30
СЯ
25
26
оо
оо
05
к
Изобретение относится к текстильной промышленности, касается конструкции бобино- держателя мотальных машин и может быть использовано в производстве химических волокон, стекловолокна и в электротехнической промышленности.
Целью изобретения является улучшение
эксплуатационных свойств и расширение
функциональных возможностей бобинодер; жателя.
Устройство работает следуюш,им образом.
В начальный момент (фиг. 1) рука робота-манипулятора толкателем 27 нажимает на упор 26 вилки 12, которая через оси 11 и 9 поворачивает двуплечие рычаги 10 и перемещает вдоль осей шпинделя 3 толкатель 15, сжимая пружину 18. Тем самым конус 17 перемещается вдоль оси шпинделя от конуса 7, подпружиненные к центру распорки 20 высвобождают патрон 31 изнутри, а схват 28
На фиг. 1 представлено устройство, раз- Ю унимает бобину 30 с бобинодержателя. рез начальный момент съема бобины; наПружиной 23 высвобождаются хвостовики 24
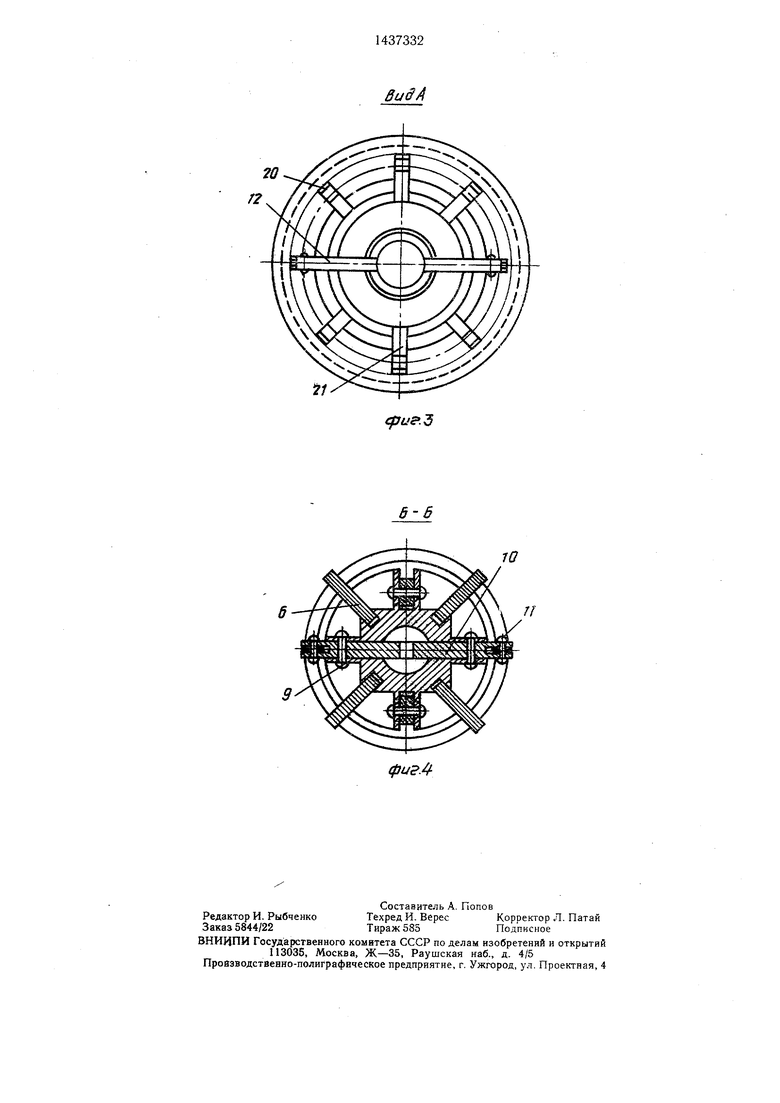
фиг. 2 - то же, в момент установки пустого патрона; на фиг. 3 - вид А на фиг. 2;
на фиг. 4 - разрез Б-Б на фиг. 2.
одного плеча коромысла 21, и коиус 17 фиксируется другим его плечом в упорах 22. При смене бобины (фиг. 2) торец патроУстройство состоит из корпуса 11, в ко- на 31 утапливает хвостовик 24 в паз 5.
коромысла 21 поворачиваются и высвобождаются из упора 22, а конус 17 давит пружиной 18 на распорки 20 (фиг. 1), которые зажимают патрон 31.
тором установлен на подшипниках 2 шпиндель 3 с продольными пазами 4, 5, 6, конусом 7 и осевым отверстием 8. В пазах 4 на осях 9 шарнирно закреплены двуплечие рв)чаги 10, одно плечо каждого из которых соединено осью 11 с вилкой 12, 20 а другое размеп ено в радиальном отверстии 13 шпинделя и контактирует с опорной поверхностью 14 толкателя 15.
При нажатии на вилку 12 свободные плечи рычагов 10 через опорную поверх- п(ч-ть 14 могут перемещать толкатель 15 вдоль оси шпинделя 3 и через штифт 16 от;. имать подвижный конус 17, подпружиненный к конусу 7 пружиной 18. Расположенные в пазах и подпружиненные к
25
В предложенной конструкции упрощена перезаправка бобин при использовании робота-манипулятора на мотальных машинах.
Формула изобретения
Бобинодержатель, содержащий соосно установленные на консольном шпинделе неподвижный и подпружиненный к нему подвижный конусы, зажимные элементы, раз- центру пружинами 19 распорки 20 усилием .JQ мещенные между конусами с возможностью пружины 18 через поверхности конусов 7 радиального перемещения, фиксатор поло- и 17 зажимают патрон изнутри. В пазах 5 жения подпружиненного конуса и средство шарнирно закреплена пара коромысел 21, для его осевого перемещения, имеющее служащих для фиксации подвижного конуса щток, размещенный в центральном отверс- в упорах 22 пружинами 23; для рас- тии шпинделя, отличающийся тем, что, с фиксации служат хвостовики 24, при нажа- эг целью улучшения эксплуатационных свойств тии на которые торцом патрона конус 17 и расширения функциональных возможнос- высвобождается. Пружина 25 возврагцает тей, средство для осевого перемещения средство для осевого перемещения ко- подпружиненного конуса содержит вилку и нуса 17 в нейтральном положении, а упор 26 шарнирно соединенную с ней пару двупле- необходим для лучшего контактирования с чих рычагов, а на боковой поверхности толкателем 27 руки-схвата 28 робота-ма- 40 шпинделя выполнены продольные пазы для нипулятора (не показан).размещения вилки со стороны обслуживаОсвободить патрон из распорок 20 можно ния бобинодержателя, при эт9м рычаги также нажатием На упор 29 толкателя 15.шарнирно установлены на шпинделе в осеНа чертежах показаны также бобина 30вой плоскости с возможностью контактирои патрон 31., вания с толкателем.
S гз J
Устройство работает следуюш,им образом.
В начальный момент (фиг. 1) рука робота-манипулятора толкателем 27 нажимает на упор 26 вилки 12, которая через оси 11 и 9 поворачивает двуплечие рычаги 10 и перемещает вдоль осей шпинделя 3 толкатель 15, сжимая пружину 18. Тем самым конус 17 перемещается вдоль оси шпинделя от конуса 7, подпружиненные к центру распорки 20 высвобождают патрон 31 изнутри, а схват 28
унимает бобину 30 с бобинодержателя. Пружиной 23 высвобождаются хвостовики 24
унимает бобину 30 с бобинодержателя. Пружиной 23 высвобождаются хвостовики 24
одного плеча коромысла 21, и коиус 17 фиксируется другим его плечом в упорах 22. При смене бобины (фиг. 2) торец патрона 31 утапливает хвостовик 24 в паз 5.
В предложенной конструкции упрощена перезаправка бобин при использовании робота-манипулятора на мотальных машинах.
Формула изобретения
J/
cpu9.2
BuSA
| название | год | авторы | номер документа |
|---|---|---|---|
| Бобинодержатель | 1986 |
|
SU1330065A1 |
| Бобинодержатель | 1987 |
|
SU1528715A1 |
| Устройство для намотки нити | 1987 |
|
SU1509336A1 |
| Бобинодержатель | 1988 |
|
SU1564091A1 |
| Устройство для намотки нитевидного материала | 1985 |
|
SU1284922A1 |
| Бобинодержатель | 1988 |
|
SU1567489A1 |
| Устройство для намотки нитевидного материала | 1988 |
|
SU1625801A1 |
| Крутильно-мотальный механизм прядильно-крутильной машины | 1972 |
|
SU484268A1 |
| Устройство для намотки нити | 1988 |
|
SU1586984A1 |
| Автоматическая мотальная машина | 1988 |
|
SU1650548A1 |
Изобретение относится к текстильной промышленности и направлено на улучшение эксплуатационны.х свойств и расширение функциональны.х возможностгй бобино- держателя мотальной машккы. Бобинодер- жатель состоит из полого шпинделя 3 с продольными пазами 4 и неподвижным конусом 7. На шпинделе свободно установлен подпружиненный подвижный конус 17, связанный штифтом 16 с толкателем 15, размещенным в полости шпинделя. Усилие пружины 18 через конусы 7 и 17 передается распорками 20, которые и зажимают патрон изнутри. В пазах 4 на осях 9 шар- нирно закреплены двуплечие рычаги 10, одно плечо каждого из которых соединено осью 11 с вилкой 12, а другое размещено в радиальном отверстии 13 шпинделя и контактирует с опорной поверхностью 14 толкателя 5. Такая конструкция позволяет расфиксировать патрон при обслуживании мотального устройства роботом-манипулятором. 4 ил. С 
20
/
ifrus:3
10
| Бобинодержатель | 1986 |
|
SU1330065A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
