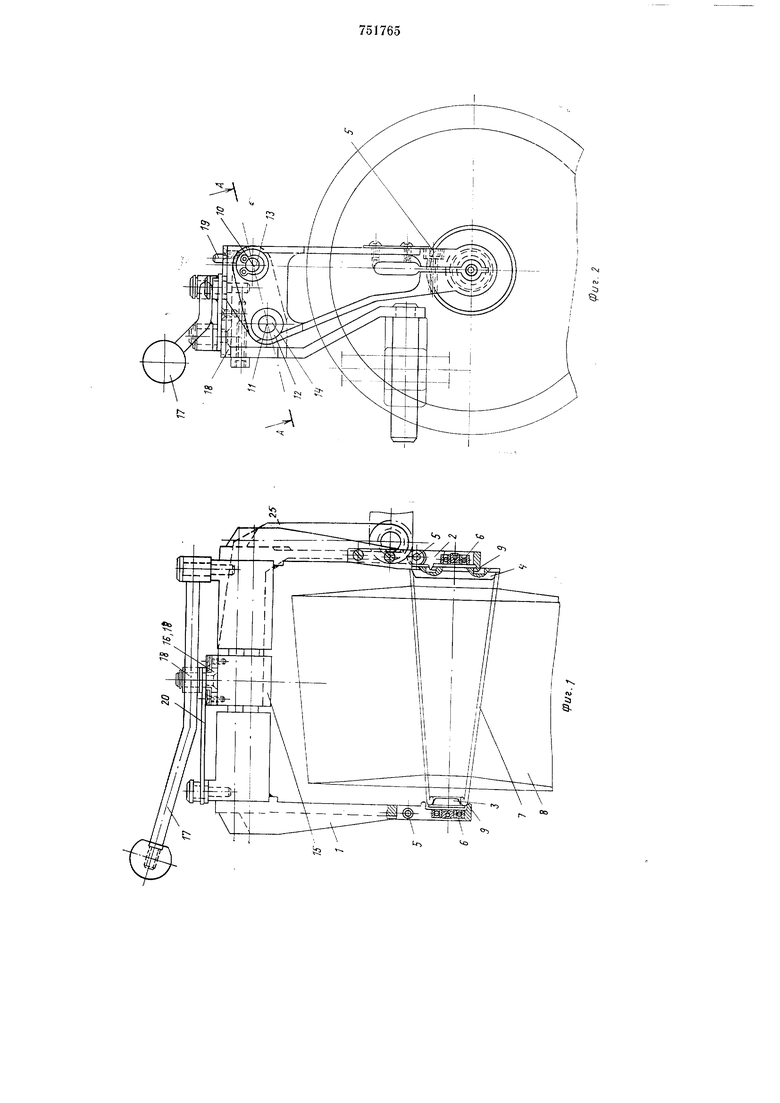
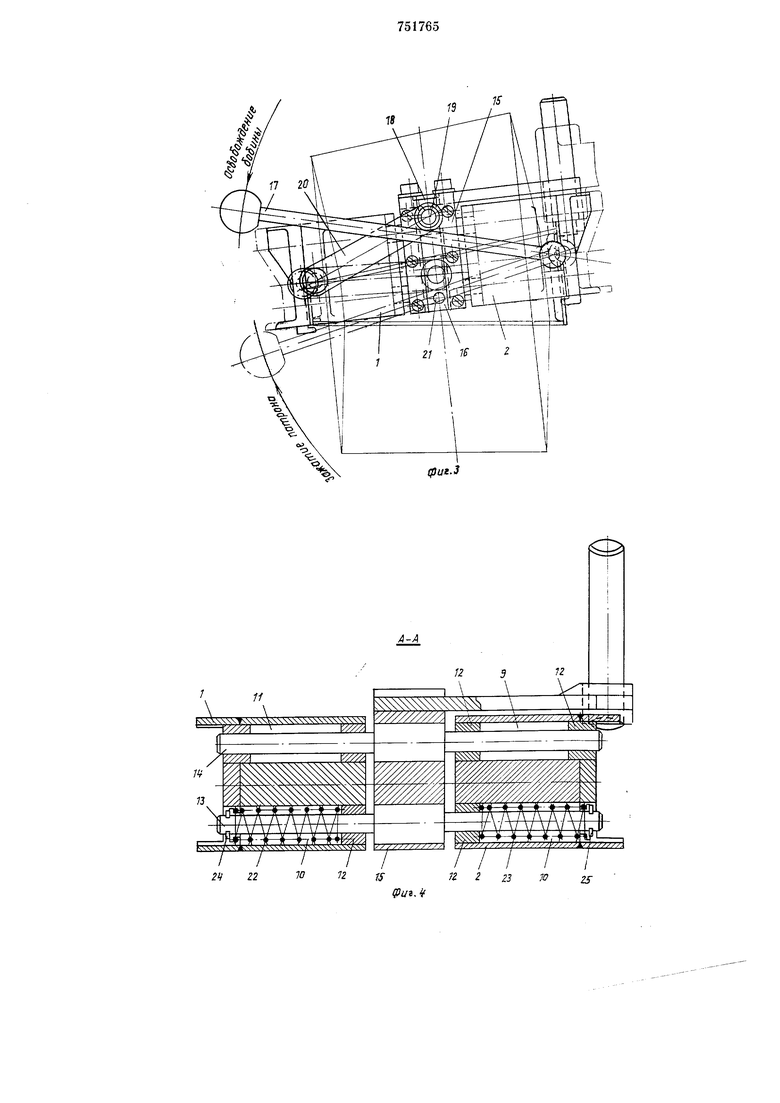
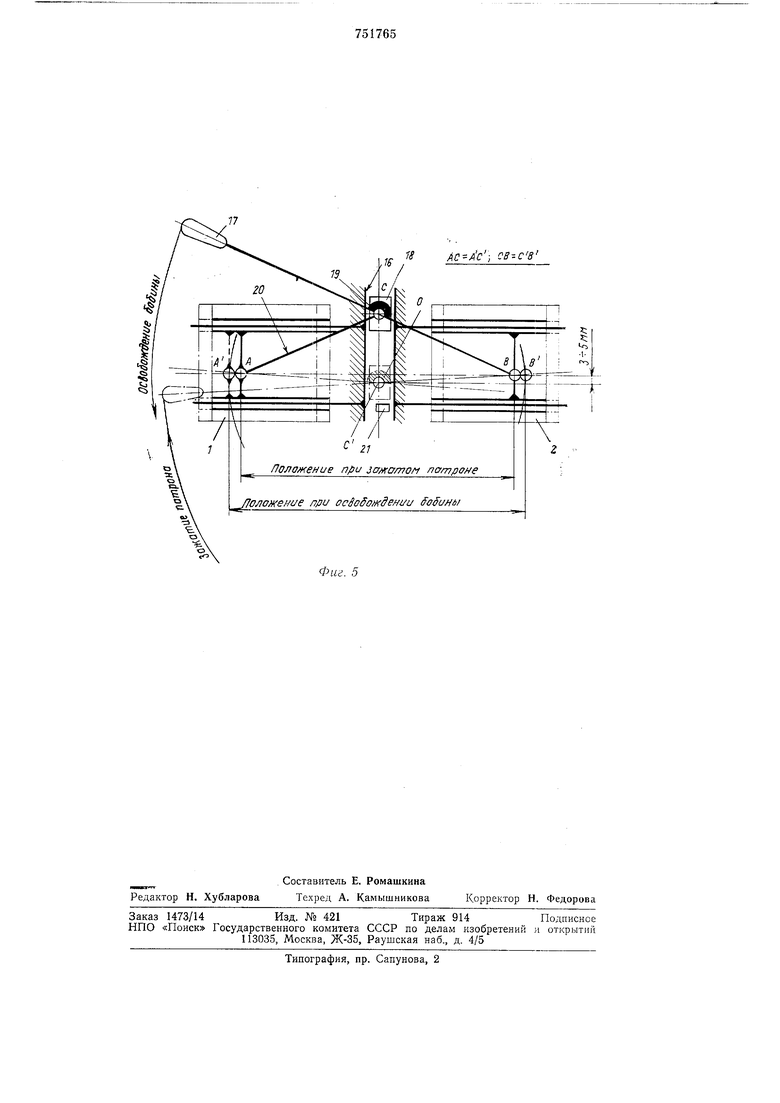
ния подпружиненных рычагов по валу и шпонкам между поверхностями нанранляюнднх шпопок и ступпден нодн1)ужииен ых рычагов необходимо налнчие фуикннонального зазора 3. Недостатком известного бобииодоржатсля является то, что наличие зазора между шпонкой и иазом стуницы нодвижио-о поднружипеппого рычага приводит к относительному смешенню осей врагцаюшпхся н.ентров. Это вызывает перекос зажимного патрона, ноявление осевых усилий и нерсмен1,енпе патрона относительно мотального иалнка нлн ннтеводптеля. Послсдпее приводит к нарушению структуры н: формы памотки, вызывает самонропзвольное выбрасывание патрона нз центров бобиподсржателя. Выполнить данную конструкцию без функционального зазора невозможно, так как не будет обеспечена возможпость псремещення рычагов вдоль вала. Кроме того, в нзвестном бобннодержателе не цредусмотрепы средства, предотвращающие раскрыванне бобинодержателя от случайных осевых нагрузок в процессе памотки бобины, и отсутствует возможность фикснроваппя нодпрун ннеппых рычагов бобинодержателя в разведеппо-М положении в любой момепт иамотки бобииы. Целью изобретения является повЕлшеиис надежностн работы бобннодержатеяя путем предотвращеппя самопроизвольного раскрытия его. Поставленная цель достнгается за счет того, что предлагаемый бобинодержатс,11 дополнительно имеет наиравляюшую ось, параллельную оси натрона, а в рычагах вьгполнены соосные отверстия для ее pasAicщения, при этом нанравляюниге оси закреилены ненодвнжно в оноре, а средство иерсмещения рычагов выполпено в виде кривощипно-ползунного механизма, нштупы которого соединены с рычагамн. Кривошппно-нолзунный механизм имеет камень, шарнирно размещенный па крипошине, а онора, несущая оси, имеет паз, перпендикулярный оси патрона, прп этом камень размещен в пазу свободно п соединен с шатунами. . Средство перемещения рычагов имеет упор, размещенный в зоие «.мертвого ио;10жения крнвощинно-нолзунного механизма. На рычагах в зоне размещеиия цептров выполнены кольцевые выступы. Бобинолтержатель имеет приводиую рукоятку, жестко закрепленную па крпвоитиис. На фиг. 1 изображен предлагаемы бобинодержатель, вид спереди; на фиг. 2 - то же, вид сбоку; на фиг. 3 - то же, внд в плане; на фиг. 4 -разрез А-Л на фиг. 2; на фиг. 5 - кинематическая схема механизма освобождения бобипы. Бобинодержатель имеет Н-образпуЮ форму и может быть устаиовлеп па машине с обеспечением съема наработанных бобнн как вперед, так и назад но отношеипю к iipan.ieiHHO мотального барабаичнка. bo6i иодержатель сг;дсрж:-1т два параллельных иодиру кинеиных рычага -- левьп 1 и иравый 2. Коиструкции иараллельных подпружииенпнх 1)Ы4агов идеитичпы и каждый соответственно включает в себя левый цептр 3 и правый 4, закреилеииые в нараллельиых подпружииеипых рычагах с помощью клеммовых зажпмог; 5. Каждый цептр моьгтируется иа одиом шарикоиодшпппике 6 и обеспечивает фиксироваиие, зажим и вран1,ение натропа 7 в ироцессе иамотки бобииы 8. Каждый из иара;1лс ьиых иодпружгшеппых рычагов выно.тнеи в виде иластии, которые снабжены Колычевыми выстуиами 9, охватывающими виешнюю новерхиость оси вращающегося цеитра. В верхией части иараллельиых нодиружпле1П1Ь х рычагов имеются два отверстия 10 п 11 с запрессованными в пих втулками 12; нрнчем в отверстии 11 каждого параллельного рычага заирессованы две втулки, в отверстп 10 - одиа втулка осями 13 и 14, закреилеииыми в опоре 15, содержащей иоиереч)1ую ианравляющую 16 механизма освобождения бобииы. Причем расстояиие от оси патрона до параллельных паправляюш.нх осей, расстояиие между втулками 12 и их длина оиределяются услов ем заклиииваиия втулок при воздействии силы иа цеитры иатрона. Средство иеременяеиия (;в выиолнено в криво1иииио-ио.1,унпого механизма и включает в себя приводиую рукоятку 17, являюи1у1ося одиоврсмснно кривоиппюм, камеиь 18, кииематически связанный с иомощью шариира 19 с и ату:1ом 20, и упор 21. В зависимости ;;г удобств;; (;бслужива1 пя мехаиизм может быть расположен в горизоитальиой или вертикальной и:юскости. Пз кинематическо схемы кривошииио-ползуниого мехаиизма (фиг. 5) видно, что: точка /1 нрииадле/кит левому иодиружиисниому рычагу; точка В - нравому нодиружиненному рычагу; точка С - камню 18. АС - длина шатуна 20, СВ - длина кривошииа 17, СС - величина иолиого перемещення камия 18 ио ианравляюь ей 16 кронштейна 15. Па осях 13 иомеи1,аются иружины 22 и 23 с упорными шайбами 24 и 25. При этом иружииа 22 оказывается сжатой между втулкой 12 п упорио шайбой 24 и стремится переместить левый подпружиненный рычаг 1 к оноре 15 слева, а пружппа 23, сжатая между втулкой 12 н унорной шайбой 25, тремптся переместить правый нодпружииепный рычаг 2 к опоре 15 справа. Однако при установленном в подиружнлепных рычагах 1 и 2 патропе 7 подпружиненные рычагп к оноре 15 15илотпую пе подходят, между ними обеспечивается зазор до 5-6 мм. Работает бобнноводитель следу1О цим обазом.
Для зажима пзстого патрона необходимо предварительно переместить подпружиненные рычаги 1 и 2 по направляющим осям 13 и 14 относительно опоры влево и вправо на величииу, обеспечиваемую коиструкпней средства неремепхения рычагов. Размеры деталей кривошипно-ползуниого механпзма выбираются такими, чтобы обеспечить свободную устаиовку пустого патроиа и съема иаработаниой бобииы с центров 3 и 4.
Перемещение подпружиненных рычагов 1 и 2 выиолняется рукояткой 17 при ручном съеме нли нажатием иа камень 18 ири автоматическом устройстве съема «па себя. Рукоятка поворачивается до упора 21, подпружине1П1ые рычагн 1 и 2 расходятся в крайние положения, пружипы 22 и 23 максимально сжаты н прижимают кривошни 17 и шатун 20 кривошипно-ползуиного механнзма к упору 21, фпкснруя их в разпедеть ном положении, С камня 18 (фиг. 5) иеремещается ио иаправляюи1;ей 16 опоры 15 до точки С , иересекая при этом осевую ЛОВ, Этот путь СО должен равен мм, Дополпнтельный путь мм за осевую линию АОВ до упора 21 («мертвое положение кривощ1шно-пол.зуппого механизма) обеснечпвает запирапне подпружиненных рычагов в разведенном положении, Зажатие патрона осуществляется при отведении рукоятки 17 н щатупа 20 назад «от себя. При этом иодпружпиенные рычаги 1 и 2 перемен1аются под действием пружин 22 н 23 по параллельным осям 13 п 14 к опоре 15, центры 3 и 4 соответственно входят слева н справа во внутреннюю полость патрона 7 и зажимают его с торцов. Удержание патрона в центрах осуществляется пружинами, усилия и жесткость которых подбираются, исходя из прочности зажимного патрона н условий перемотки. Однако усилия пружины, требуемые для сжатия патрона, пе превышают усилий, развиваемых в известных конструкциях бобинодержателя.
Разработка и сборка бобинодержателя максимально упрощены. Для съема подпружиненных рычагов 1 и 2 с опоры 15 достаточно снять упорные шайбы 24 и 25, Рычаги освобождаются, снимаются с осей 13 и 14, и освобождаются пружины 22 и 23, Вранлающиеся центры 3 и 4 освобождаются с. помощью клеммовых зажимов 5.
б Формула изобретения
1.Бобинодержатель к мотальному устройству, содержа1ипй два иараллельных
подпружинеииых рычага, соосно смонтированных на паправляюп1,ей оси, нараллельной оси патрона, и имеющих центры для его зажима, н средство перемещения рычагов, о т л н ч а ю HUI и с я тем, что, с целью
повыщеппя надежности работы путем предотвращения самопроизвольного раскрытия бобинодержателя, оп дополнительио имеет ианравляюи1ую ось, параллельную осп патрона, а в рычагах выполпены соосиые отвбрстт1я для ее размещения, ири этом направляющие оси закреплены ненодвнжио в опоре, а средство перемещения рычагов выполиопо в виде крнвощнпно-нолзунного механизма, шатуны которого соединены с рыч агами.
2.Бобннодержатель по п, 1, отлпчаюИ1: и и с я тем, что кривошнино-иолзуиный механизм имеет камень, щарнирио разме1цснпь 1 на кривошипе, а опора, несущая
осн, имеет паз, иериендпку,1ярный осн патрона, ири этом камень -размещен в пазу свободно и соедииен с шатунами.
3.Бобинодержатель по пп. 1 и 2, отличающийся тем, что, с целью фиксации
рычагов в разведенном положении, средство перемещения рычагов имеет упор, размеи1,енный в зоне «мертвого положения кривошипно-ползуиного механизма,
4.Бобннодержатель ио пп, 1-3, отлпчающийся тем, что, с целью предотвраИ1ения наматывания нити на центры для зажима патрона, на рычагах в зоне размещения центров выполнены кольцевые выступы,
5.Бобпиодержатель по пп, 1-4, отличающийся тем, что он имеет ириводиую
рукоятку, жестко закрепленную па кривошипе.
Источники информации,
45 принятые во внимание прн экснертнзе
1,Патент ФРГ № 1249134, кл. 76 d, 18, онубл, 1965,
2,Патент ФРГ Х 1560475, кл. 76 d, 18, онубл, 1970,
3,Авторское свидетельство СССР Х9 221892, кл, В 65Н 54/54, 1967 (прототип) ,
i
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для НАСАДКИ И СЪЕМА БОБИН В ОТБЕЛЬНЫХ, КРАСИЛЬНЫХ И СУШИЛЬНЫХ АППАРАТАХ | 1971 |
|
SU307810A1 |
| Регулятор скорости прядильных машин | 1959 |
|
SU129516A1 |
| Устройство для перезаправки нити на мотальной машине | 1986 |
|
SU1375549A1 |
| Универсальный мотальный механизм для прядильных и крутильных машин | 1947 |
|
SU71915A1 |
| БОБИНОДЕРЖАТЕЛЬ | 1992 |
|
RU2015098C1 |
| Устройство для перезаправки мотальной машины | 1980 |
|
SU927704A1 |
| УСТРОЙСТВО для СМЕНЫ БОБИН НА МОТАЛЬНЫХ МАШИНАХ | 1970 |
|
SU269755A1 |
| Ультразвуковой односторонний излучатель | 1957 |
|
SU114053A1 |
| МОТАЛЬНЫЙ МЕХАНИЗМ ДЛЯ ПРЕЦИЗИОННОЙ НАМОТКИ НИТИ СТЕКЛОЖГУТА ИЛИ СТЕКЛОВОЛОКНА | 1969 |
|
SU236703A1 |
| Бобинодержатель | 1987 |
|
SU1437332A1 |
ff
ПЭ
тг
/1
V.
I
