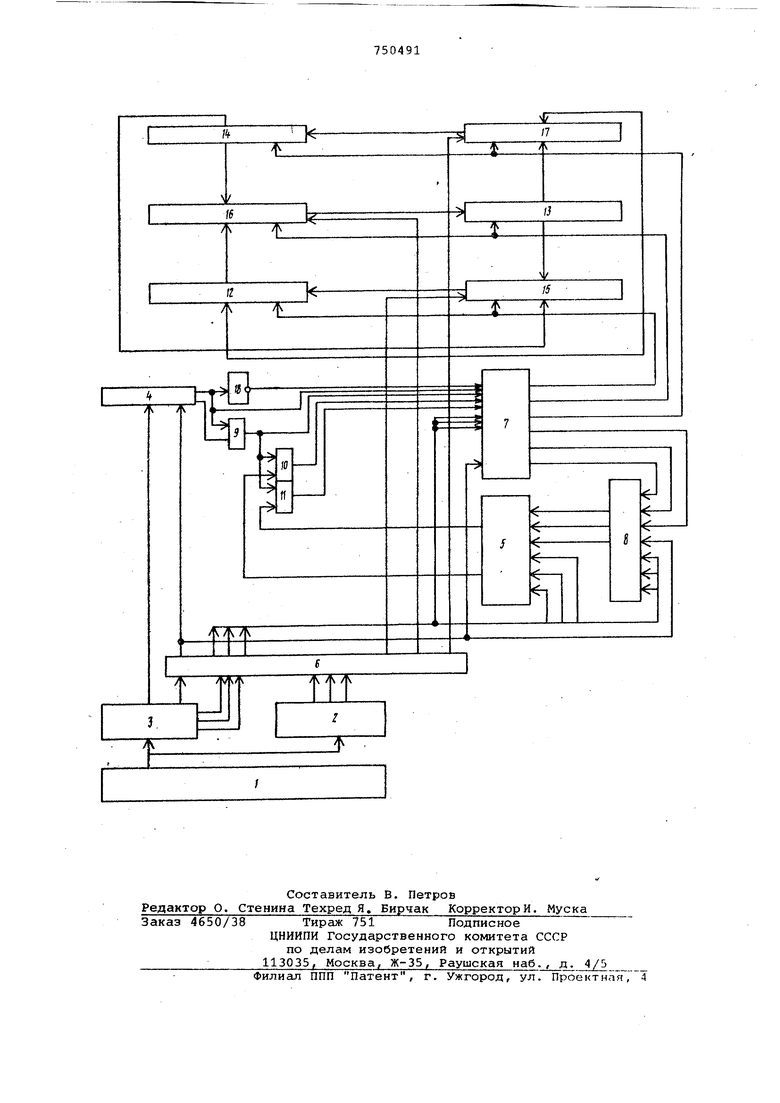
naiMHTb, введены дешифратор, формирователь, регистр аргумента, второй коммутатор, блок коммутаторов, три сумматора по модулю два, элемент НЕ, причем выход блока управления соединен со входами формирователя и дешифратора, первый выход дешифратора соединен с первым входом регистра аргумента, первый выход которого соединен со входом элемента НЕ и первым входом первого сумматора по модулю два, выход которого соединен с первыми входами второго и третьего сумматоров tio модулю два, остсшьные выходы дешифратора и выходы формирователя соединены со входами второго коммутатора, первый, второй и третий выходы которого соединены с управляющими входами первого, второго и третьего сумматоров, четвертый выход второго коммутатора соединен с управляющими входами памяти, блока коммутаторов и регистра аргумента, второй выход которого соединен со вторым входом первого сумматора по модулю два, группа выхо.дов второго коммутатора соединена с первыми группами входов памяти, первого коммутатора и блока коммутатоpoBj вторая группа входов которого соединена с выходами элемента НЕ, п вого, второго и третьего сумматоров по модулю два и первым выходам регистра аргумента, группа выходов бл ка коммутаторов соединена со второй группой входов памяти, выходы которой соединены с второй группой входов первого коммутатора, первый и второй выходы которого соединены со вторыми входами соответственно второго и .третьего сумматоров по модул два и первый выход блока коммутаторов соединенс первым входом первого сумматора и вторым входом первого реверсивного счетчика, второй выход блока коммутаторов соединен с первым входом второго сумматора и вторым входом второго реверсивного счетчика, третий выход блок коммутаторов соединен с первым входом третьего сумматора и вторым вхо дом третьего реверсивного счетчика, второй и третий входы первого сумма тора соединены с первыми выходами соответственно второго и третьего реверсивных счетчиков, второй и тре тий входы второго сумматора соедине соответственно с первым выходом пер вого реверсивного счетчика и вторым выходом-третьего реверсивного счетчика, второй и третий входы третьег cyzvjMaTopa соединены со вторыг-ш выхо дами соответственно первого и второго реверсивных счетчиков. Блок-схема устройства приведена на чертеже. Устройство содержит блок 1 управ ления, формирователь- 2, дешифратор регистр 4 аргумента, коглмутаторы 5 и б, блок 7 коммутаторов, память 8,сумматоры 9-11 по модулю два, реверсивные счетчики 12-14 сумматоры 15-17, элемент Е 18. Устройство работает следующим об разом Предварительно в реверсивные счет чики 12- 14 устанавливаются значения проекций единичного радиуса-вектора в исходной системе координат. Затем последовательно согласно программе работы, задаваемой блоком 1, формирователем 2 и дешифратором 3, осущест вляются задЕ.нные преобразования координат. Пусть, например, первый поворот системы координат необходимо осуществить вокруг оси г на заданный угол сКд, превышающий по величине два квадранта. Код квадранта в этом случае будет соответствовать следующим значениям разрядов: ,.. что видно из таблицы: Номер квадран-1 Код квадранта таI а П а Первым тактом значение аргумента передается с дешифратора 3 в регистр 4. Во втором такте определяются значения логических функций су. 014е-., ,4a,M,a,.oV,. для чего код квадранта передается из памяти В через коммутатор 5 в сумматоры 9-11 и с помощью сигнала, поступившего с коммутатора 6, согласно полученным результатам корректируются знаки начальных значений проекций на оси и Ь, . При этом изменяются знаки в реверсивных счетчиках 12, 14 и в сумматоре 17, поскольку возбуждается соответствующий выход блока 7, Таким образом, заканчиваются все подготовительные операции, в результате которых получены значения проекций во вспомогательной системе координат, повернутой относительно исходной на 180°, и начинается непосредственно выполнение преобразование координат. В последующие моменты времени синхронизирующие импульсы из коммутатора 6 посту пают на регистр 4 для преобразования величины, записанной в нем в параллельном коде, в унитарный код путем списывания ее значения до нуля, и на управляющие входы сумматоров 15, 17. Схема, состоящая из реверсивных счетчиков 12, 14 и сумматоров 15, 17 которые связаны между собой указанным образом причем знак переполнения одного из сумматоров инвертируется, описывается следующим соотношением:) упллк ,, где , значения проекций радиуса-вектора на m такте; XHM Vrr,ir значения проекций радиуса-вектора на такте после поворота исходной системы координат на элементарный угол поворота, определяемый единицей младшего разряда цифровых интеграторов 20 Приведенное соотношение описывает реобразование координат на плоскоси - поворот исходной системы кооринат на угол рад. Следовательно, после поступления регистр 4 числа импульсов, соотетствукядего заданному углу поворота А. , в реверсивных счетчиках 12, 14 бразуются новые числа, пропорциональные величинам проекций ргщиусавектора в новой системе координат (X/ а в реверсивном счетчике 1 число не изменяется. Сигнал, поступивший из регистра прекратит выдачу импульсов с выхода блока 7. Это преобразование соответ ствует повороту пространственной си темы координат вокруг оси г) на зада ный угол. Следующий поворот может быть произведен вокруг оси . Получаемое в устройстве сокращение длительности операции преобразование координат позволяет в четы ре раза уменьшить потребляемую мощность за счет соответствующего снижения рабочей частоты. Например, для цифрового преобразователя координат на 500 корпусах интегральных микросхем 133 серии тр буется дополнительно затратить 70 корпусов, но снижение тактовой частоты в четыре раза благодаря введению регистра аргумента и комбинационного блока уменьшает потребляемую мощность с 25 Вт до 7,1 Вт (сре няя потребляемая динамическая ьющно на один корпус составляет 50 мВт) При этом количество унифицированных стабилизаторов на 5 Вт снижается с 5 штук до 2, а при весе каждого ста билизатора 300 г экономия в массе составляет 1,1 кг. За время эксплуатации самолета (10-15 лет) 1 кг веса в стоимостном выражении составляет около 2 млн.ру Следовательно, эконр етческий эффект от снижения веса вычислителя з время его эксплуатации составляет около 2,2 млн. руб. Формула изобретения Устройство для преобразования ко ординат, содержащее первый,второй и третий сумматоры, выходы которых соединены с первыми входами одноиме ных реверсивных счетчиков, блок упр ления, первый коммутатор, память, отличающееся тем, что, целью повышения быстродействия в не введены дешифратор, формирователь, регистр аргумента, второй коммутатор, блок коммутаторов, три суммато по модулю два, элемента НЕ, причем выход блока управления соединен со входами формирователя и дешифратора первый выход дешифратора соединен с первым входом регистра аргумента, первый выход которого соединен со входом элемента НЕ и первым входом первого сумматора по модулю два, выход которого соединен с первыми вхоДс1ми второго и третьего сумматоров по модулю два, остальные выходы дешифратора и выходы формирователя соединены со входами второго коммутатора, первый, второй и третий выходы которого соединены с управляющими входами первого, второго и третьего сумматоров, четвертый выход второго коммутатора соединен с управляющими входами памяти, блока Коммутаторов и регистра аргумента второй выход которого соединен со вторым входом первого сумматора по модулю два, группа выходов второго коммутатора соединена с первыми группаили входов памяти, первого коммутатора и блока коммутаторов, вторая группа входов которо го соединена с выходами элемента НЕ, первого, второго и третьего сумматоров по «эдyлю два и первым выходом регистра аргумента, группа выходов блока коммутаторов, соединена со второй группой входов памяти, выходы которой соединены со второй группой входов первого коммутатора,первый и второй выходы которого соединены со вторыми входами соответственно второго и третьего сумматоров по модулю два, первый выход блока коммутаторгав соединен с первым входом первого сум матора и вторым входом первого ревер сивного счетчика, второй выход блока коммутаторов соединен с первым входом второго сумматора и вторым входом второго реверсивного счетчика третий выход блока коммутаторов соединен с первым входом третьего сумматора и вторым входом третьего реверсивного счетчика, второй и третий входы первого сумматора соединены с первыми выходами соответственно второго и третьего реверсивных счетчиков, второй и третий входы второго сумматора соединены соответственно с первым выходом первого реверсивного счетчика и вторым выходом третьего реверсивного счетчика, второй и третий входы третьего сумматора соединены со вторыми выходами соответственно первого и второго реверсивных счетчиков. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 591860, кл. G Об F 15/20, 1976. 2,Авторское свидетельство СССР №568947, кл G 06 F 15/20, 1974 (прототип).
JlfЖ
/7 л


| название | год | авторы | номер документа |
|---|---|---|---|
| Обратимый преобразователь координат | 1982 |
|
SU1035617A1 |
| Устройство для преобразования координат | 1980 |
|
SU898426A1 |
| Устройство для преобразования координат | 1984 |
|
SU1236510A1 |
| Функциональный преобразователь | 1984 |
|
SU1211756A1 |
| Псевдостохастический анализатор спектра | 1985 |
|
SU1278885A1 |
| Устройство для формирования информации на телевизионном индикаторе | 1981 |
|
SU1075298A1 |
| Аппроксимирующий функциональный преобразователь | 1984 |
|
SU1205153A1 |
| Цифровой преобразователь координат | 1980 |
|
SU942004A1 |
| Устройство поворота изображения на экране телевизионного приемника | 1987 |
|
SU1424028A1 |
| Синусно-косинусный функциональный преобразователь | 1981 |
|
SU970357A1 |
A
.
le
Щ
-
7 i A
/V /V
i
/5
Ы
- - -
