I
Изобретение относится к машиностроению, в частности, к конструкции кривошипа прессов.
Известен привод кривошипного пресса, содержаший установленный на станине асинхронный электродвигатель со статором в виде сегментов и плоским дискообразным ротором, кинематически связанным с маховиком, соединенным муфтой с кривошипным валом пресса .
Известному приводу присуш,и недостатки, обусловленные отсутствием возможности регулирования скорости запаса энергии и скольжения привода, что приводит к завышению энергетических возможностей и размеров маховика, а также к аварийным заклиниваниям пресса.
Цель изобретения - уменьшение габаритов, повышение надежности и производительности привода.
Для этого привод пресса снабжен жестко закрепленными на кривошипном валу кулачками и установленными на станине двуплечими рычагами, одно плечо каждого из которых связано через толкатель соответственно с одним из упомянутых кулачков, второе шарнирно соединено с одним
из сегментов статора, причем профиль кулачков ограничен поверхностью, определяемой следуюшей зависимостью
-д,.,.,
где Дг- ход толкателя, определяемый изме нением радиуса кулачка;
Um-cKOpocTb бегушего поля в электродвигателе;&н номинальное скольжение электродви
гателя; 10 СОд -угловая скорость вращения ротора
электродвигателя;
Ншш-минимальное расстояние от сегментов статора до центра вращения ротора;
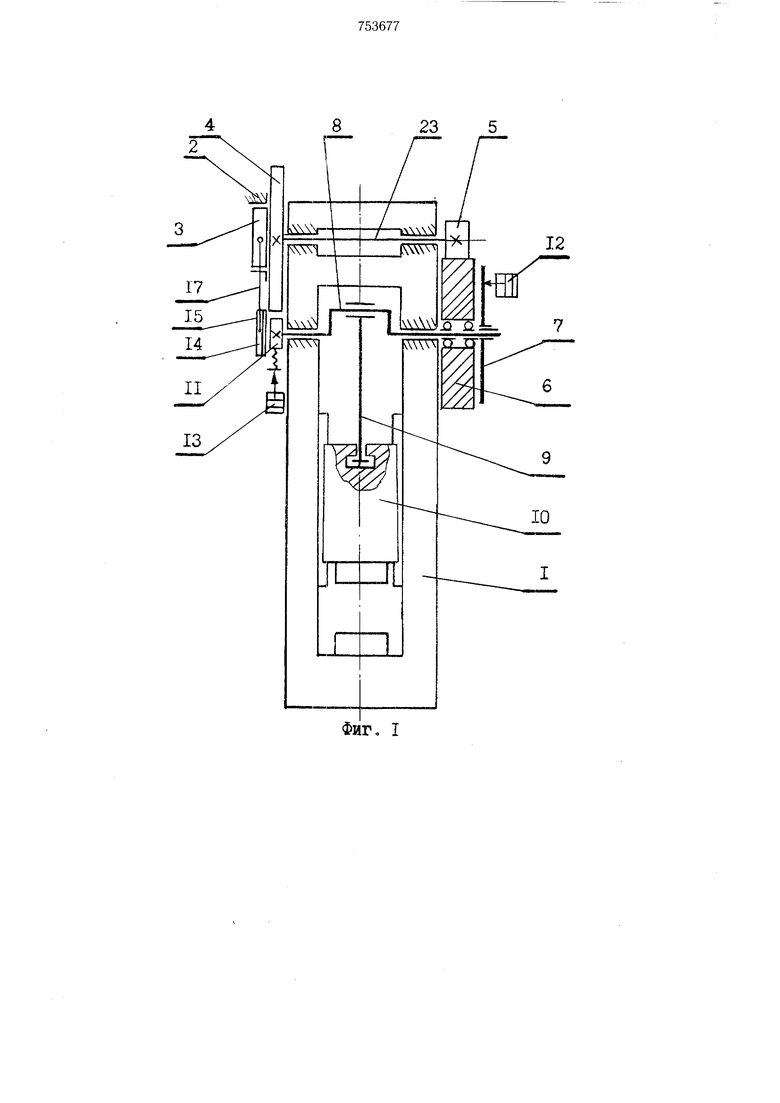
t - соотношение плеч рычагов. На фиг. 1 схематически показан общий вид размещения привода на прессе; на фиг. 2 - схема механизма перемещения (сегментов статора); на фиг. 3 - схема передаточного механизма от кулачков к сег2Q ментам статора; на фиг. 4 - графики изменения величин угловых скоростей маховика (со ) и перемещения сегментов статора в зависимости от угла поворота кривошипного вала ( а). Привод содержит установленные на станине 1 пресса в направляющих 2 плоские сегменты 3 статора электродвигателя, ротором которого является дополнительный маховик 4, соединенный шестерней 5 с основным маховиком 6, который муфтой 7 включения связан с кривошипным валом 8. Последний посредством шатуна 9 связан с ползуном 10 и снабжен тормозом 11. Муфта 7 включения и тормоз 11 управляются от пневмоцилиндров 12 и 13. На кривошипном валу 8 установлены кулачки 14 и 15, связанные через толкатели 16 и двуплечие рычаги 17 с плоскими сегментами статора. Рычаги 17 подпружинены пружинами 18 и связаны для обеспечения свободного перемещения относительно толкателей 16 и статоров 3 серьгами 19 и 20. Двуплечие рычаги 17 установлены с возможностью поворота в шарнирах 21. Для обеспечения регулирования длины ( копиров 16 они снабжены винтовым механизмом 22, а для изменения соотношения длин плеч -Ег. и -6з опоры: 2,1 рычагов 17 установлены с возможностью их перемещения в направляющих 22. Шестерня 5 соединена с маховиком 4 валом 23. Привод работает следующим образом. В исходном положении кривощипный вал 8 занимает крайнее верхнее положение, ползун 10, связанный с кривошипным валом шатуном 9, также занимает крайнее верхнее положение. Муфта 7 отключена, а тормоз 11 затор, можен. Кулачки 14 и 15, рычаги 17 и сегменты 3 дугостатора занимают положение, показанное на фиг. 2. Электродвигатель включен, при этом ротор-маховик вращается с угловой скоростью oJmcc опрсделяемой следующим соотнощением: о-Ятш(1-&н)-им, (1) гдеи),-начальная угловая скорость враш,ения ротора маховика 4; К|д;„-начальное расстояние сегментов 3 статора до центра вращения ротора-.маховика 4; 6н -номинальное скольжение элйстродвигателя;UM - скорость бегущего электромагнитного поля. Для включения муфты 7 и отключения тормоза 11 срабатывают пневмоцилиндры 12 и 13. Кривошипный вал 8 соединяется с основным маховиком 6 и через шестерню 5 и вал 23 с ротором-маховиком 4, приводится во вращательное движение. При этом часть кинематической энергии, накопленной подвижными частями (ротором-маховиком 4, валом 23, шестерней 5 и основным маховиком 6), идет на разгон кривошипного вала 8, шатуна 9 и ползуна 10, а также на потери в муфте 7. Скорость вращения ротора-маховика 4 на угле поворота кривошипного вала и 1 падает до значения Ц),, определяемого затратами кинетической энергии ДТ 3 W-.wf.. рде - ,- приведенный к маховику 4 момент инерции системы 4-23-5-6. Для того, чтобы электродвигатель работал в номинальном режиме, необходимо сохранить постоянным соотношение W()--R-О-.„).UM , (г) где Ш(с)-угловая скорость вращения маховика 4, зависящая от угла поворота кривопшпного вала; R - расстояние сегментов 3 статора до центра вращения ротора-маховика 4; 6. к номинальное скольжение электродвигателя. Для выполнения этого соотношения в связи с уменьшением угловой скорости и маховика 4 необходимо увеличивать расстояние R расположения сегментов дугостатора относительно оси вращения ротора-маховика. Это осуществляется соответствующим образом спрофилированными кулачками 14 и 15, воздействующими на копиры 16 и далее через серьги 19, рычаги 17 и серьги 20 на плоские сегменты 3 статора. При этом линейная скорость ротора-маховика 4 в месте расположения дугостаторов (R) остается постоянно равной и„ (1 - &„) Дальнейший участок холостого хода вниз происходит с увеличением угловой скорости 60 вращения ротора-маховика 4 и связанных с ним подвижных частей, при этом расстояние сегментов 3 статора 4 до центра вращения ротора-.маховика 4 уменьшается до начального RO, что приводит к восстановлению угловой скорости маховика 4 до WmAx При рабочем ходе кинетическая энергия подвижных частей пресса переходит в работу пластического деформирования заготовок. Поэтому при угле поворота «г, кривошипного вала 8, соответствующего рабочему ходу, угловая скорость ротора-.маховика 4 уменьшается отсОоДОШв,;, определяемой затратами кинетической энергии . Сегменты 3 статора во время рабочего хода перемещаются на расстояние AR Rmn-Кгип где R„.rpaccтoяниe статоров до центра вращения ротора-маховика 4 в конце рабочего хода. В известных приводах кривошипных прессов величина со mm ограничивается допустимым скольжением электродвигателя 6 . В рассматриваемом приводе величина ajnin может быть сколько угодно малой, в связи с чем маховик может отдавать во время рабочего хода большую часть своей кинетической энергии. При холостом ходе вверх сегменты 3 статора под действием кулачков 14 и 15 перемещаются от периферии ротора-маховика 4(Rm«) к его центру и занимают положение Rmin- угловая скорость его увеличивается от О) mm ДО ODmAX в крайнем верхнем положении ползуна муфта 7 отключается, тормоз 11 включается. На этом цикл работы пресса заканчивается. Формулу (2) можно записать следующим образом СО(с,)-(«тт-ьАНЬ(, где AR - перемещение сегментов 3 статора. Эту величину Можно выразить через перемещение толкателей (1 - Дг). ,,, где i отношение плеч рычагов 17. Величина Дг - ,- -Rmin является исходной для построения профиля кулачков 14 и 15. Эта конструкция привода позволяет регулировать число автоматических ходов ползуна, а также величину расхода энергии во время рабочего хода. С целью увеличения или уменьшения числа автоматических ходов ползуна соответственно необходимо увеличить или уменьшить длину , копира 16 с помощью винтового механизма 22. При этом соотвественно будут уменьшены или увеличиены значения крайних положений сегментов 3 статора, т.е. расстояния Rmin и Ктлщчто приведет к увеличению или уменьщению угловой скорости tOj маховика 4 и изменению числа .ходов ползуна пресса. С целью регулирования величины расхода энергии во время работы хода изменяется соотношение плеч -Еа и i двуплечего рычага 17. При увеличенных затратах энергии перепад угловых скоростей 0пш и W тт ротора .маховика 4 возрастает и, следовательно, должен возрасти интервал отклонений AR сегментов статора. Для этого отношение увеличивают. При уменьшенных затратах энергии требуется меньший перепад угловых скоростей COi и ьОшш,в связи с чем уменьшаются перемещения статоров AR и отношение Перемещения сег.ментов 3 статора вдоль радиуса вспомогательного маховика в зависимости от угла поворота cLкривошипного вала, следовательно и профили кулачков 14 и 15, могут быть рассчитаны для любого типового процесса штамповки на данном прессе и легко отрегулированы для другого процесса, например установкой кулачков с другим профилем. Такая конструкция привода подвижных частей кривошипного пресса обеспечивает его работу в номинальном режиме с широКИМ диапазоном регулирования затрачиваемой кинетической энергии. Экономический эффект от использования привода кривошипного пресса обеспечивается за счет регулирования скорости, следовательно работой с различными значениями эффективной энергии и более глубокого скольжения привода, что снижает вероятность заклинивания пресса и дает возможность уменьшить габариты маховика. Формула изобретения Привод кривошипного пресса, содержащий установленный на станине асинхронный электродвигатель со статором в виде сегментов и плоским дискообразным ротором, кинематически связанным с маховиком, соединенным муфтой с кривошипным валом пресса, отличающийся тем, что, с целью уменьшения габаритов привода, повышения надежности и производительности, он снабжен жестко закрепленными на кривошипном валу кулачками и установленными на станине двуплечими рычагами, одно плечо каждого из которых связано через толкатель соответственно с одним из упомянутых кулачков, второе шарнирно соединено с одним из сегментов статора, причем профиль кулачков ограничен поверхностью, определяемой следующей зависимостью. At ,-n.f, где Дг -ход толкателя, определяемый изменением радиуса кулачка; Uin - скорость бегущего поля в электродвигателе;н - номинальное скольжение электродвигателя;d. -угловая скорость вращения ротора электродвигателя; mii, -минимальное расстояние от сегментов статора до центра вращения ротора; I- -соотношение плеч рычагов. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 66540, кл, Н 02 К 17/30, 1944. 2.Навроцкий Т. А. Прессы-автоматы для олодной штамповки. М., Машгиз, 1956. 3.Джонс Ф. Д и Хортон X. Л. Механизы автоматического действия М., Машгиз, 1961. 4.Патент США № 3983738, л. В 21 J 9/18, 1976 (прототип). Фиг. 4
| название | год | авторы | номер документа |
|---|---|---|---|
| Винтовой пресс | 1982 |
|
SU1097507A1 |
| Кривошипный пресс | 1990 |
|
SU1776236A3 |
| Винтовой пресс с дугостаторным приводом | 1977 |
|
SU716870A1 |
| КРИВОШИПНЫЙ ПРЕСС | 1998 |
|
RU2164206C2 |
| Пресс | 1985 |
|
SU1355497A1 |
| Тормоз кривошипного пресса | 2021 |
|
RU2766616C1 |
| ВИНТОВОЙ ПРЕСС | 2014 |
|
RU2555733C1 |
| Винтовой пресс | 1988 |
|
SU1523394A1 |
| ВИНТОВОЙ ПРЕСС С МУФТОВЫМ ПРИВОДОМ | 1999 |
|
RU2169077C2 |
| Винтовой пресс | 1977 |
|
SU707827A1 |