1
Изобретение относится к области автоматизированного, дистанционного управления горнопроходчёскшда машинами со стреловидным рабочим органом.
Известна система программного уп- 5 равления стреловидным исполнит.ельным органом комбайна, включающая насосную станцию, гидроцилиндры горизонтального и вертикального перемещения рабочего органа, золотники, гидродомкра- Ю ты-датчики горизонтального и вертикального перемещения рабочего органа, гидродомкрат-приемник, программные элементы, гидромагистрали и другие гидравлические элементы 13 . 15
Такая система несмотря на слож- . ность конструкции не обеспечивает управление рабочим органом в зависимости от сопротивления угля разрушению. Это приводит к повышенному из- 20 носу режущего инструмента и перегрузкам привода.
Известна также гидравлическая система программного управления стрелок видным рабочим органом горной машины,25 содержащая насосную станцию, гидродомкраты горизонтального и вертикального перемещения рабочего органа, золотниковые гидрораспределители, обратные клапаны, гидродомкраты-датчикй гори- 30
зонтальногр и вертикального перемещения рабочего органа, гидродомкрат-приемник, программные элементы, напорные и сливную гидромагистрали 2.
Известная система также не обеспечивает управление рабочим органом в зависимости от -сопротивления угля разрушению, что снижает производительность горной машины.
Целью изобретения является повышение производительности горной машины за счет обеспечения дискретного автоматического изменения скорости обработки забсэя на каждом такте заходки в зависимости от сопротивления угля разрушении.
Указанная цель достигается, тем, что гидравлическая система снабжена датчиками тока, блоками управления и электрогидрозолотниками, включенными в напорные гидромагистрали гидродомкратов горизонтального и вертркального перемещения рабочего органа и подсоединенными цепями управления через соответствующие блоки управления к датчикам тока.
На чертеже приведена схема предлагаемой скстегш.
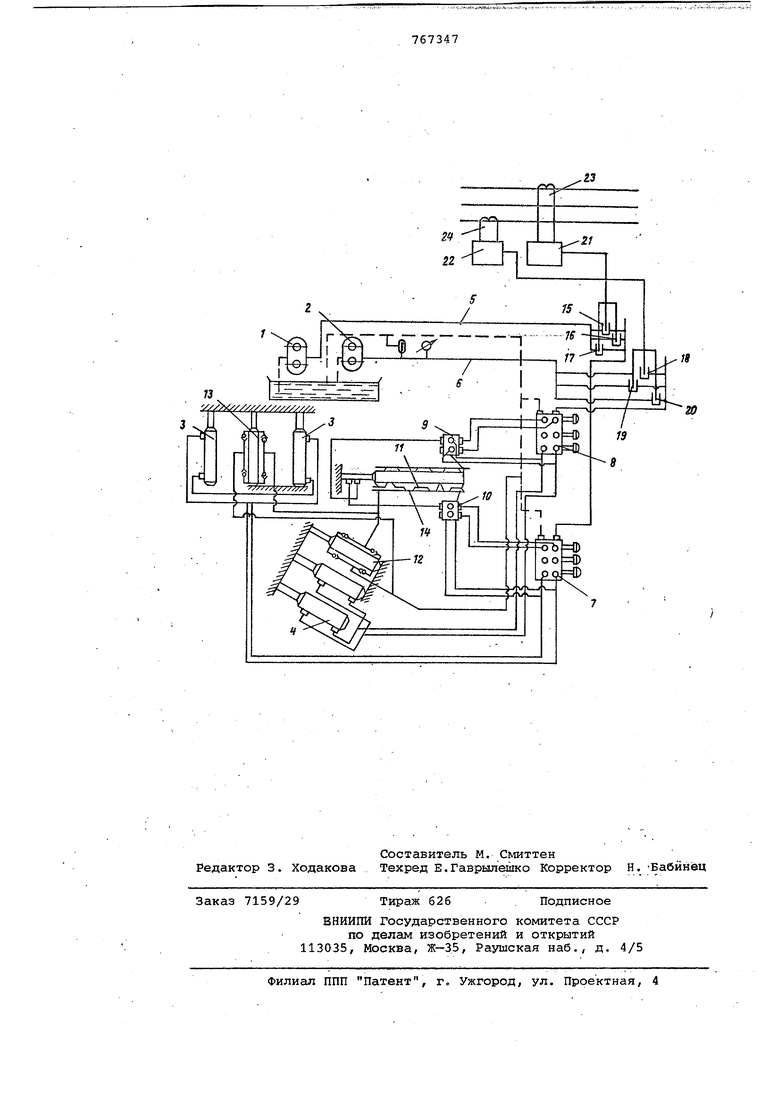
Гидравлическая система включает насосную станцию, содержащую йасос
1 и насос 2 соответственно гидродом.кратов вертикального 3 и горизонтального 4 перемещения рабочего органа, соединенную через напорные магистрали 5 и,6, золотниковые гидроперекдючатели 7 и 8 с зЬлбтнНКбвыЙй гйдрбраспределителями 9, Ю. Гидрораспределители 9 и ГО одним выходом соединены с поршневой полостью гидродомкрата-приемника 11, а другим выходом - соответственно с гидродомкратами 3 и 4 вертикального и горизонтального перемещения рабочего органа. Гидродомкраты-датчики 12 и 13 соединены с гидродомкратом-приемником 11, а другим каналом- со сливом. На корпусе гидродомкрата-приёмнйка 11 жестко закреплены программнсае элементы 14. В напорную магистраль 5 включены электрогидрозолотники 15, 16 и 17 с дроссельными от-верстиями, а в магистраль б - электрогидрозолотники 18, 19, 20 соединенные цепями управления через блоки управления 21 и 22 с датчиками тока 23 и 24.
Гидравлическая система программного управления работает следую1цим образом.
При перемещениирабочего органа в горизонтальном направлении ..-после включения электродвигателей комбайна в работу включаются гидронасос 2 и гидропереключатель 8. Гидрораспределитель 9 горизонтального перемещения рабочего органа включается программными элементами 14 гидродомкратаприемника 11. В результате сокращения гидродомкратов 4 горизонтального перемещения сокращается гидродомкратдатчик 12, Из него рабочая жидкость вьат есняется и подается в штоковоую полость гидродомкрата-приемника 11 С программными элементами 14 . Гидродомкрат-приемник раздвигается и программные; элементы 14 выключают гидрораспределитель 9 и включают гидрораспределитель 10 на подъем рабочего .органа . .
При перемещении рабочего органа в
вертикальном направлении включаются насос 1, гидропереключатель 7, гидрораспределитель 10, гидродомкрат-датчйк 13 с гидродомкратами вертикальШРо пёрёмёщёнйя 3. Рабоч:ая жидкость из штокоёой полости гидродомкратадатчика 13 подается в штоковую полость гидродомкрата-приемника 11, который, раздвигаясь, включаетзолот-. ник гидрораспределителя 9,
Датчики тока 23 и 24 включены в силовую линию рабочего органа и при 5 завышенной или заниженной его загруженности, подают сигналы на блоки управления 21 и 22. Приэтом электрогидрозолотники 15, 16, 17, а также 18, 19 и 20, .включенные соответст0 венноГ в гидромагистрали 5 и 6 горизонтального и вертикального перемещения рабочего органа, включаясь или отключаясь в зависимости от сигналов датчиков тока 23 и 24, регулируют расход гидравлической жидкорти. Благодаря этому изменяется скорость обработки забоя.
Данная система программного управ. ления обеспечивает автоматическое 0 изменение скорости обработки забоя на каждом также заходки в зависимости от сопротивления угля разрушению.
Формула изобретения
Гидравлическая система программного управления стреловидным рабочим органом горной Машины, содержащая насосную станцию, гидродомкраты горизонтального и. вертикального перемещенйя рабочего органа, золотниковые гидрораспределители, обратные клапаны, гидродомкраты-датчики горизонтального и вертикального перемещения рабочего органа, гидродомкрат-приемник,
программные элементы, напорные и сливную гидромагистралиг, отличающ а я с я тем, что, с целью повышения производительности горной машины, она снабжена датчиками тока, блоками
управления и электрогидрозолотниками, включенными в напорные гидромагистрали гидродомкратов горизонтального и вертикального перемещения рабочего органа .и подсоединенными цепями управления через соответствуюЙ1Йе блоки
управления к датчикам тока.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 205768, кл. Е 21 С 33/00, 1966.
2. Авторское свидетельство СССР № 540033, кл. Е 21 С 35/24, 1974.
rXi
iJBZS
r.v -I г-Ы- -J-Jг
21
Л.
22
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлическая система программного управления стреловидным рабочим органом горной машины | 1974 |
|
SU540038A1 |
| ГОРНОПРОХОДЧЕСКАЯ МАШИНА С ГИДРОМЕХАНИЧЕСКИМ РАБОЧИМ ОРГАНОМ | 1995 |
|
RU2100598C1 |
| Гидропривод рабочего органа горной машины | 1987 |
|
SU1507969A1 |
| Устройство для управления стреловидным исполнительным органом проходческого комбайна | 1988 |
|
SU1602987A1 |
| ПРОХОДЧЕСКО-ОЧИСТНОЙ КОМБАЙН | 1998 |
|
RU2142561C1 |
| РЕКУПЕРАТИВНЫЙ ГИДРОПРИВОД ЛЕСОХОЗЯЙСТВЕННОГО АГРЕГАТА | 2007 |
|
RU2338352C1 |
| РЕКУПЕРАТИВНЫЙ ГИДРОПРИВОД ПОЧВООБРАБАТЫВАЮЩЕГО АГРЕГАТА | 2005 |
|
RU2294613C1 |
| Исполнительный орган фронтального агрегата | 1983 |
|
SU1105637A1 |
| ГИДРОПРИВОД ПОЧВООБРАБАТЫВАЮЩЕГО АГРЕГАТА | 2010 |
|
RU2444877C1 |
| Гидравлическая система программного управления стрелой горной машины | 1983 |
|
SU1218099A1 |