Изобретение относится к складскому оборудованию, преимущественно к элеваторным стеллажам с вертикальным расположением ветвей и хранением грузов на подвесках.
Цель изобретения - повышение удобства эксплуатации.
На фиг. 1 - общий вид в разрезе элеваторного стеллажа; на фиг.2 - вид А на фиг.1; на фиг.З - узел I на фиг.1; на фиг.4 - вид Б на фиг.З; на фиг.5 - вид В на фиг.4; на фиг.6 - вид Г на фиг.З; на фиг.7 -горизонтальная балка; на фиг.8 - разрез Д-Д на фиг.7; на фиг.9 - разрез Е-Е на фиг.6; на фиг. 10 - схема взаимодействия роликов с вертикальными пазами копиров; на фиг. 11 - разрез Ж-Ж на фиг.6; на фиг.12 - вид И на фиг.З.
Элеваторный стеллаж содержит щахтную металлоконструкцию 1 с ведомыми звездочками 2 (фиг.1) и ведущими звездочками 3, установленными в корпусах 4, расположенных в направляющих 5 металлоконструкции 1 (фиг.2). Звездочки 2 и 3 охвачены грузовыми цепями 6, на которых шарнирно с помощью рычагов 7 подвещены подвески 8 с установленными в них съемными полками 9 с щунтами 10 (фиг.3,4,5). Привод перемещения 11 подвесок 8 выходными валами 12 связан посредством цепной передачи 13 с ведущими звездочками 3. Натяжка грузовых цепей 6 производится винтами 14. Натяжка цепной передачи 13 производится роликами 15 (фиг.1).
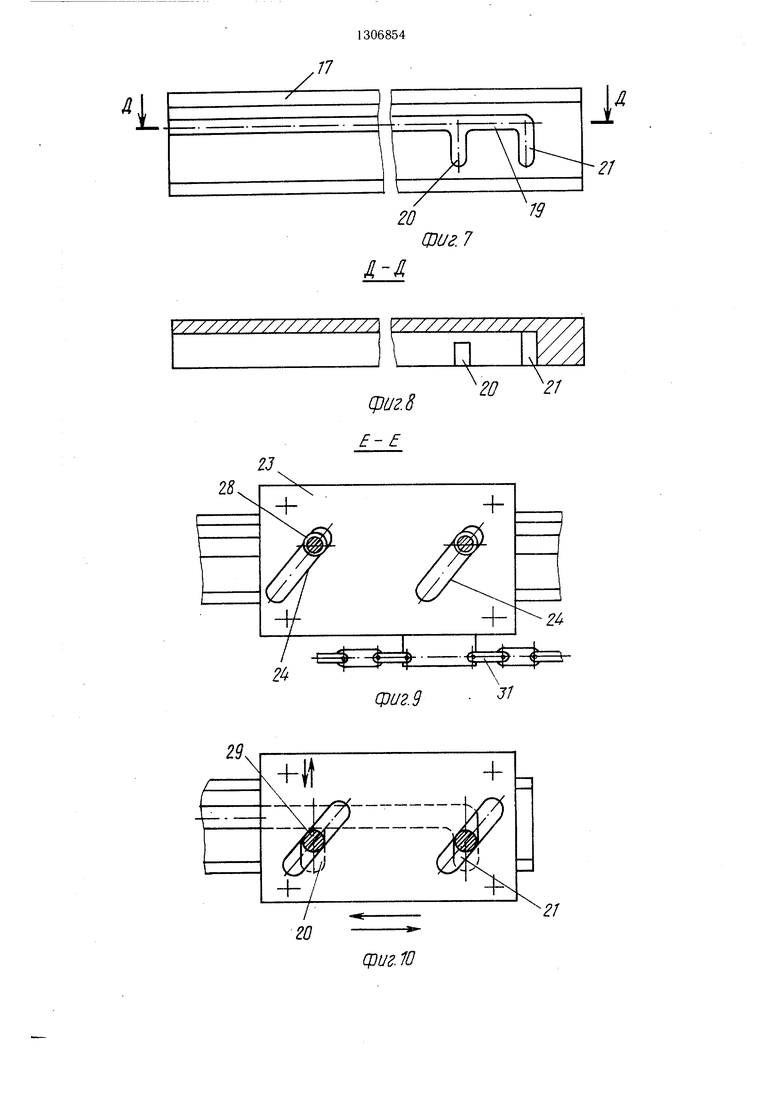
К подвижным корпусам 4 прикреплены кронщтейны 16 (фиг.2) механизма перемещения полок 9, в которых жестко установлены горизонтальные балки 17, снабженные копирами 18 (фиг.6). Копиры 18 выполнены из горизонтального паза 19 и двух вертикальных пазов 20 и 21 (фиг.7), причем вертикальный паз 20 по длине меньше паза 21 (фиг.8).
На горизонтальных балках 17 установлена тележка 22 (фиг.З), включающая каретки 23 со сквозными наклонными пазами 24 и роликами 25 (фиг.6,9), базирующиеся на наружных поверхностях горизонтальных балок 17. В тележку 22 входит подъемная платформа 26 с осями 27, на которых установлены ролики 28-30 (фиг. 10, 11). Ролики 28 взаимодействуют с наклонными пазами 24 кареток 23, а ролики 29 и 30 - с копирами 18 горизонтальных балок 17, причем ролики 29 входят в паз 20, а ролики 30 - в паз 21 (фиг.6, 10).
Каретки 23 соединены с цепной передачей 31 (фиг.9), при этом ее ведущие звездочки 32 закреплены на валах с опорами 33, а валы связаны между собой карданным валом 34 (фиг.2). Опоры 33 установлены на горизонтальных балках 17. Ведомые звездочки 35 цепной передачи 31, закрепленные на одной оси с канатоведущими барабанами 36, установлены в кронщтейнах 37, закрепленных на горизонтальных балках 17 (фиг.6). Канатоведущие барабаны 36 посредством канатов 38 через отводные блоки 39 связаны со шторой 40, снабженной талрепом 41 (фиг.З, 12).
Штора 40 закрывает приемное окно 42, выполненное в металлоконструкции 1
(фиг.З). Карданный вал 34 механизма перемещения полок 9 посредством цепной передачи 43 связан с приводом 44, установленным на регулируемом по высоте кронштейне 45 (фиг.1, 2).
На балках 17 закреплены стойки 46, на которых установлено устройство для контроля габаритов 47 в виде подвижной П-образ- ной рамки и кодовой датчик 48 (фиг. 12). Элеваторный стеллаж работает следующим образом.
В исходном положении тележка 22 находится в зоне съема полки 9 (фиг.1, зона а). Платформа 26 опущена, ролики 29 находятся в пазу 20, а ролики 30 - в пазу 21 копиров 18, которыми снабжены горизон- тальные балки 17 (фиг. 10), закрепленные на кронштейнах 16. Штора 40 опущена и закрывает приемное окно 42 металлоконструкции 1.
На пульте управления (не показан) набирается нужный номер полки 9, включает5 ся привод 1 1. Вращение выходных валов 12 через цепную передачу 13, натягиваемую роликом 15, передается на ведущие звездочки 3 (фиг.2), установленные в корпусах 4, размещенных в направляющих 5. Ведущие звездочки 3 передают движение
0 на грузовые цепи 6 и ведомые звездочки 2. Натяжка цепей 6 производится винтами 4. Подвески 8, закрепленные на рычагах 7, с полками 9 начинают перемещаться в вертикальном направлении. Кодовый датчик 48, закрепленный на стойках 46, взаимодейст5 вует с шунтами 10 и при подходе нужной полки 9 срабатывает, давая команду на выключение привода 11 (фиг.З).
После остановки привода 11 включается привод 44, установленный на регулируемом
Q кронштейне 45 и через цепную передачу 43 передает вращение на карданный вал 34, ведущие звездочки 32 в опорах 33 (фиг.2). Натяжение цепи цепной передачи 43 производится регулируемым по высоте кронштейном 45. Применение карданного вала 34
5 обусловлено тем, что ветви грузовой цепи 6 в процессе эксплуатации растягиваются неодинаково; если применить жесткий вал, то это может привести к заклиниванию и выходу из строя подшипников вала. Ведущие звездочки 32 перемещают цепь цепной пере0 дачи 31 и установленные на кронштейнах 37 ведомые звездочки 35, закрепленные на одних осях с канатоведущими барабанами 36 (фиг.6), которые, вращаясь, наматывают канаты 38, огибающие отводные блоки 39, поднимая штору 40 (фиг.З). Одновременно
каретки 23, связанные с цепной передачей 31, начинают перемещаться по наружным поверхностям горизонтальных балок 17 роликами 25 (фиг.9). Наклонные пазы 24 кареток 23 взаимодействуют с роликами 28, которые передают усилие на оси 27, а те - на ролики 29 и 30, которые, взаимодействуя с вертикальными пазами 20 и 21, направляют движение осей 27 и платформу 26 в вертикальном направлении (фиг.9,10,11). Движение вверх будет продолжаться до тех пор, пока ролики 29 и 30 не выйдут на горизонтальную часть копира 18, на паз 19 (фиг.7). В период подъема платформа 26
Формула изобретения
1. Элеваторный стеллаж, содержащий шахтную металлоконструкцию с окном выдачи, размещенные в ней вертикально замкну- 5 тые цепные органы, огибающие приводные и натяжные звездочки, шарнирно прикрепленные к цепям грузонесущие полки со съемными поддонами, подъемно-опускную штору для перекрытия окна выдачи, горизонтальприподнимает полку 9 с подвеской 8, а ю ные опорные балки, размещенные паралзатем тележка 22 с полкой 9 перемещается по балке 17 в зону загрузки - выгрузки (фиг.1, зона б). Конечное положение тележки 22 в этой зоне контролируется конечным выключателем (не показан), который
лельно и одними концами внутри металлоконструкции, а другими - снаружи ее в зоне окна выдачи, установленную с возможностью съема поддонов с полок на горизонтальных опорных балках перегрузочдает команду на включение привода 44. При 5 ную тележку с грузонесущей платформой
этом, вращение канатоведущих барабанов 36 и подъем щторы 40 прекращается.
Для установки полки 9 на подвеску 8 с
и приводом ее горизонтального перемещения в виде гибкого замкнутого органа, связанного трособлочной системой со щто- рой, и датчик останова привода цепей, пульта управления включается привод 44, , отличающийся тем, что, с целью повыще- но с другим направлением движения вра- ния удбства эксплуатации, каждая гори- щения. При этом цепная передача 31 движется в другом направлении, канатоведу- щие барабаны 36 вращаются также в другом направлении, щтора 40 начинает опускаться. Наклонные пазы 24 кареток 23, взаи- 25 вниз вертикальные участки,один из которых модействуя с роликами 28, заставляют пере- имеет меньщую глубину, в раме каретки мещаться тележку 22 с полкой 9 в обратном выполнены наклонные пазы, а грузонесущая направлении.платформа связана с рамой тележки с возЕсли габарит груза превыщает установ- можностью вертикального перемещения и ленный, то груз заденет и отклонит от снабжена смонтированными с каждой ее бо- вертикального положения П-образную рамку 30 ковой стороны параллельно и консольно осязонтальная опорная балка выполнена с копирным пазом, имеющим продольный участок и на первом конце горизонтальной балки сопряженные с ним и направленные
ми с расположенными на них роликами, размещенными один в копирном пазу опорной балки, а другой - в наклонном пазу рамы каретки, при этом первый ролик одной из осей с каждой боковой стороны рамы
устройства контроля габаритов 47 (фиг. 12). Ее положение контролируется конечным выключателем (не показан), который дает команду на выключение привода 44.
Ролики 29 и 30 двигаются по горизонтальному пазу 19 копиров 18, пока не 35 каретки выполнен меньшей щирины для подойдут к вертикальным пазам 20 и 21взаимодействия с направленным вниз участи начнут передвигаться по ним. После этого платформа 26 начинает опускаться, полка 9 ляжет на подвеску 8, а каретка 23, взаимодействуя с конечным выключателем (не по- .,, казан), дает команду на включение привода 44.
Талреп 41 служит для регулировки положения щторы 40 по высоте. При растяжении грузовых цепей 6 горизонтальные балком копирного паза меньшей глубины.
2.Стеллаж по п. 1, отличающийся тем, что датчик останова привода цепей размещен над окном выдачи и связан с горизонтальными опорными балками, а на поддонах закреплены воздействующие на него элементы.
3.Стеллаж по п. 1, отличающийся тем, что он снабжен П-образной рамкой для контки 17 будут опускаться вместе с канато- 45 роля габарита груза, смонтированной на го- ведущими барабанами 36, а щтора 40 начнетризонтальных опорных балках внутри металподыматься.
Формула изобретения
1. Элеваторный стеллаж, содержащий шахтную металлоконструкцию с окном выдачи, размещенные в ней вертикально замкну- тые цепные органы, огибающие приводные и натяжные звездочки, шарнирно прикрепленные к цепям грузонесущие полки со съемными поддонами, подъемно-опускную штору для перекрытия окна выдачи, горизонтальные опорные балки, размещенные параллельно и одними концами внутри металлоконструкции, а другими - снаружи ее в зоне окна выдачи, установленную с возможностью съема поддонов с полок на горизонтальных опорных балках перегрузоч ную тележку с грузонесущей платформой
и приводом ее горизонтального перемещения в виде гибкого замкнутого органа, связанного трособлочной системой со щто- рой, и датчик останова привода цепей, отличающийся тем, что, с целью повыще- ния удбства эксплуатации, каждая гори- вниз вертикальные участки,один из которых имеет меньщую глубину, в раме каретки выполнены наклонные пазы, а грузонесущая платформа связана с рамой тележки с воззонтальная опорная балка выполнена с копирным пазом, имеющим продольный участок и на первом конце горизонтальной балки сопряженные с ним и направленные
ми с расположенными на них роликами, размещенными один в копирном пазу опорной балки, а другой - в наклонном пазу рамы каретки, при этом первый ролик одной из осей с каждой боковой стороны рамы
каретки выполнен меньшей щирины для взаимодействия с направленным вниз участком копирного паза меньшей глубины.
2.Стеллаж по п. 1, отличающийся тем, что датчик останова привода цепей размещен над окном выдачи и связан с горизонтальными опорными балками, а на поддонах закреплены воздействующие на него элементы.
3.Стеллаж по п. 1, отличающийся тем, что он снабжен П-образной рамкой для контроля габарита груза, смонтированной на го- ризонтальных опорных балках внутри металлоконструкции.
1Z
7t tfus.Z





Изобретение относится к складскому оборудованию. Цель изобретения - повышение надежности. Элеваторный стеллаж содержит металлоконструкцию 1, приводные цепи 6, к которым прикреплены полки с поддонами, горизонтальные опорные балки 17, на которых установлена перегрузочная тележка 22 с установленной на ней с возможностью вертикального перемещения грузонесущей платформой 26. В горизонтальных опорных балках 17 выполнены ко- пирные пазы с продольными и вертикально расположенными участками разной глубины. В раме тележки выполнены наклонные пазы, а на грузонесущей платформе 26 с боковых сторон закреплены консольно оси с парами роликов на каждой для взаимо- дествия с копирными пазами балок 17 и наклонными пазами рамы тележки. Привод тележки в виде цепного замкнутого органа связан трособлочной системой со шторой 40 окна 42 выдачи. При включении привода тележки 22, расположенной внутри металлоконструкции 1, платформа 26 снимает поддон с полки и перемещает к окну выдачи, при этом щтора 40 поднимается. 2 з.п.ф-лы, 12 ил. i со о О5 00 О1 JJ
39
бидб
ю
Ц)игЛ
дидв
Г
фиг.
в ид г
25
23
J6
гб 23
rs
77 -J7
2
CPU г. В
35
36
Л
/
л
Л
фиг. 7
фиг. 9
21
CPUS. 10
ж-ж
21
28
фиг. 11
ВидИ
фиг. 12.
| Неуправляемая авиационная ракета | 2023 |
|
RU2829780C1 |
| Способ добывания бензина и иных продуктов из нефти, нефтяных остатков и пр. | 0 |
|
SU211A1 |
