54) ЭЛЕВАТОРНЫЙ СТЕЛЛАЖ
1
Изобретение относится к узлам и деталям машин, в частности узлам элеваторных стеллажей.
Известны элеваторные стеллажи с подвесками, снабженные роликами, входящими в пазы рамы и служащими для предохранения подвесок от раскачивания вокруг осей, на которых они подвешиваются, при прохождении ими криволинейных участков пути при огибании звездочек 1 .
Наиболее близким к изобретению является элеваторный стеллаж, содержащий раму, грузонесущие цепи, огибающие звездочки, закрепленные на грузонесущих цепях кронштейны для крепления подвесок, направляющие размещенные на участках прямолинейного движения подвесок, и механизм фиксации подвесок от раскачивания
Однако нередко происходит за- . клинивание подвесок при прохождении ими участков пути при огибании звездочек, особенно в момент пуска и останова.
Цель изобретения - повысить надежность фиксации подвесок.
Это достигается тем, что механизм фиксации подвесок выполнен в виде шарнирного параллелограмма.
одна из неподвижных осей которого связана с осью одной из звездочек, а другая ось - с рамой, причем в вершинах шарнирного параллелограмма установлены подпружиненные, фиксаторы, с помощью полумуфты связанные с осью подвески на участке огибания звездочек .
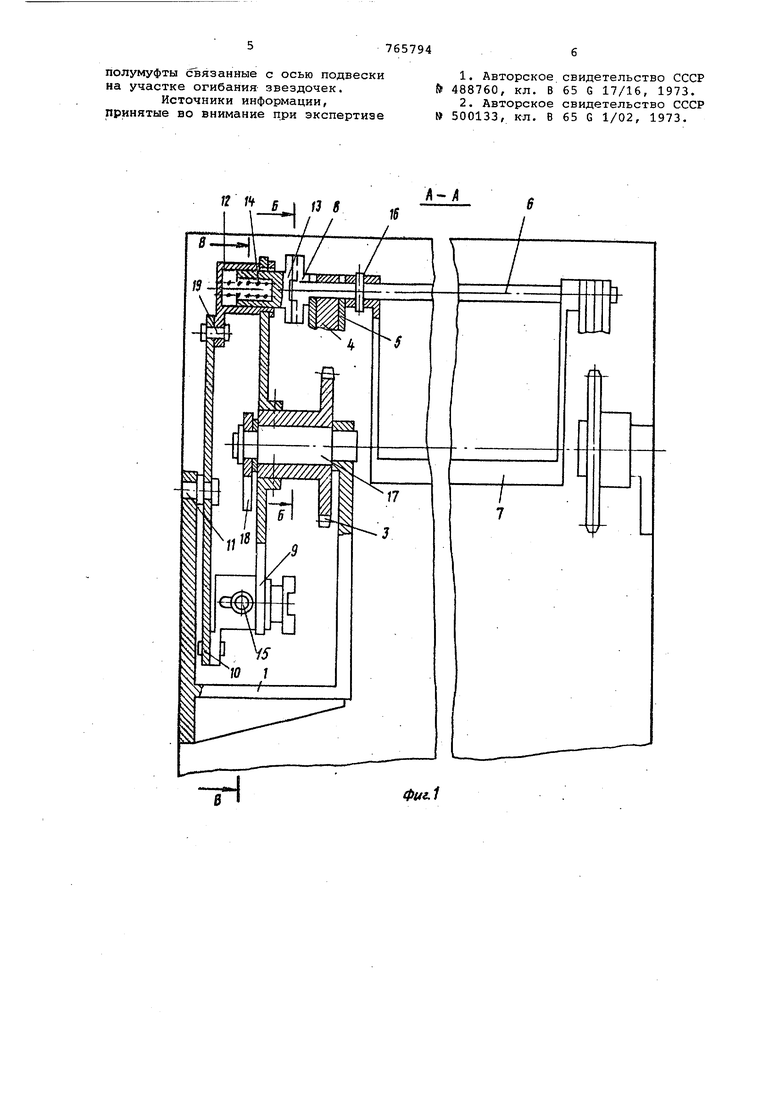
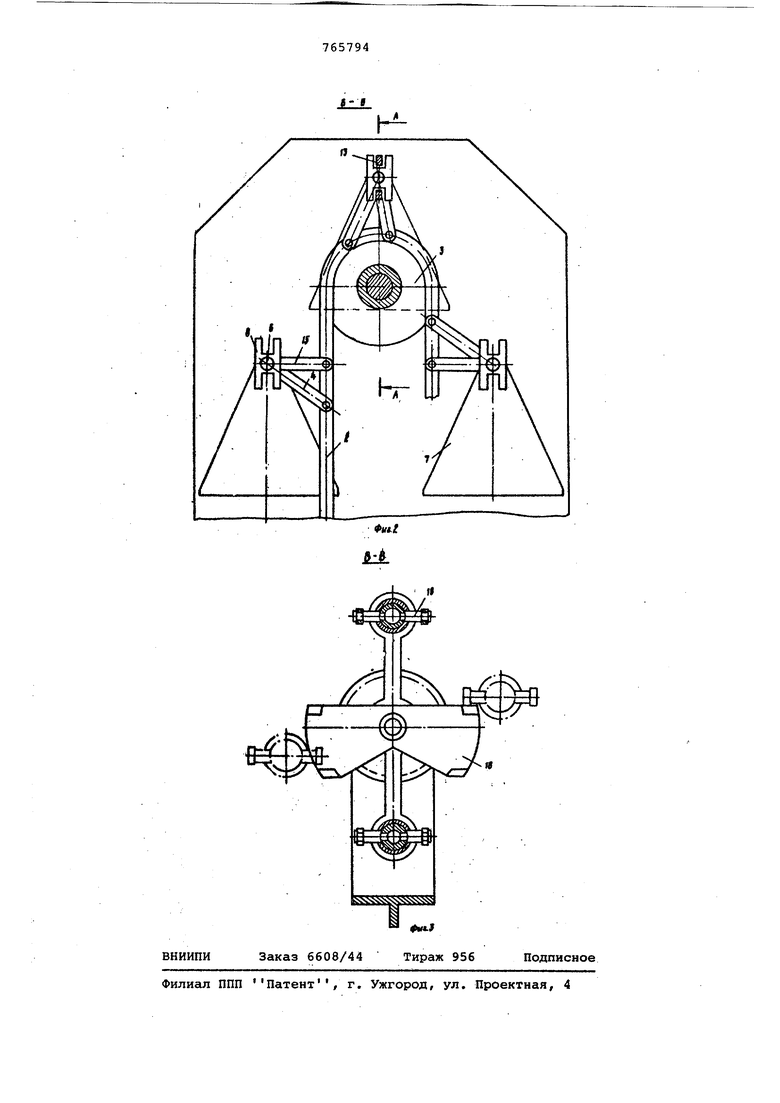
На фиг. 1 изображен разрез А-А на фиг. 2; на фиг. 2 - разрез Б-Б на фиг. 1; на фиг. 3 - разрез В-В на фиг. 1.
Элеваторный стеллаж содержит psiMy 1, грузонесущие цепи 2, огибающие звездочки 3, кронштейны 4 и 5, закрепленные на грузонесущих цепях, в которых свободно поворачивается ось 6 с неподвижно соединенной с ней подвеской 7 и полумуфтой 8.
Механизм фиксации подвесок от раскачивания выполнен в виде шарнирного параллелограмма и состоит из водила 9, неподвижно закрепленного на звездочке 3, рычага 10, вращающегося на оси 11, неподвижно закрепленной в раме 1, корпусов 12, шарнирно соединенных с водилом 9 и рычагом 10. В корпусах 12, которые размещены в вершинах параллелогра ма, расположены фиксаторы 13 с пружинами 14-. В фиксаторб 13 с двух сторон неподвижно .закреплены пальцы 15, прохо дящие через пазы в корпусе 12. Фиксатор 13 имеет возможность перемещаться в корпусе 12 в осевом направлении, при этом пальцы 15 скользят вдоль пазов в корпусе 12, предохраня ф1г:сатор 13 от проворота относительно корпуса 12,На левую часть оси бнапрессована полумуфта 8, входящая в зацепление с фиксатором 13 на Участке их совместного движения, по окружности. Подвеска 7 неподвижно г закреплена на оси б при помощи конических штифтов 16. На оси 17 неподвижно закреплен упор 18. Расстояние между осью 17 звездочки 3 и осями фи саторов 13 равно радиусу траектории оси 17 при ее движении на участке по окружности. Расстояние между осевыми линиями осей 19 и 11 равно расстоянию между осью звездочки 3 и осями фиксаторов 13. Число зубьев звездочки 3 задано с таким расчетом, что за один их оборот цепи 2 перемещаются на расстояни равное двум шагам между подвесками 7 Таким образом, в работе участвует каждый из двух фиксаторов 13, смещен ных относительно друг друга на . Работа механизма для фиксации подвесок в элеваторном- стеллаже происходит следующим образом. При движении цепей с подвесками 7 звездочка 3 вращается вместе с жестко закреплен ньам на ней водилом 9. Водило 9, воздействуя на корпуса 12, приводит их в движение. При этом водило проворачивается относительно корпусов в местах их соединения. В свою очередь,корпуса 12 находятся в кинематической связи с рычагом 10 и при своем движении воздействуют на него. Рычаг 10 начинает вращение вокруг оси 11 и одновременно провора чивается относительно корпусов 12 в местах их соединений. При этом корпу са 12, двигаясь по окружности, всегда остаются параллельными сами себе, Ъ. так как расположенные в них фикса горы 13 не могут проворачиваться относительно них, то эти фиксаторы при движении тоже остаются параллельными самим себе. При этом траектории движения фиксаторов 13 и оси 6 при их совместном движении по окружности при огибании звездочки 3 совпадают. Процесс фиксации происходит следующим образом.. При движении подвесок 7 вверх и вниз они фиксируются от раскачивания вертикальными направляющими (на чертеже не показаны), и сам процесс фиксации не вызывает затруднений. В момент выхода подвески 7 из йертикальных направляющих и начала движения ее и связанной через ось б с ней полумуфты 8 по окружности фиксатор 13 под действием пружины 14 входит своим выступом в паз полумуфты 8 и не дает возможности ей и связанной с ней подвеске 7 поворачиваться относительно горизонтальной оси подвески 7 на всем пути их совместного движения до момента выхода фикса-тора 13 из полумуфты 8. Перед входом фиксатора 13 в паз полумуфты 8 один из пальцев 15 находит на упор 18 и отжимает фиксатор ,в левую сторону. При этом палец скользит по упору. При выходе пальца 15 с упора фиксатор 13 под действием пружины 14 входит в паз полумуфты 8. Перед выходом фиксатора 13 из зацепления с полумуфтой 8 он отжимается в крайнее левое положение пальцем 15, расположенным с другой стороны фиксатора 13, в момент, когда этот палец находит на противоположный конец упора 18. До этогомомента подвеска 7 входит в вертикальные направляющие и продолжает двигаться вниз. Фиксатор 13, двигаясь по окружности, находится в это время в отжатом в левую сторону положении. При выходе пальца 15 с упора 18 фиксатор 13 под воз- действием пружины 14 занимает крайнее правое положение и продолжает двигаться по окружности в таком положении до тех пор, пока цикл не повторится. Конструкция механизма для фиксации подвесок в элеваторном стеллаже допускает несовпадение траектории движения осей фиксатора 13 и полумуфты 8 в необходимых пределах благодаря гарантированным зазорам между выступом фиксатора 13 и пазом полумуфты 8, в который фиксатор 13 входит. Раскачивание подвесок в этих пределах допустимо.. Механизм обеспечивает надежную фиксацию подвесок механизированного элеваторного стеллажа от раскачивания, полностью исключаются случаи заклинивания подвесок при прохождении ими участков пути при огибании звездочек. Формула изобретения Элеваторный стеллаж, содержащий раму, грузонес5Тзше цепи, огибающие звездочки, закрепленные на грузонесущих цепях крошатейны для крепления подвесок, направляющие, размещенные на участках прямолинейного движения подвесок и механизм фиксации подвесок от раскачивания, отличающ и й.с я тем, что, с целью повышения надежности фиксации подвесок, механизм фиксации подвесок выполнен в виде шарнирного параллелограмма, одна из неподвижных осей которого связана с осью одной из звездочек , а другая ось - с рамой, причем в вершинах шарнирного параллелограмма установлены подпружиненные фиксаторы с помощью,
полумуфты связанные с осью подвески на участке огибания звездочек.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР ft 488760, кл. В 65 G 17/16, 1973.
2.Авторское свидетельство СССР 500133, кл. В 65 G 1/02, 1973.
| название | год | авторы | номер документа |
|---|---|---|---|
| Полочный элеваторный стеллаж | 1973 |
|
SU500133A1 |
| Полочный элеваторный стеллаж | 1979 |
|
SU831668A2 |
| ЭЛЕВАТОРНЫЙ СТЕЛЛАЖ | 1991 |
|
RU2016829C1 |
| Устройство для крепления полки элеваторного стеллажа к грузонесущей цепи | 1982 |
|
SU1024395A1 |
| Элеваторный стеллаж | 1985 |
|
SU1306854A1 |
| Полочный элеваторный стеллаж | 1986 |
|
SU1472377A1 |
| Полочный элеваторный стеллаж | 1980 |
|
SU929507A2 |
| Устройство для крепления полки элеваторного стеллажа к грузонесущей цепи | 1979 |
|
SU856906A1 |
| Элеваторный стеллаж | 1985 |
|
SU1326505A1 |
| Устройство для накопления грузов | 1990 |
|
SU1789444A1 |
13 8 1/ / Л А Фиг,1
