1
Изобретение относится к области . весоизмерительной-. те сники и может найти применение в вагонных или автомобильных весах, в автоматических j дозаторах и в других системах, основанных на применении преобразователей неэлектрической величины в электрический сигнал, в частности магнитоупругих силоизмерительных датчиков. Q
Известны весоизмерительные устройства, в которых повышение точности достигается за счет уменьшения влияния погрешностей первичных измерительных преобразователей на результат , взвешивания СИНедостатками устройств такого типа являются сложность и большое время .взвешивания.
Наиболее близко по технической . jn сущности к изобретению весоизмерительное устройство, содержащее, силоизмв рительный датчик, к выходу которого через диод, включенный в прямом наг/равлении, подключены сопротивление 25 нагрузки и фильтр, цифровой вычислительный блок, аналого-цифровой преобразователь, через который фильтр включен на вход цифрового вычислительного блока, к другому входу кото- Q
рого подключен блок управления, а к выходу - блок индикации, блок линеаризации, входом и выходом связанный с соответствующими входом и выходом цифрового вычислительного блока 2.
Недостатками устройства являются большое время измерения и сравнительно, низкая точность.
Цель изобретения - повышение точности взвешивания.
Поставленная цель достигается тем/ что весоизмерительное устройство снабжено вторым сопротивлением нагрузки, отличным от первого по величине, вторым диодом, подключенным в обратном направлении к выходу датчика, вторым фильтром и аналого-цифровым преобразователем, через который выход фильтра подключен к второму входу цифрового вычислительного блока, и блоком преобразования выходного сигнала силоизмерительного датчика в образцовый коэффициент преобразования этого же датчика, входы и выходы которого включены на соответствующие входы и выходы цифрового вычислительного блока.
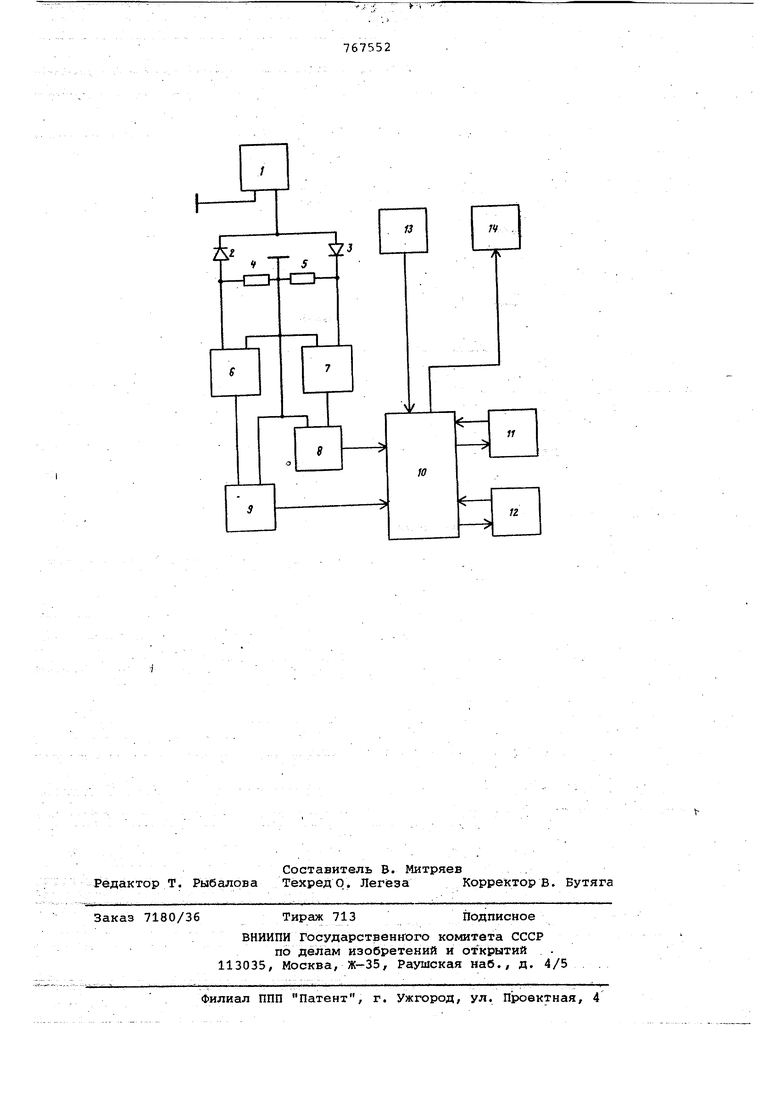
На чертеже изображена схема весоизмерительного устройства. Весоизмерительное устройство содёржит магнитоупругий силоизмерйтель ный датчик 1, выпрямители 2 и 3 в вы ходнбй цепи. , резисторы 4 и 5 ° cal 6 Wfe7igkft5i которых неодинаковые, фильтры б и 7, аналого-цифровые прео -разователи 8 и 9, цифровой вычислительный блок 10., блок линеаризации 11/ блок 12 преобразЬвания выходного Сигнала силризмерительного датчика в образцовый коэффициент преобразования этого же датчика, блок управлени 13 и блок 14 индикации и регистрации результатов взвешивания. Выпрямйтель 2 катодом и выпрямитель 3 анодом присоединены к выход ШК1:5Г § ажйМу сил ойз мерит а ль но го датчика 1, второй выходной Зажим которо го присоединен к ббщей шине. Выпря Ш лй Делят цепь выходного датчика на две ветви. К выходу выпрямителя 2 подключены резистор через фильтр 6вход аналого-цифрового преобразова теля 9. К выходу выпрямителя 3 под ЙЯЙЧёНы резистор 5 и через фильтр 7 вХбД аналого-цифрового преобразователя 8. Выходы аналого-цифровых преобразователей соединены с цифровым вычислительным блоком 10. Управляющие команды при работе ве соизмерительного устройств формиру ются блоком управления 13. Магнитоупругие силоизмерительные Дйтчикй с перекрестным райгюлбженйём имеют мостовую структуру маг нитной цепи. При мостовой схеме магнитной цепи зависимость между выходом и входом магнйтоупругого датчика можно прейставить следуквдим уравнени ем: и - выходное напряжение; F - измеряемая сила; .л,,;. ...v-:. : а, b - параметры функции преобразования датчика, зависящие от особенностей конструкции Датчика и от условий ..,...j ,„. эксплуатации; ..;;л..;.-...., ::. г - сопротивление нагрузки подключенной к выходу датЧИКЭ. ----- --. :-i---..-/.i:.-..--,-j,;«.-fA..--,--JwdA,% г:.. Такую же функцию преобразования NiOSfflbsОписать для электрической мостовой схемы с тензорезисторным преоб 15аз6в&телем, включенным в одно из плеч мойта, и для мостовых схеме датчиками других типов. Коэффициент преобразования не ой ается неизменным из-за рядг причин, 11риводя1цих к по грешное ям. Коэффициент преобразования а4 Загвисит от измеряемой силы, темпера урйу предыдущей нагрузки, От 1в1 емени ёкёплуатации,датчика и т. п. Будем
767552 считать, что параметр Ь не изменяется, а изменение коэффициента преобразований отнесем за счет изменения параметра а. Путём увеличения сопротив ления нагрузки г отношение Ь/г можно иметь в 10-20 раз меньше, чем параметр а. . Пусть при действуквдей на датчик силе F и сопротивлении нагрузки г г, вьисОдное напряжение равно U( , а при г.Гу вькодное напряжение равно U , По результатам двух измерений (при , ; и при ) можно найти параметр а . (а +, )и, F - (а + .. . откуда ) tr, - Vi При градуировке, когда известна действующая на датчик сила F, можно определить параметр Ь, соответствующий этой силе g.rU-j-y 1гТ) в случаеградуировки при каждом фиксируемом через определенные интервалы значений действующей На датчик силы измеряют выходные напряжения U/ .и Uj. соответствующие двум значениям сопротивления нагрузки г, и , подключенной к выходу датчика, затем определяют из выражения (4) параметр Ь или задаются значением этогопараметра.По результатам измерений из уравнения (3) для каждого значения силы находит образцовый параметр asa , а из выражения (2) - образцовый коэффициент преобразования датчика f которые запоминают вместе с соответствующими значениями и,. При рабочей Измерений силы тяжести взвешиваемого объекта измеряемся выходное напряжение U, при сопротивлении нагрузки г, и вйкодагоё йапряжение (}j п1рй сопротивлении нагрузки г . По результатам измерений по формуле (3) оп| ёдёля1Й п 1рЙ1Йё Г1) а принятом при градуировке значейИи параметра Ь, и по формуле (2) вычисляется коэффициент преобразования . . .. - . По значению и, и rife йайным, полуе1Гйым п)й трсдуйровке, находится приближенйое зйаченИе образцового ко ффициента преобразования, затем по формуле U -О К вычисляют иапряжетгие 0 , сбОФветству-. ющее градуировочной характеристике.
и соответствующую этому напряжению действительную силу тяжести в,звешиваемого объекта.
Устройство работает следующим образом.
Взвешиваемый объект через грузоподъемную платформу воздействует на магнитоупругий силоизмёрительный датчик 1, выходное напряжение которого зависит от силы тяжести взвешиваемого объекта. Переменный ток в выходной цепи в один полупериод проходит через выпрямитель 2 и резистор 4, а в другой полуперйод - через выпрямитель 3 и резистор 5. Сопротивления резисторов 4 и 5 неодинаковые, в результате чего на .вьаходы аналого-цифровых преобразователей 8 и 9 поступают напряжения разной величины (см. формулу 1).
При градуировке весоизмерительного устройства при каждом фиксируемом через равные интервалы значении действующей на датчик силы значения вы-ходных напряжений и,, и и,, получают непосредственно с индикаторов аналого-цифровь1х преобразователей 8 и 9, затем по формулам (3), (4) и (5) определяют значения коэффициента преобразования К, соответствующие измеренным значениям выходного напряжения и,. Выходное напряжение Ut , измеренное по силе, равной верхнему пределу диапазона измерений датчика, делят на п одинаковых интервалов и получают, таким образом, п значений .образцового выходного напряжения (без учета нулевого значения). Для каждого образцового выходного напряжения и, по полученным значениям U, и К путем интерполяции находят значения образцового коэффициента преобразования К . Значения KI. вместе .с соответствующими ему значениями вводят в блок 12 преобразования выходного сигнала силоизмерительного датчика в образцовый коэффициент преобразования этого же датчика.
При работе устройства соответствующие силе тяжести взвешиваемого объ-. екта выходные напряжения и , Uj. (в двоичном коде) с выходов аналого-цифровых преобразователей 8, 9 передаются в регистры памяти цифрового вычислительного блока 10. В блоке 10 в соответствии с уравнениями (2.) и (3) вычисляется коэффициент К преобразования датчика при реальных условиях, т. е. при наличии погрешностей. Потом из блока 10 в блок 12 вводится напряжение U, , а из блока 12 в блок 10 поступают два значения обра зцового напряжения U и UL4 (ближайшее большее и меньшее к U,) и соответствуклцие этим значениям образцового коэффициента преобразования К, и . По этим данным в блоке 10 вычисляетйя образцовый коэффициент преобразования Kg
к 1 i. bi Ku f.j , . ° UU.-UL a затем уточненное значение выходного напряжения
Из блока 10 напряжение U в цифро0вом коде подается на вход блока линеаризации 11 а с выхода блока 11 в блок 10 поступают данные, по которым вычисляется сила тяжести взвешиваемого рбъекта.
5
Информация о силе тяжести взвёши.ваемого объекта из блока 1-0 переводится в блок 14 индикации и регистрации, где в виде числа, равного весу объекта, высвечивается на табло и печатается на бумаге цифропечатающим
0 устройством.
Формула изобретения
5
Весоизмерительное устройство, содержащее силоизмёрительный датчик, к выходу которого через диод, включенный в прямом направлении, подключены сопротивление нагрузки и фильтр,
0 цифровой вычислительный блок, аналого-цифровой преобразователь, через который фильтр включен на вход цифрового вычислительного блока, к другому входу которого подключен блок
5 управления, а к выходу - блок индикации, блок линеаризации, входом и выходом связанный с соответствующими входом и выходом цифрового вычислительного блока, отличающе0еся тем, что, с целью повышения точности взвешивания, оно снабжено вторым сопротивлением нагрузки, отличным от первого по величине, вторым диодом, подключенным в обратном
5 .направлении к выходу датчика, вторымифильтром и аналого-цифровым преобразователем, через 1 оторый выход фильтра пс5йключ;ён к второму входу цифрового вычислительного блока, и блоком преобразования выходного сигнала
0 силоизмерительного датчика в образцовый коэффициент преобразования этогоже датчика, входы и выходы которого включены на соответствующие входы и выходы цифрового вычислительного бло5ка.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 398834, кл. G 01 G 23/36, 1968.
0
2.Вромберг Э. М. и др. Тестовые методы повышения точности измерения. Энергия, 1978, с. 144, рис. 7 (прототип).
7V
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕСОИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 1973 |
|
SU398834A1 |
| Способ уменьшения температурнойпОгРЕшНОСТи BECOB | 1979 |
|
SU821966A1 |
| Способ измерения сил магнитоупругим преобразователем | 1987 |
|
SU1525487A2 |
| Способ измерения сил магнитоупругим преобразователем | 1984 |
|
SU1224619A2 |
| Магнитоупругое силоизмерительное устройство | 1988 |
|
SU1597615A1 |
| УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯДВИЖУЩИХСЯ В СОСТАВЕ ПОЕЗДА ОБЪЕКТОВ,НАПРИМЕР ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ | 1971 |
|
SU432347A1 |
| Способ измерения сил магнитоупругим преобразователем | 1978 |
|
SU887948A1 |
| Способ измерения механических напряжений | 1985 |
|
SU1273754A1 |
| Крановые весы | 1979 |
|
SU838391A1 |
| Устройство для поверки силоизмерительных преобразователей | 1988 |
|
SU1597635A1 |