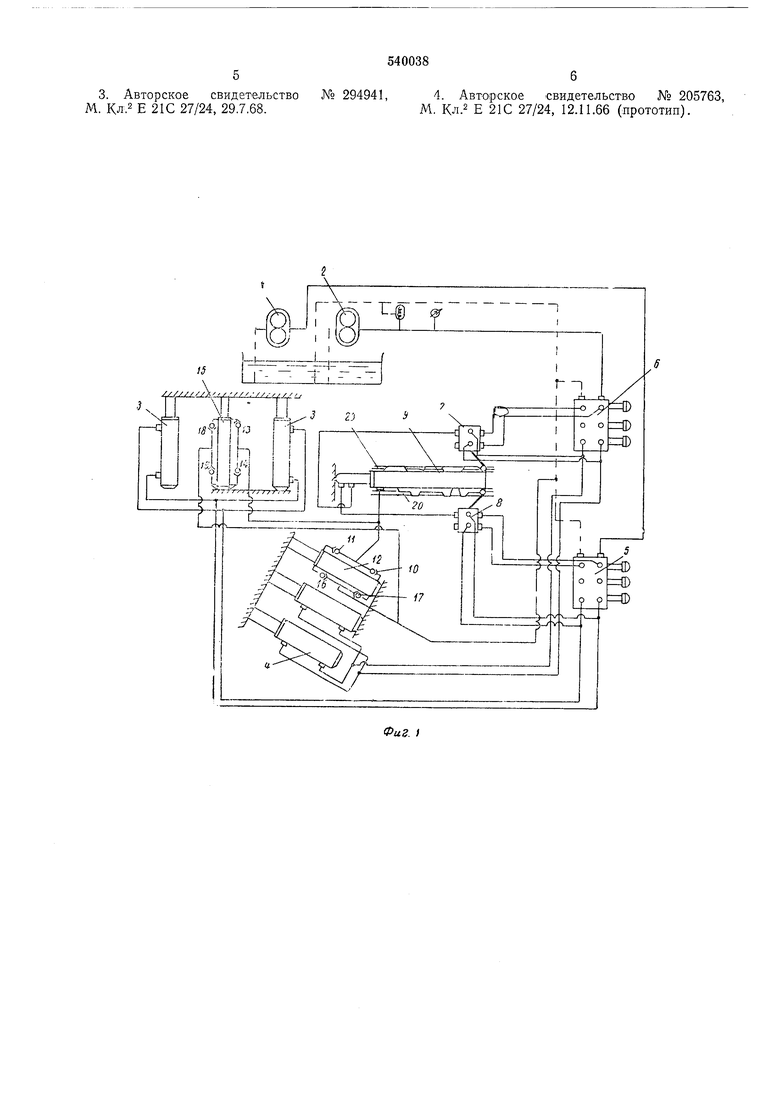
распределителем 7 горизонтального перемещения и золотниковым гидрорасп-ределителем 8. Гндрсраопределнтели 7 и 8 одним выходом соедилен-ы с поршневой полостью гидродомкрата-приемника 9, а другим выходом соответственио с гидродомщратами 3 и 4 вертикального и горизонтального премещеяия рабочего орга-на.
Штоковая полость гидродомкрата-приемника 9 соединена через обратные клапаны 10 и 11 со штоковой и поршневой полостями гидродомкрата-датчика 12 горизонтального neipeмещения рабочего органа и через обратные клапаны 13 и 14 со штоковой и поршневой полостями гидродомкрата-датчика 15 вертикального перемеш,ения рабочего органа. В свою очередь упомянутые полости гидродомкратов-датчиков 12 и 15 через обратные клапаны соответственно 16, 17 и 18, 19 соединены со сливом.
На корпусе гидродомкрата-приемника 9 жестко закреплены программные элементы 20, выполненные в виде профилированных реек и взаимодействующие с золотниками гидрораспределителей 7 и 8.
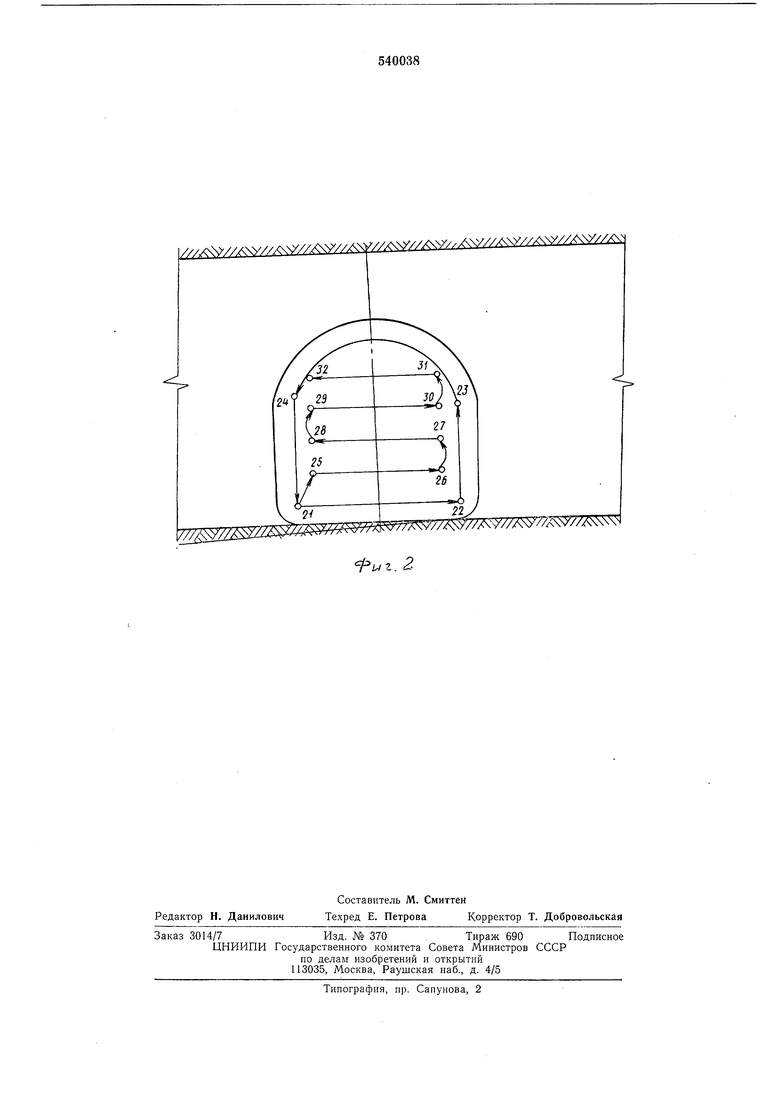
При обработке забоя рабочий орган (см. фиг. 2) последовательно перемещается из положения 21 в положение 22, 23, 24, 25, 26, 27 28, 29, 30, 31 ив положение 32.
Гидравлическая система программного управления работает следующим образом. Включаются электродвигатели комбайна. Рабочий оргаи находится в точке 21 (см. фиг. 2). Гидродомкрат-приемник 9 (см. фиг. 1) с программной /рейкой 20 находится в сокращенном положении. Гидрораспределитель 7 горизонтального перемещения рабочего органа включен программной рейкой.
При этом .рабочий орган перемещается по линии 21-22 вправо. В результате сокращения гидродомкратов 4 горизоптального перемещения сокращается кинематичеоки связанный с ним гидромкрат-датчик 12, из поршневой полости которого рабочая жидкость вытесняется и подается через обратный клапан 10 в штоковую полость гидродомкрата-приемника 9 с программной рейкой 20. Гидродомкратприемник 9 при движении рабочего органа по линии 21-22 раздвигается и в точке 22 (см. фиг. 2) программной рейкой 20 включится гидрораспределитель 8 на подъем рабочего органа, а гидрораспределитель 7 выключится.
При подъеме рабочего органа раздвигается гидродомкат-датчик 15, кинематически связанный с гидродо1мкратами подъема 3. Рабочая жидкость из щтоковой полости гидродо1Мкрата-датчика 15 через обратный клапан 13 подается в штоковую полость гидродомкратаприемника 9, который, раздвигаясь, в точке 23 контура выработки программной рейкой 20 включает золотник п-гдрораспределителя 7 в положение передвижки рабочего органа влево,
Так как рабочая жидкость подана к гидродомкратам 3, 4 вертикального и горизонтального перемещения, рабочий орган благодаря механической его связи с корпусом машины премещается строго по кривой 23--24 до точки 24. В точке 24 программная рейка 20 гидродомкрата-прнемника 9 включает золотник гидрораопределителя 8 на опускание рабочего органа до точки 21. В точке 21 программная рейка 20 вследствие раздвижки гидродомк|р1ата-нрнемника 9, переключит золотник гидрораспределителя 8 на перемещение рабочего органа по горизонтали вправо-, а золотник гидрораспределителя 7 - на подъем рабочего органа. Таким образом рабочий орган перемещается по линии 21-25. Раздвижка гидродомкрата-приемника 9 заканчивается в точке 32. В этой точке программная рейка 20 включает второй золотник гидрораспределителя 8 на сокращение гидродомкрата-приемника 9. Сократившись, гидродомкрат-1Приемник
9 программной рейкой 20 включает золо-тники гидрораспределителей 7, 8 на перемещение рабочего органа вниз и влево, а комбайн подается на следующую заходку, цикл обработки забоя повторяется.
Для перехода на ручное управление комбайном, необходимо переключить гидропереключатели 5 и 6.
Формула изобретения
1. Гидравлическая система программного управления стреловидным рабочим органом горной мащнны, содержащая насосную станцию, гидродо1МК|раты горизонтального и вертикального перемещения рабочего органа, золотниковые гидрораспределители, обратные клапаны, гидродомкраты-датчики, горизонтального и вертикального перемещения рабочего органа, гидродомкрат-приемник и программные элементы, отличающаяся тем,
что, с целью повышения надежности системы на корпусе цилиндра гидродомкрата-приемника жестко закреплены программные элементы, взаимодействующие с золотниками гндрораспределителей горизонтального и вертикального
перемещения, каждый из которых одним каналом соединен с поршневой полостью гидродомкрата-приемника, а вторым каналом - с гидродомкратом соответственно горизонтального и вертикального перемещения, причем
штоковые и прошневые полости гидродомкратов-датчиков горизоитального и вертикального перемещения рабочего органа соответственно че/рез одну пару обратных клапанов соединены со щтоковой полостью гидродомкратаприемника, а через другую пару обратных клапанов - со сливом.
2. Гидравлическая система по п. 1, отличающаяся тем, что программные элементы выполнены в виде профилированных реек.
Источники информации, принятые во внимание при экспертизе:
1.Авторское свидетельство № 179717, М. Кл.2 Е 21С 35/24, 30.9.64.
2.Барон Л. И., Шестимиров А. А. «Проходческие комбайны, М. 1970 г., стр. 49. 5 3 Авторское свидетельство № 294941, М. Кл.2 Е 21С 27/24, 29.7.68. 6 4. Авторское свидетельство № 205763, М. Кл. Е 21С 27/24, 12.11.66 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлическая система программного управления стреловидным рабочим органом горной машины | 1978 |
|
SU767347A1 |
| Устройство для управления стреловидным исполнительным органом проходческого комбайна | 1988 |
|
SU1602987A1 |
| ГОРНОПРОХОДЧЕСКАЯ МАШИНА С ГИДРОМЕХАНИЧЕСКИМ РАБОЧИМ ОРГАНОМ | 1995 |
|
RU2100598C1 |
| Гидросистема управления механизированной крепью | 1980 |
|
SU949198A1 |
| Устройство контроля положения исполнительного органа горной машины в профиле пласта | 1978 |
|
SU771331A1 |
| Гидросистема секции механизированной крепи | 1985 |
|
SU1283414A1 |
| Гидросистема секции механизированной крепи | 1981 |
|
SU1070319A1 |
| Устройство управления режимами работы выемочного агрегата для пластов крутого падения | 1986 |
|
SU1320411A2 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ПРЕИМУЩЕСТВЕННО МОБИЛЬНОЙ УСТАНОВКИ С КАЧАЮЩЕЙСЯ ЧАСТЬЮ | 2015 |
|
RU2629763C2 |
| Манипулятор для установки элементов крепи | 1978 |
|
SU877046A1 |
х///: //
24
-о , 2lJ
% z /Л- //Л y.
