(54) ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ШАГОВЫЙ ПРИВОД
1
Изобретение относится к области автоматического управления машинами и может быть применено, например, в системах программного управления станками, в системах управления летательными аппаратами, содержащих цифровые вычислительные машины и т. п.
Известен электрогидравлический шаговый привод, содержащий электронный коммутатор, управляющий шаговый электродвигатель, кинематически связанный с дросселирующим гидрораспределителем, выполненным в виде цилиндрического золотника, установленного в корпусе с образованием торцовых камер, исполнительный гидродвнгатель с рабочим органом, сливиые и напор-, ные гидролинии {1|.
Недостатком этого электрогидравлического шагового привода является наличие люфта в цепи механической обратной связи, который приводит к умеиьшению устойчивости работы и точности позиционирования привода. Кроме того, получение требуемого усилия на перестановку золотника дросселирующего гидрораспределителя достигается за счет увеличения передаточного отношения кинематической связи, установленной
между дросселирующим гидрораспределнг телем и управляющим шаговым электродвигателем, или за счет увеличения выходной мощности последнего, что, в свою очередь, приводит к уменьшению добротности приво, да по скорости при фиксированной частоте приемистости для данного типа шагового электродвигателя.
Цель изобретения - улучшение эксплуатационных характеристик привода.
Это достигается тем, что привод содер10 жнт два управляемых от электронного коммутатора электрогидравлических клапана, установленных в корпусе гидрораспределителя, каждый из которых связан с напорной и сливной гидролиииями-и одной из торцовых камер, причем корпус гидрораспредели15теля жестко связан с рабочим органом гидродвигателя.
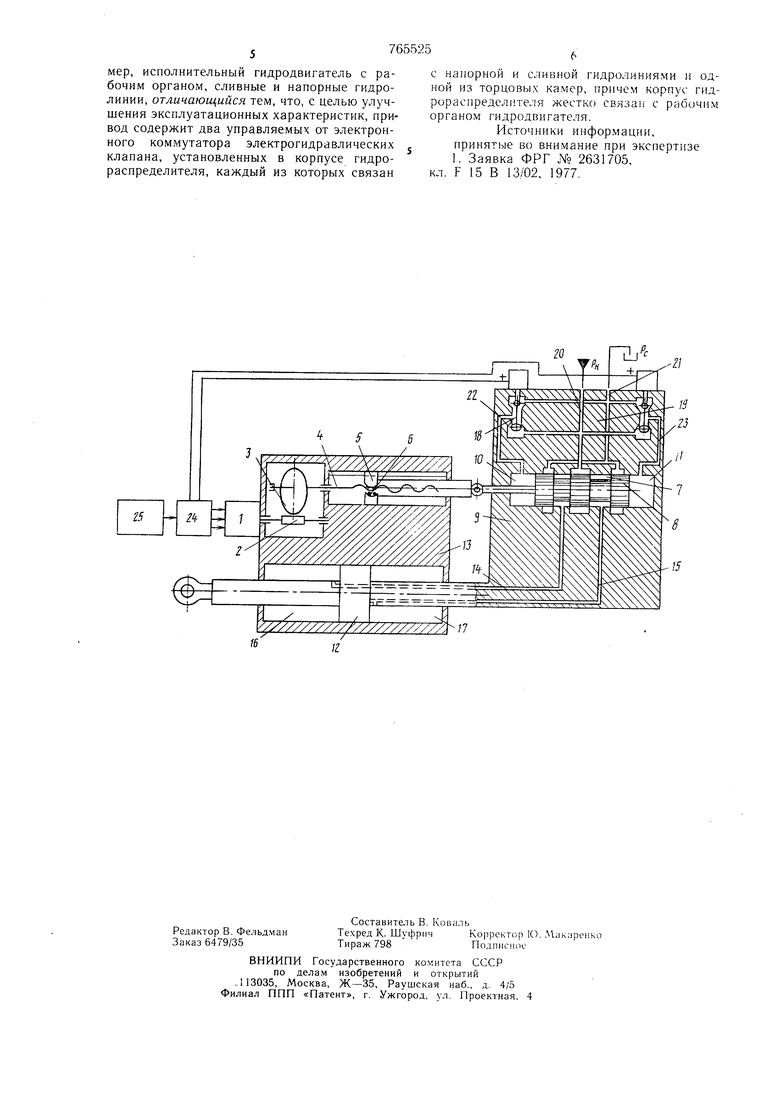
На чертеже представлена принципиальная схема предлагаемого привода.
Электрогндравлический шаговый приЗО.вод содержит управляющий шаговый электродвигатель 1, кинематический связанный червяк 2, червячное колесо 3, винт 4 н 5 с гайкой 6 с дросселирующим гндрораспределителем 7. Дросселирующий гидрораспределитель 7 выполнен в виде цилиндрического золотника 8, установленного в корпусе 9 с образованием торцовых камер 10 и 11, нричем корпус 9 жестко связан с рабочим органом 12 (например, норшень со штоком) иснолнительного гидродвигателя 13. В рабочем органе 12 выполнены гидролинии 14 и 15, соединяющие рабочие камеры 16 и 17 исполнительного гидродвигателя 13 с дросселирующим гидрораспределителем 7. В корпусе 9 установлены два электрогидравлических клапана 18 и 19, каждый из которых связан с напорной и сливной гидролиниями 20 и 21 соответственно,причем электрогидравлический клапан 18 гидролинией 22 связан с торцовой камерой 10, а электрогидравлический клапан 19 гидролинией 23 с торцовой камерой 11. Электрогидравлические клапаны 18 и 19 управляются от электронного коммутатора 24. На вход электронного ком.мутатора 24 поступает сигнал от цифровой управляющей машины 25. Червяк 2 и червячное колесо 3 в совокупности образуют са.мотормозящуюся червячную пару. Электрогидравлический шаговый привод работает следующим образом Управляющие импульсы с цифровой управляющей машины 25 поступают на электронпый коммутатор 24, который формирует алгорит.м управления на шаговый электродвигатель 1 и на один из электрогидравлических клапанов 18 или 19. Управляющий шаговый электродвигатель 1 и один из электрогидравлических клапанов 18 или 19 работают одновременно, но несинхронная работа этих двух устройств при подаче и снятии напряжения компенсируется самотор.мозящейся червячной парой, которая представляет управляющему шаговому электродвигателю 1 главную роль в отработке требуемой величинЕ) перемещения дросселирующему гидрораспределителю 7. При получении команды с электронного коммутатора 24 управляющий шаговый электродвигатель 1 поворачивает червяк 2 (вправо или влево в зависи.мости от поступивп1ей команды), который поворачивает червячное колесо 3. Червячное колесо 3 жестко связано с винтом 4, вызывает вращение последнего, что, в свою очередь, приводит к перемещению гайки 6, которая жестко связана с пор1пнем 5. Поршень 5 с гайкой 6 жестко связан с цилиндрическим золотником 8 дроссе.чирующего гидрораспределителя 7. Пере.мепдение цилиндрического золотника 8 относительно кор пуса 9 приводит к соединению рабочих камер 16 и 17 исполнительного гидродвигателя 13 через гидролинии 14 и 15 соответственно перемещению цилиндрического золотника 8 с напорной 20 и сливной 21 гидролиниями, что вызывает перепад давления на рабочем органе 12 и, следовательно, движение последнего и корпуса 9 дросселирующеГО гидрораспределителя 7. Гидролинии 14 и 15 соединяют рабочие камеры 16 и 17 с напорной 20 и сливной 21 гкдролиниями таким образом, что при перемещении рабочего органа 12 и жестко связанного с ним корпуса 9 происходит перекрытие гидролиний 14 и 15 цилиндрическим золотником 8. Следовательно, рабочий орган 12 гидродвигателя 13 отрабатывает такое же перемещение, на которое был передвинут цилиндричес кий золотник 8. Одновременно е поступлением сигнала с электронного коммутатора 24 на управляющий шаговый электродвигатель I синхронно сигнал заводится на электрогидравлический клапан 18 или 19. Работа электрогидравличееких клапанов 18 и 19 согласована с работой управляющего шагового электродвигателя 1 таки.м образом, что при перемещении цилиндрического золотника 8 дросселирующего гидрораспределителя 7 от управляющего шагового электродвигателя I, например влево, срабатывает электрогидравлнческий клапан 19, тем са.мым соедипяя торцовую ка.меру 11 с напорной гидролинией 20. Увеличение давления в торцовой камере II до давления питания вызывает перепад давления на цилиндрическом золотнике 8, что приводит к возникновению добавочного усилия на перестановку последнего. С прекрашение.м подачи сигнала на управляющий шаговый электродвигатель 1 также снимается сигнал, поступающий на один из электрогидравлических клапанов 18 и 19, однако перепад давлений на цилиндрическом золотнике 8 некоторый момент времени сохраняется и соответственно сохраняется усилие, стремящееся сдвинуть цилиндрический золотник 8 в прежнем направлении дальше. Самотормозяп аяся червячная пара не дает этой возможности, так как эта передача дает возможность только управляющему числовому электродвигателю 1 в отработке требуемой ве.личипы пере« ещения цилиндрического золотника 8. Технико-экономическая эффективность вышеописанного привода состоит в pacnjHpe1ШН области всзмож1 ого его при.менения, так как увеличивается надежность и быстродействие привода, увеличивается диапазон устойчивой работы п)ивода при инерционной нагрузке, и в увеличении качества процесса отработки приводом управляющих С1 гналов. Формула изобретения Электрогидравлический шаговый привод, содержащий электронный коммутатор, управляющий щаговый электродвигатель, кинематически связанный с дросселируюпдим гидрораспределителем, выполненным в виде цилиндрического золотника, установлен ного в корпусе с образованием торцовых камер, исполнительный гидродвигатель с рабочим органом, сливные и напорные гидролинии, отличающийся тем, что, с целью улучшения эксплуатационных характеристик, привод содержит два управляемых от электронного коммутатора электрогидравлических клапана, установленных в корпусе гидрораспределителя, каждый из которых связан
с напорной и сливной гидролиниями и одной из торцовых камер, причем корпус гидрораспределителя жестко связан с рабочим органом гидродвигателя.
Источники информации,
принятые во внимание при экспертизе
1. Заявка ФРГ № 2631705. кл. F 15 В 13/02, 1977.
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой электрогидравлический привод | 1978 |
|
SU746132A1 |
| Цифровой электрогидравлический привод | 1978 |
|
SU792002A1 |
| Устройство для управления машиной с режущим рабочим органом | 1976 |
|
SU652280A1 |
| Цифровой электрогидравлический привод | 1979 |
|
SU823665A1 |
| Гидравлический привод | 1981 |
|
SU1023152A1 |
| Устройство для автоматической защиты исполнительного органа горной машины от перегрузок | 1982 |
|
SU1044783A1 |
| Гидроусилитель момента | 1972 |
|
SU745378A3 |
| ШАГОВЫЙ ГИДРОПРИВОД С ОБЪЕМНЫМ ДОЗИРОВАНИЕМ | 2018 |
|
RU2680633C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ | 2004 |
|
RU2272181C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ СЛЕДЯЩИМ ПРИВОДОМ С МАШИННО-ДРОССЕЛЬНЫМ УПРАВЛЕНИЕМ | 2023 |
|
RU2815567C1 |
