1
Изобретение относится к области автоматизации экспериментальных, исследований, в частности, создания автоматизированных систем управления тех- j нологическими процессами на основе мультимикропроцессорных сетей.
Известна децентрализованная цифровая система управления и сбора информации, в состав которой входит цент- |Q тральный, процессор, центральный пульт управления, блок управления, центральная информационная шина, периферийные процессоры, подключенные параллельно к центральной шине.
Периферийные процессоры расположены на- рабочих местах пользователей и выполняют .ряд специальных функций, а именно, по команде от мини-ЭВМ производят прием информации, ее кон- 20 троль.И выработку управляющих воздействий 1 ,
Центральной частью такой системы является универсальный программный регулятор.25
Известен программный регулятор .
содержащий вычислительное устМ
(con
ройство (микро-ЭВМ, в состав которой входят центральный процессор, постоянною запоминающее устройство, onepa-jQ
,тивное запоминающее устройство и таймер), а .также аналого-цифровой преобразователь с двумя нормирующими усилителями, ряд цифроаналоговых преобразователей, буферную память, формирователь цифровых управляющих сигналов и перепрограммируемое запоминающее устройство, подключенные к устройству ввода-вывода микро-ЭВМ
Однако программный регулятор должен обеспечивать управление различными исполнительными устройствами, включая тиристорные преобразователи, гидравлические сервоклапаны-и многие другие, имеющие характер индуктивной нагрузки. Вышеописанный регулятор не решает этой задачи.
С другой стороны, математическое. обеспечение этого регулятора реализу,ет только пропорциональный закон управления, отсутствует система аварийftofi защиты и обнаружения неисправноети микро-ЭВМ..
Эти недостатки не позволяют расширить динамический диапазон, что снижает точность и качество регулирования технологических npoiffeccoB.
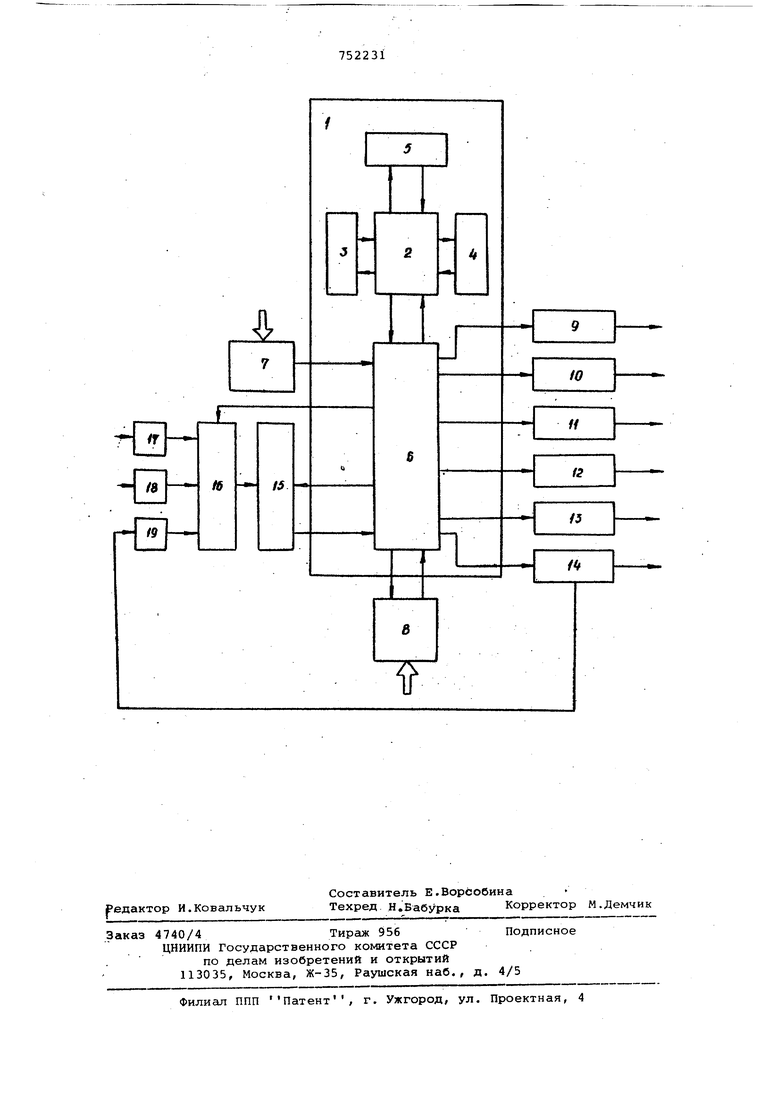
Цель изобретения - повышение точности и качества регулирования. Поставленная цель достигается тем что в программный регулятор, содержащий вычислительное устройство, первый вход которого соединен с выходом . блока буферной памяти, второй вход с выходом аналого-цифрового преобразователя, третий вход - с выходом за поминающего устройства, первый выход вычислительного устройства соединен с первым входом аналого-.цифрового, преобразователя, второй выход - с пе вым входом запоминающего устройства, третий выход - со входом формировате ля управляющих сигналов, четвертый,пятый и шестой выходы - со входами с ответственно первого, второго и третьего цифроаналоговых преобраэова телей, а также первый и второй, норми рующие усилители, введены третий нормирующий усилитель, блок индикаци коммутатор и широтно-импульсный моду лятор, соединенный входом с .седьмым выходом вычислительного устройства, первым выходом - со входом третьего, нормирующего усилителя, выход которо го подключен к первому входу коммута тора, соединенного вторым и третьим входами с выходами соответственно пе вого и второго нормирующих усилите-., лей, четвертым входс5м - с восьмым выходом вычислительного устройства, а выходом - со вторым входом аналого-цифрового преобразователя, девятый выход вычислительного устройст ва подключен ко входу блока индикации. На чертеже изображена блок-схема регулятора. Программный регулятор содержит вы числительное устройство (микро-ЭВМ) 1, центральный процессор 2, постоянн запоминающее устройство 3, оперативное запоминающее устройство 4, та мер 5 г устройство ввода-вывода 6, буферную память 7, запоминающее уртройство 8, формирователь 9 управляющих сигналов, цифроансшоговые преобр . зователи 10-12, блок 13 индикации, ш ротно-импульсный модулятор 14, анало го-цифровой преобразователь 15, коммутатор 16 и нормирующие усилители 17 - 19. Разработанная программа управления и контроля заносится в постоянно запоминающее устройство. Фйрмирование управляющего воздейс вия происходит по закону Jyпpls)(sVдx(s)+к sUэ{s) где - xiel Ualsi-.r Uo.,.la). ; Программы представления корректирующих звеньев реализуют 6 наиболее распространенных законов регулирования:W.O к - пропорциональный(П); интегро-дифференциальный ; Л/2(5) К{Т,ЗП) - .пропорционально-дифференциальный (ПД)у Wats)-. апериодическое звено;/ i 4(е) к1;-4.i| - пропорцио2 няпьно-иннально-интегральный(ПИ) ; ilSb()Шк 5ик|т,5+- +il - пропорционально-интегральнодифференциальный(ПИД). Кроме- того, предусмотрена возможность переключения типа корректирующего звена с П на ПИД и обратно по внешнему сигнсшу в процессе работы Вез остановки машины. Программа работы предусматривает .прием задеиощего воздействия как в цифровой форме через бефферную память 7, так и в аналоговой ферме через нормирующий усилитель 18, трехканальный коммутатор 16 и аналого-цифровой преобразователь 15. Если задающее воздействие подается в цифровой форме, то регулятор может иметь до 3-х обратных связей, а при аналоговом задании - две. Количество каналов обратной связи N устанавливается перед началом работы заданием определенного кода в служебном слове, записанном в запоминающем устройстве 8. Регулятор работает следующим образом. В запоминающее устройство 8 предварительно заносится информация номер выбранного корректирующего устойства, обеспечивающего оптимальное управление объектом, коэффициент усиления, постоянные времени корректирующего звена, период квантования, пороговые максимально допустиглле значения рассогласования, и регулируемой величины, вид реакции на аварию, количество каналов обратной связи, вид задающего воздействия (цифровое или аналоговое) и характер обрабатывае«лх сигналов (знакопостоянные или знакопеременные). По программе, записанной в прстоянном запоминающем устройстве 3, центральный процессор 2 осуществляет прием входной информации из запоминающего, устройства 8 через устройство ввода-вывода 6, размещение ее в оперативном запоминающем устройстве 4, формирование программы, регулятора в соответствии с заданными установками, вычисление ксзффициентов корректирующего устройства и запуск таймера 5. Таймер 5 через фиксированные моменты времени, соответствующие периоду квантования, передает управление программе регулятора, в 5 соответствии с которой центральный процессор 2 принимает задающее воздействие из буферной памяти 7, последовательно подключает выходы нормирующих усилителей 17 - 19 ко входу Q преобразователя 15 посредством коммутатора 16, запускает преобразователь 15, осуществляя тем. самым последовательный опрос каналов обратной связи; вычисляет рассогласование, сравнива- .ет его и регули-руемую величину с пороговыми значениями. Если указанные параметры не выходят за пределы допустимого, центральный процессор 2 вырабатывает управляющее воздействие в соответствии с выбранным корректиру- ющим звеном, которое через устройство ввода-вывода 6 подается на формирователь 9 и на модулятор 14, откуда поступает на объект управления. При этом сигнал в виде напряжения, про- 25 порционального токовому выходному сигналу, с выхода модулятора 14 поступает на вход нормирующего усилителя 19i организуя обратную связь по току, что позволяет значительно улучшить точ- 30 ноеть и качество регулирования в широком частотном диапазоне.
Кроме того, центральный процессор 2 через устройство ввода-вывода 6 выдает информацию на преобразователи 35 10-12 для регистрации задающего воздействия, рассогласования и регулируемой величины, а также на блок 13 индикации, что позволяет повысить безопасность работы автоматизированной д системы управления технологическими процессами.
Повышение точности и качества регулирования технологическими процессами в предлагаемом регуляторедостига-д, ется созданием унифицированногс регуляуора сбольшим набором законов управле-. ни я , регулируемых программным методом; простотой сопряжения, с вычислительными машинами верхнего уровня в иерархичес( Ьих системах управления; возможностью автоматического изменения режимов работы, и установки коэффициентов по командам ЭВМ верхнего уровня; возможностью- использования цифровых программных устройств без дополнительных цифроаналоговых преобразователей; простотой и высокой точностью задания переменных коэффициентов настройки; повышением стабильности временных характеристик; высокой точностью обработки информации; сочетанием малой стоимости стандартного изделия массовогО производства с гибкостью заказного устройства.
Формула изобретения
Программный регулятор, содержащий |Вычислительное устройство, первый вход которого соединен с выходом блока буферной памяти, второй вход с выходом аналого-цифрового преобразователя, третий вход - с выходом запоминающего устройства, первый выход вычислительного устройства соеди:нен с первым входом аналого-цифрового преобразователя, второй выход - с первым входом запомингиощего устройства, третий выход - со входом формирователя управляющих сигналов, четвертый , пятый и шестой выходы - сб. входами соответственно первого, второго и третьего цифроаналоговых преобразователей, а также первый и второй нормирующие усилители-, отличающийся тем, что, с целью повышения точности и качества регулирования, в регулятор введены третий нормирующий усилитель, блок индикации, коммутатор и широтно-, импульсный модулятор, соединенный входом с седькым выходом вычислительного устройства, а первыМ выходом - со входом третьего нормирующего усилителя, выход которого подключен к первому входу коммутатора, соединенного вторым и третьим входами и выходами соответственно первого и второго нормирующих усилителей, четвертым входом с восьмым выходом вычислительного устройства, а выходом - со вторым входом анашого-цифрового преобразователя, девятый выход вычислительного устройства подключен ко входу блока индикации
Источники информации, принятые во внимание при экспертизе
1.Децентрализованная цифровая система, управления и сбора информации, ЭЙ,-Приборы и элементы автоматики , 1976, 31.
2.Цифровой регулятор с к«кро-ЭВМ, ЭЙ,-Приборы и элементы автоматики
и вычислительной техники , 1975. 25, (прототипК
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ИНДИКАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2206872C2 |
| ЦИФРОВОЙ РЕГУЛЯТОР ДЛЯ МНОГОДВИГАТЕЛЬНОГО ЭЛЕКТРОПРИВОДА | 1992 |
|
RU2071635C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2170409C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ МЕТАЛЛИЧЕСКИХ КОНСТРУКЦИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2339938C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ БОРТОВОЙ ИНДИКАТОР | 2000 |
|
RU2162204C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ВЫЧИСЛИТЕЛЬНЫЙ КОМПЛЕКС ДЛЯ ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2008 |
|
RU2399088C2 |
| УПРАВЛЯЮЩИЙ АППАРАТНО-ПРОГРАММНЫЙ КОМПЛЕКС ДЛЯ ОБРАБОТКИ РАДИОЛОКАЦИОННОЙ ИНФОРМАЦИИ | 2001 |
|
RU2222028C2 |
| Измеритель перенапряжений электрохимических процессов | 1986 |
|
SU1370624A1 |
| Электрогидравлическая следящая система стенда | 1985 |
|
SU1272820A1 |
| УПРАВЛЯЮЩАЯ ЭВМ | 2005 |
|
RU2316807C2 |