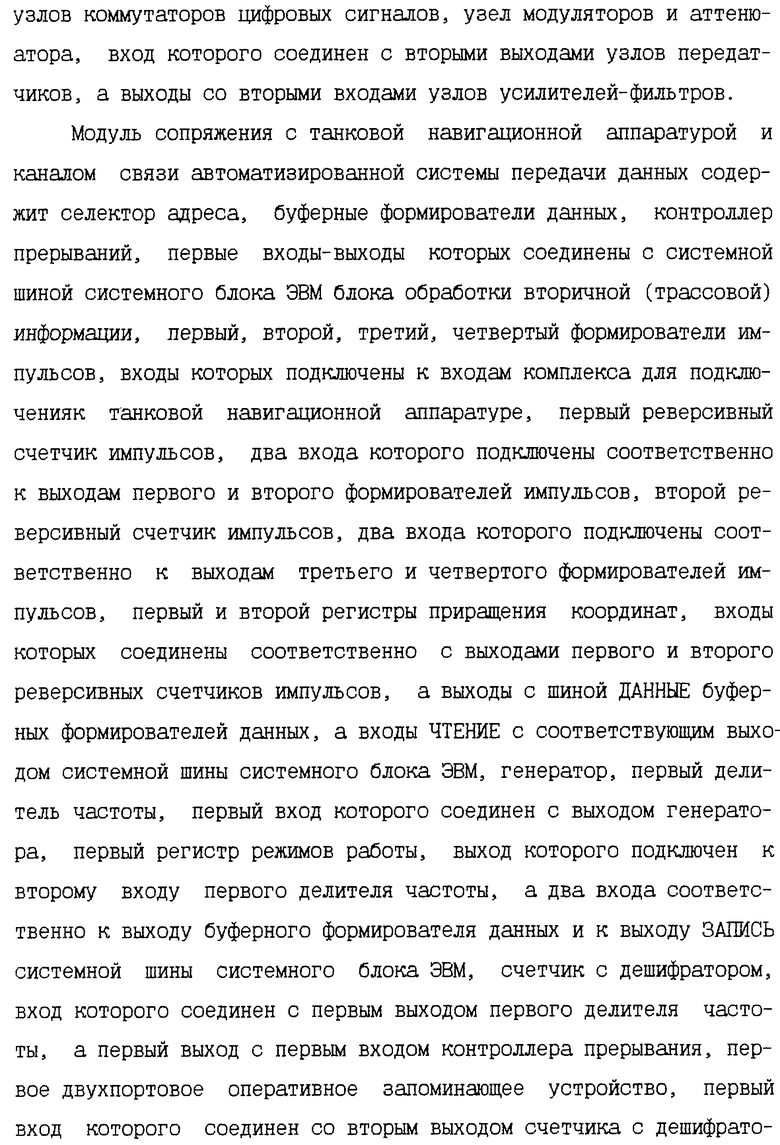
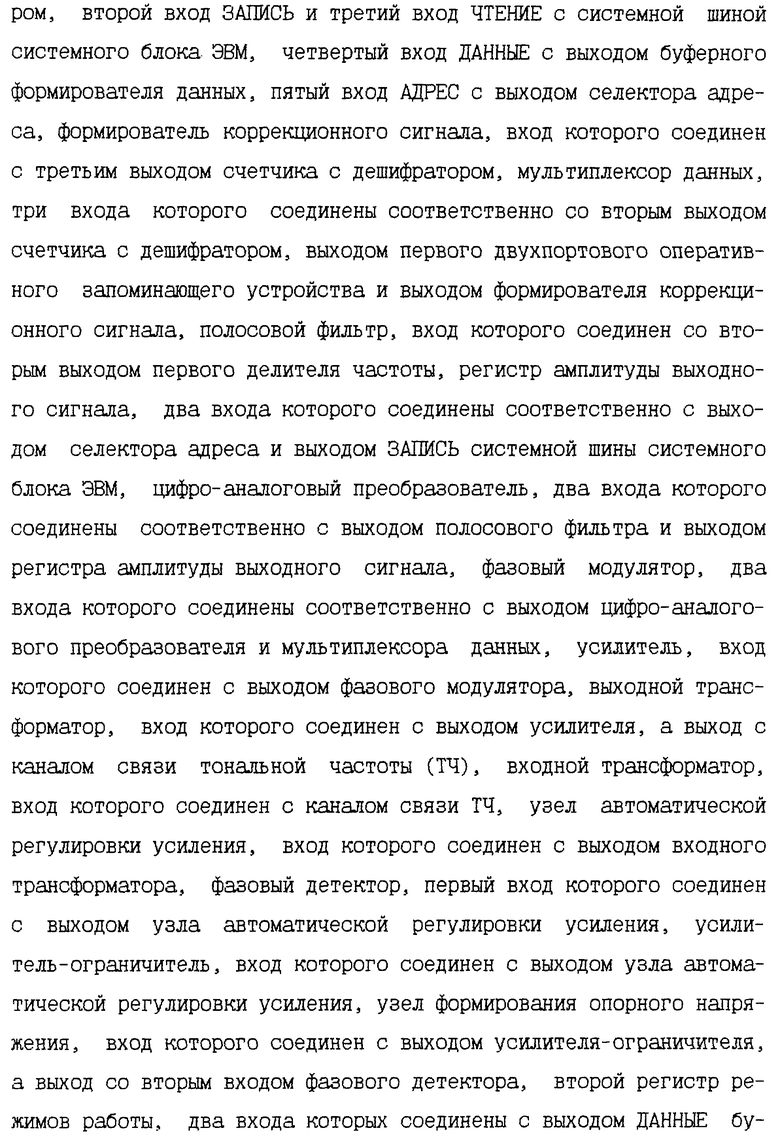
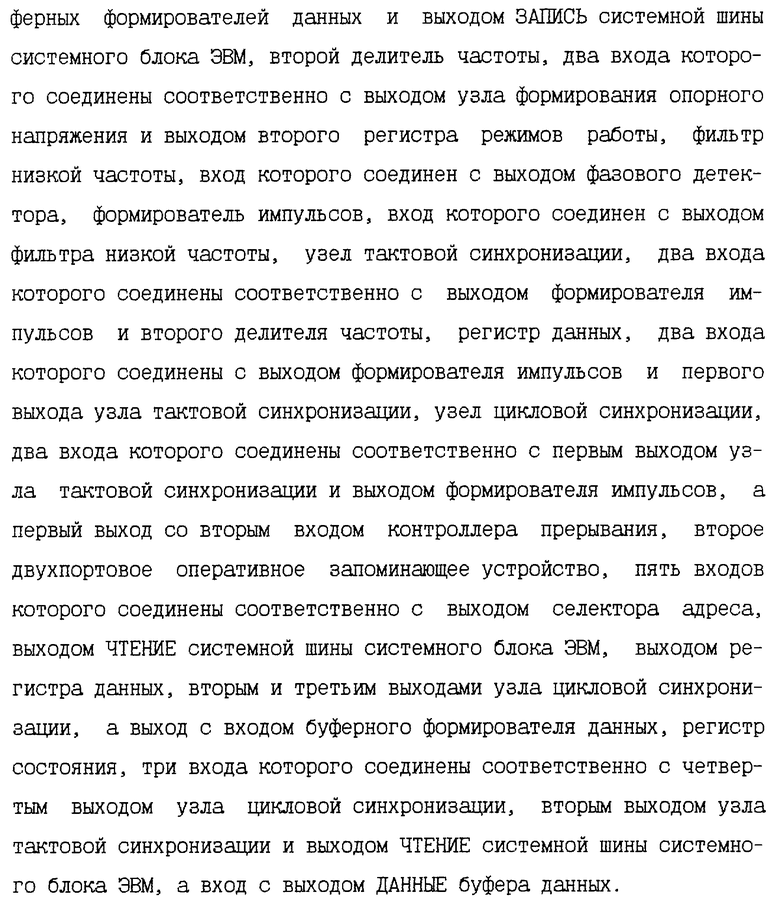
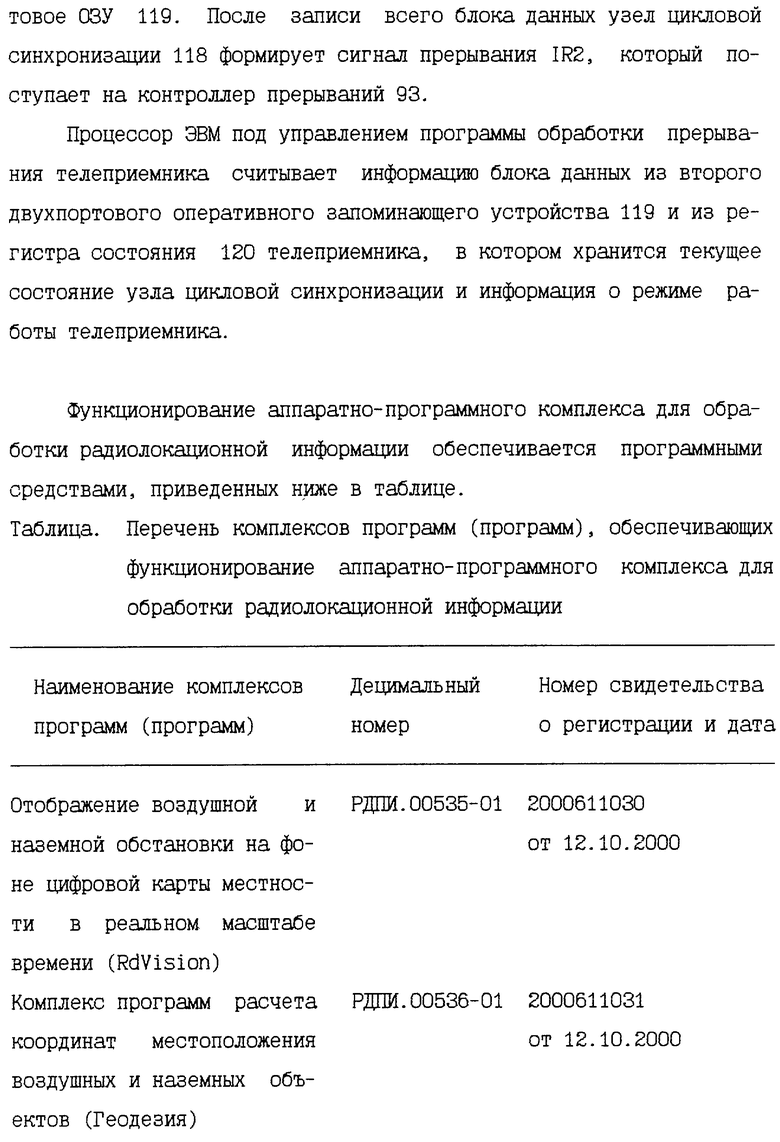
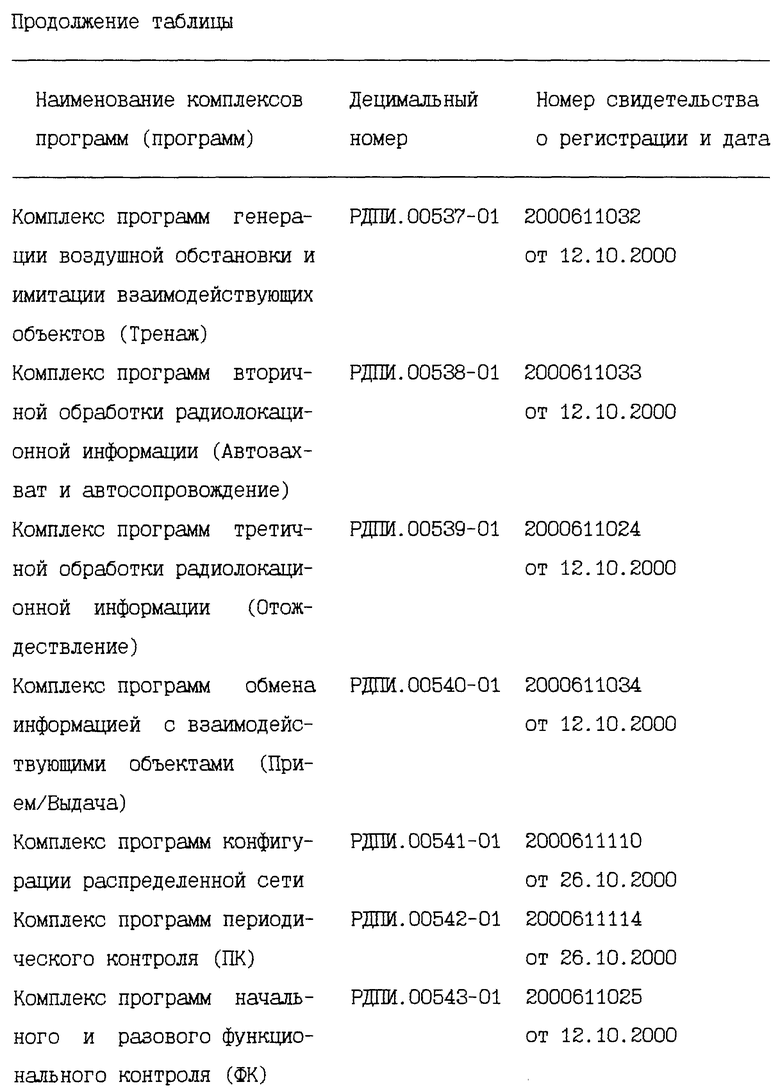
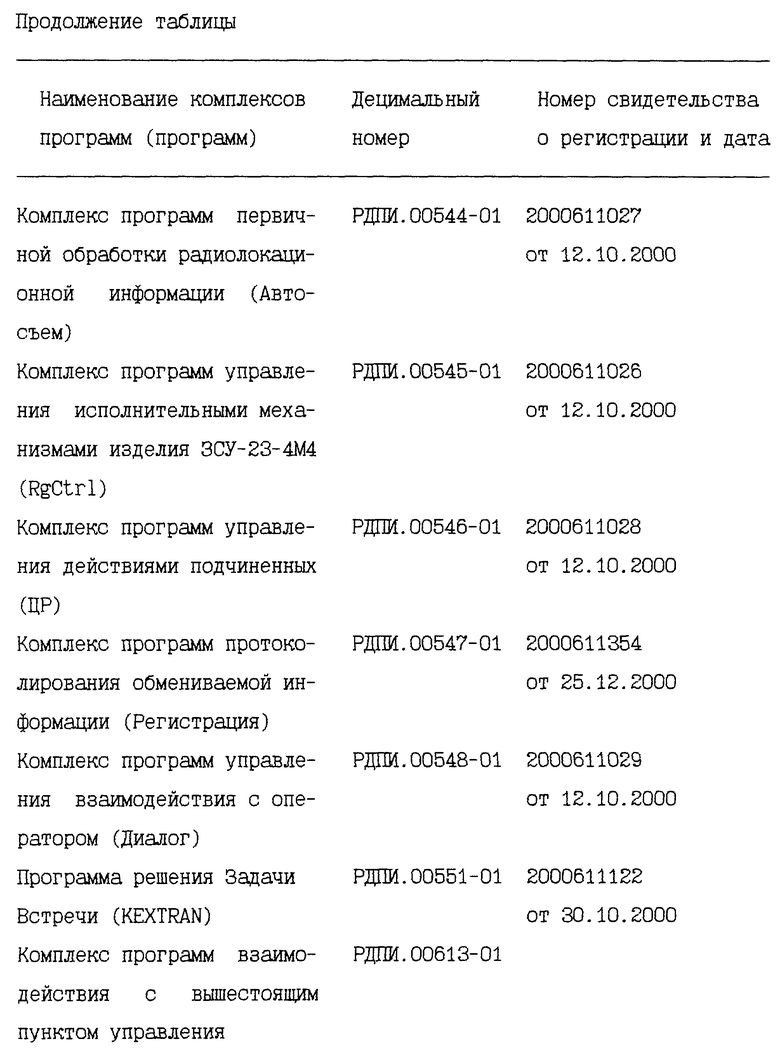
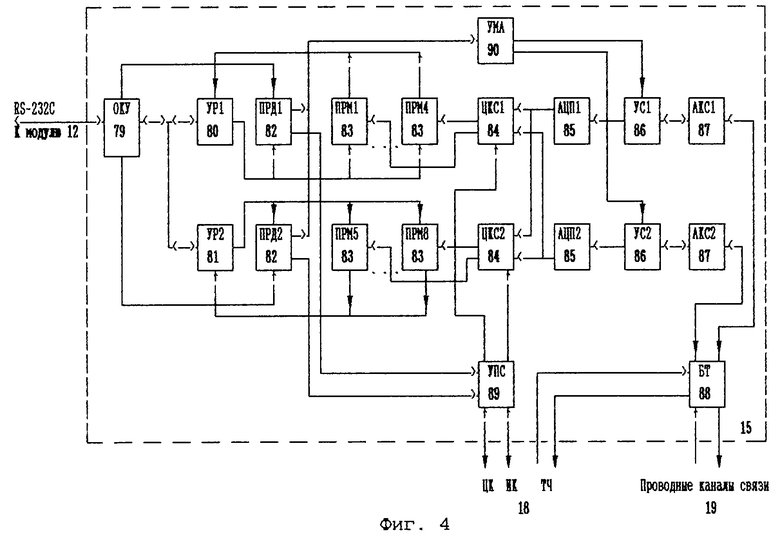
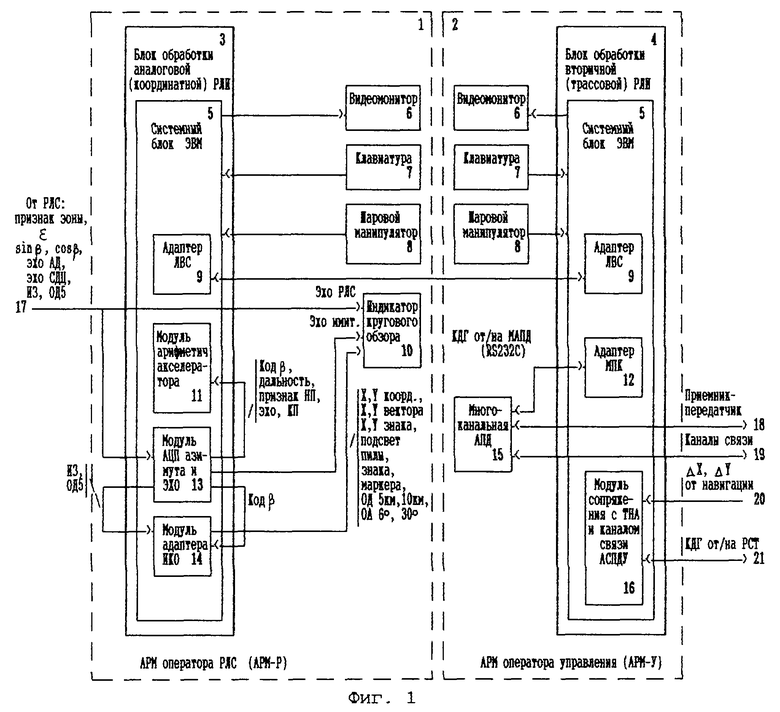
1. Управляющий аппаратно-программный комплекс для обработки радиолокационной информации, состоящий из двух блоков: блока обработки аналоговой координатной радиолокационной информации (РЛИ) и блока обработки вторичной трассовой радиолокационной информации, выполненных на базе Intel-совместимых электронных вычислительных машин (ЭВМ), содержащих системный блок с набором модулей стандартной конфигурации, и подключенных к каждому системному блоку видеомонитора, клавиатуры и шарового манипулятора, к системным блокам обеих ЭВМ подключены дополнительные модули адаптеров локальной вычислительной сети, соединенные между собой, к системному блоку ЭВМ блока обработки аналоговой координатной РЛИ подключен модуль арифметического акселератора, а к системному блоку ЭВМ блока обработки вторичной трассовой РЛИ модуль адаптера мультиплексного канала, а также содержащий индикатор кругового обзора (ИКО), соединенный первым входом с первым входом комплекса, отличающийся тем, что управляющий аппаратно-программный комплекс в блоке обработки аналоговой координатной РЛИ дополнительно содержит размещенный в конструктиве системного блока ЭВМ модуль аналого-цифровых преобразователей (АЦП) азимута и эхо, первый вход которого соединен с первым входом комплекса, первый выход с модулем арифметического акселератора блока обработки аналоговой координатной РЛИ, а второй выход со вторым входом индикатора кругового обзора, размещенный в конструктиве системного блока ЭВМ модуль адаптера индикатора кругового обзора, первый и второй входы которого соединены с третьим и четвертым выходами модуля аналого-цифровых преобразователей азимута и эхо, а выход с третьим входом индикатора кругового обзора, многоканальную аппаратуру передачи данных (МАПД), первый вход-выход которой подключен к входу-выходу модуля адаптера мультиплексного канала блока обработки вторичной трассовой РЛИ, а второй и третий входы-выходы соответственно к первым и вторым входам-выходам комплекса подключения к приемникам-передатчикам и штатным каналам связи, размещенный в конструктиве системного блока ЭВМ блока обработки вторичной трассовой РЛИ модуль сопряжения с танковой навигационной аппаратурой (ТНА) и каналом связи автоматизированной системы передачи данных АСПДУ, первые вход и вход-выход которого соединены соответственно со вторым входом и третьим входом-выходом комплекса, внутренняя шина модуля адаптера индикатора кругового обзора подключена к системной шине системного блока ЭВМ блока обработки аналоговой координатной РЛИ, а внутренняя шина модуля сопряжения с танковой навигационной аппаратурой и каналом связи автоматизированной системы передачи данных к системной шине системного блока ЭВМ блока обработки вторичной трассовой РЛИ, причем многоканальная аппаратура передачи данных содержит оконечный узел, выполняющий обмен пакетами данных в соответствии с процедурой обмена, первый вход-выход которого соединен с первым входом-выходом двунаправленного канала последовательного интерфейса RS-232С МАПД, первый и второй узлы регистрации, первый вход-выход которых соединен со вторым входом-выходом оконечного узла, первый и второй узлы передатчиков, первый вход которых соединен соответственно с первым и вторым выходами оконечного узла, с первого по восьмой узлы приемников, первые входы и выходы которых соединены со вторыми выходами и входами соответствующих узлов регистрации, первый и второй узлы коммутаторов цифровых сигналов, первые выходы которых соединены со вторыми входами соответственно с первого по восьмой узлов приемников, первый и второй узлы аналого-цифровых преобразователей, выходы которых соединены соответственно с первым и вторым входами узлов коммутаторов цифровых сигналов, узлы усилителей-фильтров, первый выходы которых соединены со входами узлов аналого-цифровых преобразователей, узлы коммутаторов аналоговых сигналов, первые входы-выходы которых соединены с входом-выходом узлов усилителей-фильтров, узел трансформаторов, первые входы-выходы которых соединены со вторыми входами-выходами узлов коммутаторов аналоговых сигналов, вторые и третьи входы-выходы с вторыми и третьими входами-выходами тональной частоты (ТЧ) и проводными каналами связи МАПД, узел преобразования сигналов для импульсного и цифрового каналов (ИК и ЦК), первые входы-выходы которого соединены с входами-выходами ИК МАПД, вторые входы-выходы соединены с входами-выходами ЦК МАПД, третьи входы с первыми выходами узлов передатчиков, третьи выходы с третьими входами узлов коммутаторов цифровых сигналов, узел модуляторов и аттенюатора, вход которого соединен с вторыми выходами узлов передатчиков, а выходы со вторыми входами узлов усилителей-фильтров.2. Управляющий аппаратно-программный комплекс по п.1, отличающийся тем, что модуль аналого-цифровых преобразователей азимута и эхо содержит имитатор импульсов запуска (ИЗ) и пятикилометровых отметок дальности (ОД5), первый коммутатор, два первых входа которого соединены соответственно с двумя выходами имитатора ИЗ и ОД5, третий и четвертый входы с выходами ИЗ и ОД5 радиолокационной станции (РЛС), пятый с первой цепью шины управления имитатора, а два выхода соответственно с входами ИЗ и ОД5 модуля адаптера ИКО, имитатор эхо-сигнала, два входа которого соединены соответственно с выходом ИЗ первого коммутатора и второй цепью шины управления имитатором, схему ИЛИ, два входа которой соединены соответственно с выходом имитатора эхо и выходом ЭХО амплитудного детектора (ЭХО АД) радиолокационной станции (РЛС), первый фильтр низких частот, вход которого соединен с выходом схемы ИЛИ, дифференциальный усилитель, два входа которого соединены соответственно с выходом схемы ИЛИ и первого фильтра низких частот, второй фильтр низких частот, вход которого соединен с выходом дифференциального усилителя, аналого-цифровой преобразователь эхо-сигнала, вход которого соединен с выходом второго фильтра низких частот, цифровой интегратор, вход которого соединен с выходом АЦП эхо-сигнала, первая цифровая линия задержки, вход которой соединен с выходом цифрового интегратора, вторая цифровая линия задержки, вход которой соединен с выходом первой цифровой линии задержки, цифровой накопитель, два входа которого соединены соответственно с выходом цифрового интегратора и второй цифровой линии задержки, сумматор выделения отметок целей, два входа которого соединены соответственно с выходом первой цифровой линии задержки и выходом цифрового накопителя, кварцевый генератор, выход которого соединен с входом имитатора ИЗ и ОД5, счетчик дальности, два входа которого соединены соответственно с выходом кварцевого генератора и выходом ИЗ РЛС, первую схему обнаружения пачек отметок, два входа которой соединены соответственно с выходом сумматора выделения отметок целей и выходом счетчика дальности, схему управления записью данных, два первых входа которой соединены соответственно с выходом первой схемы обнаружения пачек отметок и выходом счетчика дальности, а два выхода соответственно с входом ЗАПИСЬ D и β модуля арифметического акселератора и входом ЗАПИСЬ β модуля адаптера ИКО, аналоговый компаратор, вход которого соединен с выходом ЭХО селектора движущихся целей (СДЦ) РЛС, третью линию задержки, вход которой соединен с выходом аналогового компаратора, вторую схему обнаружения пачек отметок, два входа которой соединены соответственно с выходами счетчика дальности и третьей линии задержки, а выход с третьим входом схемы управления записью данных, первый амплитудный детектор, вход которого соединен с выходом сигнала sinβ РЛС, второй амплитудный детектор, вход которого соединен с выходом cosβ РЛС, фазовый детектор, три входа которого соединены соответственно с шиной опорного напряжения, выходами sinβ и cosβ РЛС, функциональный аналого-цифровой преобразователь сигналов датчика азимута в код, два входа которого соединены соответственно с выходами первого и второго амплитудных детекторов, регистр кода азимута, два входа которого соединены соответственно с выходами фазового детектора и функционального АЦП сигналов датчика азимута в код, имитатор вращения, вход которого соединен с выходом кварцевого генератора, второй коммутатор, три входа которого соединены соответственно с выходом регистра кода азимута, имитатора вращения и шиной управляющего сигнала имитатора, третий коммутатор, два входа которого соединены с выходом счетчика дальности, третий вход с выходом второго коммутатора, а выход соединен с входом D или β модуля адаптера ИКО.3. Управляющий аппаратно-программный комплекс по п.1, отличающийся тем, что модуль адаптера индикатора кругового обзора содержит дешифратор адреса, два входа которого подключены к шинам адреса и управления системного блока ЭВМ блока обработки аналоговой координатной РЛИ, распределитель импульсов, три входа которого соединены с выходами модуля имитатора аналоговой воздушной обстановки или от радиолокационной станции, а четвертый вход - с выходом модуля аналого-цифровых преобразователей азимута и эхо, регистр кода вектора скорости, регистр управления вектором, регистр координат цели, регистр кода дальности развертки, регистр управления знаком, первые входы которых соединены с системной шиной данных системного блока ЭВМ блока обработки аналоговой координатной РЛИ, а второй вход с выходом дешифратора адреса, регистр кода азимута, два входа которого соединены с выходами модуля аналого-цифровых преобразователей азимута и эхо и модуля имитатора аналоговой воздушной обстановки, источник постоянного опорного напряжения, формирователь пилообразного напряжения развертки, два входа которого соединены с выходом регистра кода дальности развертки и первым выходом распределителя импульсов, инвертор, вход которого соединен с выходом дешифратора адреса, преобразователь кода азимута, вход которого соединен с выходом регистра кода азимута, формирователь пилообразного напряжения вектора, два входа которого соединены с выходом регистра управления вектором и вторым выходом распределителя импульсов, коммутатор кода Х координаты, два входа которого соединены соответственно с первым выходом регистра координат цели и первым выходом преобразователя кода азимута, коммутатор кода Y координаты, два входа которого соединены соответственно со вторым выходом регистра координат цели и со вторым выходом преобразователя кода азимута, коммутатор опорного напряжения, два входа которого соединены соответственно с выходом источника постоянного опорного напряжения и формирователя пилообразного напряжения развертки, таймер, вход которого соединен с выходом инвертора, цифроаналоговый преобразователь кода Х вектора, два входа которого соединены соответственно с первым выходом регистра кода вектора скорости и с выходом формирователя пилообразного напряжения вектора, цифроаналоговый преобразователь кода Y вектора, два входа которого соединены соответственно со вторым выходом регистра кода вектора скорости и выходом формирователя пилообразного напряжения вектора, цифроаналоговый преобразователь кода Х координаты, два входа которого соединены соответственно с выходом коммутатора кода Х координаты и выходом коммутатора опорного напряжения, цифроаналоговый преобразователь кода Y координаты, два входа которого соединены соответственно с выходом коммутатора кода Y координаты и выходом коммутатора опорного напряжения, элемент совпадения, два входа которого соединены соответственно с выходом дешифратора адреса и выходом таймера, первый формирователь уровня, два входа которого соединены соответственно с выходом регистра управления знаком и третьим выходом распределителя импульсов, а выход с входом индикатора кругового обзора, второй формирователь уровня, вход которого соединен с четвертым выходом распределителя импульсов, а выход с входом индикатора кругового обзора, третий формирователь уровня, вход которого соединен с третьим выходом преобразователя кода азимута, а выход с входом индикатора кругового обзора, сумматор напряжения Х координаты, два входа которого соединены соответственно с выходом цифро-аналогового преобразователя кода Х вектора и выходом цифро-аналогового преобразователя кода Х координаты, а выход с входом индикатора кругового обзора, сумматор напряжения Y координаты, два входа которого соединены соответственно с выходом цифро-аналогового преобразователя кода Y вектора и выходом цифро-аналогового преобразователя кода Y координаты, а выход с входом индикатора кругового обзора, формирователь напряжения знака, три входа которого соединены соответственно с выходом регистра управления знаком, схемы совпадения и пятым выходом распределителя, а выходы с входами индикатора кругового обзора, четвертый формирователь уровня, вход которого соединен с первым выходом распределителя импульсов, а выход с входом индикатора кругового обзора.4. Управляющий аппаратно-программный комплекс по п.1, отличающийся тем, что модуль сопряжения с танковой навигационной аппаратурой и каналом связи автоматизированной системы передачи данных содержит селектор адреса, буферные формирователи данных, контроллер прерываний, первые входы-выходы которых соединены с системной шиной системного блока ЭВМ блока обработки вторичной трассовой информации, первый, второй, третий, четвертый формирователи импульсов, входы которых подключены к входам комплекса для подключения к танковой навигационной аппаратуре, первый реверсивный счетчик импульсов, два входа которого подключены соответственно к выходам первого и второго формирователей импульсов, второй реверсивный счетчик импульсов, два входа которого подключены соответственно к выходам третьего и четвертого формирователей импульсов, первый и второй регистры приращения координат, входы которых соединены соответственно с выходами первого и второго реверсивных счетчиков импульсов, а выходы с шиной ДАННЫЕ буферных формирователей данных, а входы ЧТЕНИЕ с соответствующим выходом системной шины системного блока ЭВМ, генератор, первый делитель частоты, первый вход которого соединен с выходом генератора, первый регистр режимов работы, выход которого подключен к второму входу первого делителя частоты, а два входа соответственно к выходу буферного формирователя данных и к выходу ЗАПИСЬ системной шины системного блока ЭВМ, счетчик с дешифратором, вход которого соединен с первым выходом первого делителя частоты, а первый выход с первым входом контроллера прерывания, первое двухпортовое оперативное запоминающее устройство, первый вход которого соединен со вторым выходом счетчика с дешифратором, второй вход ЗАПИСЬ и третий вход ЧТЕНИЕ с системной шиной системного блока ЭВМ, четвертый вход ДАННЫЕ с выходом буферного формирователя данных, пятый вход АДРЕС с выходом селектора адреса, формирователь коррекционного сигнала, вход которого соединен с третьим выходом счетчика с дешифратором, мультиплексор данных, три входа которого соединены соответственно со вторым выходом счетчика с дешифратором, выходом первого двухпортового оперативного запоминающего устройства и выходом формирователя коррекционного сигнала, полосовой фильтр, вход которого соединен со вторым выходом первого делителя частоты, регистр амплитуды выходного сигнала, два входа которого соединены соответственно с выходом селектора адреса и выходом ЗАПИСЬ системной шины системного блока ЭВМ, цифроаналоговый преобразователь, два входа которого соединены соответственно с выходом полосового фильтра и выходом регистра амплитуды выходного сигнала, фазовый модулятор, два входа которого соединены соответственно с выходом цифроаналогового преобразователя и мультиплексора данных, усилитель, вход которого соединен с выходом фазового модулятора, выходной трансформатор, вход которого соединен с выходом усилителя, а выход с каналом связи тональной частоты ТЧ, входной трансформатор, вход которого соединен с каналом связи ТЧ, узел автоматической регулировки усиления, вход которого соединен с выходом входного трансформатора, фазовый детектор, первый вход которого соединен с выходом узла автоматической регулировки усиления, усилитель-ограничитель, вход которого соединен с выходом узла автоматической регулировки усиления, узел формирования опорного напряжения, вход которого соединен с выходом усилителя-ограничителя, а выход со вторым входом фазового детектора, второй регистр режимов работы, два входа которых соединены с выходом ДАННЫЕ буферных формирователей данных и выходом ЗАПИСЬ системной шины системного блока ЭВМ, второй делитель частоты, два входа которого соединены соответственно с выходом узла формирования опорного напряжения и выходом второго регистра режимов работы, фильтр низкой частоты, вход которого соединен с выходом фазового детектора, формирователь импульсов, вход которого соединен с выходом фильтра низкой частоты, узел тактовой синхронизации, два входа которого соединены соответственно с выходом формирователя импульсов и второго делителя частоты, регистр данных, два входа которого соединены с выходом формирователя импульсов и первого выхода узла тактовой синхронизации, узел цикловой синхронизации, два входа которого соединены соответственно с первым выходом узла тактовой синхронизации и выходом формирователя импульсов, а первый выход со вторым входом контроллера прерывания, второе двухпортовое оперативное запоминающее устройство, пять входов которого соединены соответственно с выходом селектора адреса, выходом ЧТЕНИЕ системной шины системного блока ЭВМ, выходом регистра данных, вторым и третьим выходами узла цикловой синхронизации, а выход с входом буферного формирователя данных, регистр состояния, три входа которого соединены соответственно с четвертым выходом узла цикловой синхронизации, вторым выходом узла тактовой синхронизации и выходом ЧТЕНИЕ системной шины системного блока ЭВМ, а вход с выходом ДАННЫЕ буфера данных.