1
Изобретение относится к области весоизмерительной техники.
Известные весоизмерительные устройства для взвешивания объектов, движундихся в составе поезда, содержащие грузоприемную платформу, опирающуюся на силоизмерительные датчики, вторичный измерительный прибор с аналого-цифровым преобразователем и механизм наложения эталонного груза, недостаточно точны.
Для повышения точности измерения предлагаемое устройство снабжено узлом автоматической установки нуля и блоком коррекции масштаба преобразования, выполненными в виде переменных резисторов, переключаемых шаговыми искателями, управляемыми трехпозиционпым иуль-органом ан1алого-цифрового преобразователя.
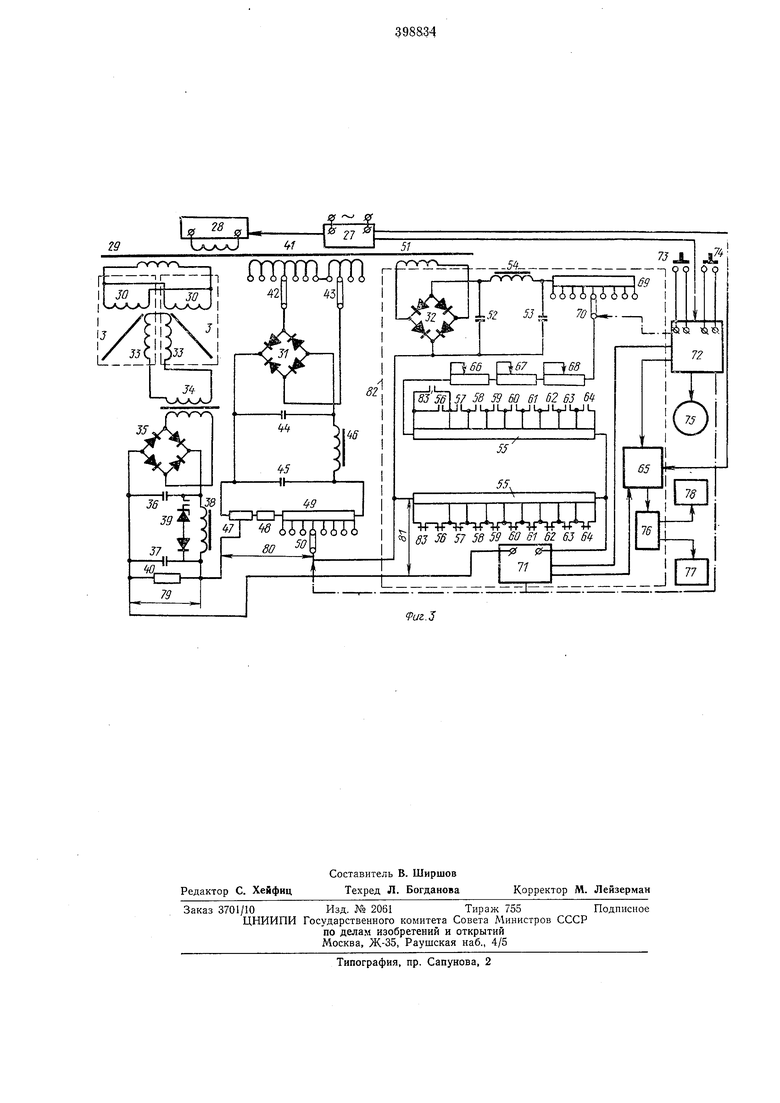
На фиг. 1 изображен общий вид описываемого устройства; на фиг. 2 - вариант кинематической схемы механизма наложения эталонного груза; «а фиг. 3 - ирииципиальная электрическая схема устройства.
Грузоприемная платформа / через промежуточные шаровые опоры 2 опирается на силоизмерительиые датчики 3, например магнигоупругие, установленные на фундамено-е 4. Под платформой У в ее центральной части на раме 5 установлен механизм 6 наложения эталонного груза, управляемый автоматически и кратковременно прилагающий эталонную нагрузку к платформе 1 при автоматическом контроле точности весов перед взвешиванием
груза. ЛТеханизм наложения эталонного груза выполнен рычажным и состоит (фиг. 2) из двух неравноилечих рычагов7 и 8, соединенных меладу собой серьгой 9. Каждый рычаг снабжен тремя стальными закаленнымн ирнзмами 10-15 (призмы 10 и 12 - опорные, призмы }, 13, 14 и 15 - грузоириемные). Для уравновешивания рычагов относительно призм 10 и 12 применены противовесы 16 и 17. Па конце грузового рычага 7 имеется фиксатор 18 для запирания рычага при балансировке устройства на «нуль и во время взвешивания груза.
Механизм наложения эталонного груза содержит также исполнительный механизм 19 с
кривошипом 20 и кулачком 21, шатун 22, кулису 23 и поддон 24 с эталонным грузом 25.
Кулачок 21 на валу кривошипа 20 служит для разворота грузового рычага 7 при запирании его фиксатором. Эталонный груз 25 снабжен упором 26 для разворота промежуточного рычага 8 относительно призмы 12 с целью отрыва его от серьги 9.
Электрическая часть описываемого устройства содержит следующие узлы:
блок питания 27;
стабилизатор напряжения 28 с трансформатором 29, от которого питаются обмотки возбуждения 30 магнитоупругих датчиков 5 и выпрямители опорных напряжений 31 и 52; сигнальные обмотки 33 датчиков 3 соединены последовательно и согласно;
узел преобразования суммарного выходного сигнала магнитоупругих датчиков 3, состоящий из согласующего (повышающего) трансформатора 34, выпрямителя 35 с фильтром, который содержит конденсаторы 36 и 37 и дроссель 38 с шунтирующей цепью со стабилитроном 39 для снижения постоянной времени и нагрузочное сопротивление 40;
узел балансиро)зки весов на «нуль, состоящий из вторичной многосекционной обмотки 41 трансформатора 29, переключателей 42 и 43, выпрямителя./, фильтра из конденсаторов4-, 45 и дросселя 46, сопротивлений 47, 48 и потенциометра 49 с шаговым искателем 50;
аналого-цифровой преобразователь (АЦП), состоящий из выпрямителя опорного напряжения 32, питающегося от обмотки 51 трансформатора 29, фильтра из конденсаторов 52, 53 и дросселя 54, делителя Н1апряжения 55 с ключами 56-64, управляемыми распределителем 65, масштабных сопротивлений 66, 67, 68, переменного сопротивления 69 для корректировки масщтаба преобразования, шагового искателя 70, переключающего .сопротивление 69, и трехпозиционного нуль-органа 77;
блок 72 автоматизации работы, управляющий работой схемы с кнопкой 73 подготовки к работе и кнопкой 74 работы;
двигатель 75 исполнительного механизма для привода механизма автоматического налол ения и снятия эталонного груза 25;
дещифратор 75;
световое цифровое табло 77;
цифропечатающий блок 78.
Описываемое устройство работает следую.щнм образом.
Суммарное выходное напряжение сигнальных обмоток 33 силоизмернтельных датчиков 3, пропорциональное весу груза, находящегося на платформе /, поступает на первичную обмотку согласующего трансформатора 34. Со вторичной обмотки сигнал поступает на выпрямитель 35, к выходу которого через фильтр включено нагрузочное сопротивление 40. Величина этого сопротивления принимается из условия обеспечения оптимального режима работы магнитоупругих датчиков .
Напрян :ение сигнала 79 иа сопротивление 40 с помощью трехпозиционного нуль-органа 71 сравнивается с опорными напряжениями 80 и 81, снимаемыми с сопротивлений 47, 48, цотенциометра 49 и с делителя напряжения 55. Напряжение 80 уравновещивает напряжение -сигнала 79 при отсутствии груза на платформе весов.
При наличии груза на весах разность напряжений 79 ;И 80, пропорциональная весу груза, (поступает на вход аналого-цифрового преобразователя (АЦП) 82 и автоматически
уравновешивается напряжением 81, формируемым на выходе делителя 55 при работе АЦП 82.
В процессе уравновешивания напряжения 5 АЦП 82 вырабатывает цифру в коде 2-4- -2-1, соответствующую весу груза, которая поступает от распределителя 65 через дешифратор 76 на световое цифровое табло 77 и цифропечатающий блок 78.
10 Опорное напряжение 80 регулируют при настройке весов вручную с помощью переключателей 42 и 43 (грубо) и сопротивления 47 (точно).
При эксплуатации весов опорное напряже15 ние 80 регулируется автоматически лри включении весов в работу с помощью потенциометра 49, переключаемого контактами шагового искателя 50. Масштаб преобразования напряжения сигнала (79-80) в цифру АЦП 82 устанавливают с помощью переменных сопротивлений 66, 67 и 68 вручную при настройке весов.
При эксплуатации весов масштаб преобразовалия, с целью поддержания требуемой точ5 ности, автоматически корректируется с помощью переменного сопротивления 69, переключаемого контактами шагового искателя 70. Шаговые искатели 50 и 70, переключающие потенциометр 49 и (переменное сопротивление
0 69, управляются блоком автоматизации работы 72, в который поступают сигналы от нуль-органа 71 аналого-цифрового преобразователя 82.
При длительной эксплуатации весов после
5 их настройки в результате загрязнения весовой платформы, изменения темнературы и по ряду других причин может возникнуть небольшой дрейф нуля и измениться масштаб весов. Поэтому, с целью поддержания требуемой
0 точности, весы при включении в работу автоматически корректируются на «нуль и по масштабу с помощью шаговых искателей 50, 70 и механизма наложения эталонного груза, управляемых блоком 72.
5 В момент включения схемы весов в электрическую сеть на весах не должно быть груза, а грузовой рычаг 7 развернут относительно опорной призмы 10 и заперт фиксатором 18.
0 При этом промежуточный рычаг 8 развернут относительно призмы 12 и не касается серьги 9.
Вследствие такого положения рычагов при балансировке весов на «нуль вместе с тарой
5 весовой платформы будет учитываться и вес грузового рычага 7 с серьгой 9, уравновешенных противовесом 16.
В случае ухода «нуля и возникновения вследствие этого сигнала рассогласования на
0 входе нуль-органа 71 s блок 72 от нуль-органа 71 поступает сигнал. Блок 72 при этом подает импульсы в шаговый искатель 50, который переключает потенциометр 49 до уравновешивания входного сигнала 79 опорным напряжением 80. В момент уравновешивания
напряжений 79 и 80, т. е. в момент, когда весы сбалансированы, в блок 72 шоступает импульс от нуль-органа 71. В результате прекращается работа шагового искателя 50 (балансировка на «нуль - завершена).
Затем блок 72 включает двигателъ 75 исполнительного механизма 19 и реле 83. Исполнительный механизм 19 поворачивает кривошин 20 на 180° для наложения эталонного груза 25 на призму 14 промежуточного рычага 8. Промежуточный рычаг ложится на серьгу 9, которая при этом выдергивает грузовой рычаг 7 из фиксатора 18. После наложения груза 25 на весовую платформу / действует эталонная нагрузка 84, значение которой завиеит только от передаточного отношения плеч рычагов 7, § и от веса груза 25. Так как рычаги полностью уравновешены противовесами 16 и 17, то собственный вес рычагов не оказывает влияния на эталонную нагрузку 84.
После приложения эталонной нагрузки 84 к платформе / контакты реле 83 в непи делителя 55 переключают эталонные со-противлепия. Прн этом на выходе делителя формируется опорное напряжение 81, которое при отсутствии погрешности должно соответствовать в принятом масштабе преобразования эталонной нагрузке 84, приложенной к весовой платформе 1 с помоихью механизма 6.
При несоответствии .напряжения 81 эталонной нагрузке 84 от трехпозиционного нульоргана 71 в блок 72 поступает импульс, соответствующий знаку рассогласования (больще - меньше). При этом блок 72 включает в работу шаговый искатель 70. переключающий масштабиое сопротивление 69 до устранения рассогласования между опорным иа1пряжением 81 и эталонной нагрузкой 84 в масштабе выходного напряжения 79. В момент уравновешивания напряжений (79-80) и 81 .нуль-орган 71 подает импульс в блок 72, в результате чего прекращается работа шагового искателЯ 70.
После доведения сигнала рассогласования до допустимого значения блок 72 включает двигатель 75 исполнительного механизма 19,
в результате чего снимается эталонная нагрузка 84 с весов.
При включении двигателя исполнительный механизм, поворачивая кривошип 20 на 180°, через систему рычагов, поднимает поддон 24 и снимает эталонный груз 25 с грузоприемиой призмы 14 промежуточного рычага 8. При этом упор 26 касается промежуточного рычага и разворачивает его вокруг призмы 12, отрывая рычаг от серьги 9. Одновременно исполнительный механизм поворачивает кул ачок 21, установленный на валу кривошипа. Кулачок при повороте касается грузового рычага 7 и разворачивает его вокруг опорной
призмы 10. При этом ерабатывает фикеатор 18, запирающий грузовой рычаг, а кулачок затем в конце движения выходит из соприкосновения с этим рычагом. После этого блок 72 выключает двигатель
75 исполнительного механизма 19 и устройство готово к работе.
Благодаря развороту промежуточного рычага 8, а также развороту и запиранию грузового рычага 7 устраняются динамические
погрешности от рычагов при взвешивании движущихся по весам объектов.
Предлагаемое устройство обеспечивает высокую точность пзмерения в течение длительного срока эксплуатации.
Предмет .и з о б р е т е н: и я
Весоизмерительное устройство для взвешивания объектов, движущихся в составе поезда, содержащее грузоприемную платформу, опирающуюся на силоизмерительные датчики, вторичный измерительный прибор с аналогоцифровым преобразователем и механизм налоЛСення эталонного груза, отличающееся тем, что, с целью повышения точности измерения, оно снаби ено узлом автоматической установки нуля и блоком коррекции масштаба преобразования, выполненными в виде переменных резисторов, переключаемых шаговыми искателями, управляемыми трехпозиционным нуль-органом аналого-цифрового преобразователя. TWT T-№i Фиг 1
Pcjs.2 7:sS r «5-T«;f и
--54 v V4-«-r
TJTiAiii
.52 ..
57 58 59 60 61 62 63 6«
frrrrrr
Чг Л-г чЛАгЦЛААг
J // 57 58 59 60 51 62 6J S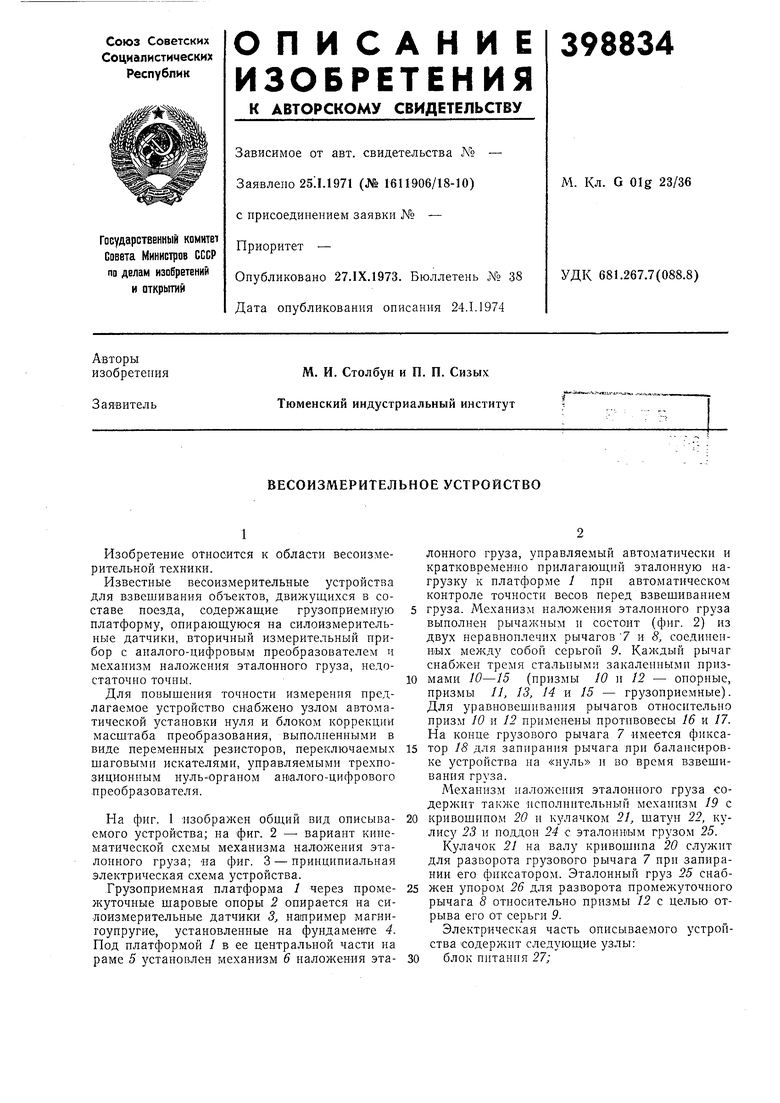

| название | год | авторы | номер документа |
|---|---|---|---|
| ПЛАТФОРМЕННЫЕ ВЕСЫ | 1971 |
|
SU435460A1 |
| ТЕРМОГЕНЕРАТОР | 2007 |
|
RU2355911C2 |
| РОТОРНЫЙ ДВИГАТЕЛЬ ВНЕШНЕГО И ВНУТРЕННЕГО СГОРАНИЯ | 2000 |
|
RU2202701C2 |
| ВЗВЕШИВАЮЩЕЕ УСТРОЙСТВО НА ТРАНСПОРТНОМ СРЕДСТВЕ | 1993 |
|
RU2091723C1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ВОЖДЕНИЮ ВОЕННЫХ ГУСЕНИЧНЫХ МАШИН С РУЛЕВЫМ УПРАВЛЕНИЕМ | 2013 |
|
RU2542694C1 |
| Устройство для взвешивания животных | 1986 |
|
SU1613872A1 |
| Захватное устройство для раскрывающейся тары | 1988 |
|
SU1654226A1 |
| УСТАНОВКА ДЛЯ ПРОВЕРКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ АВТОМОБИЛЕЙ | 1969 |
|
SU238197A1 |
| Способ определения нагрузочной способности сухих трансформаторов и устройство для его осуществления | 1985 |
|
SU1278732A1 |
| УСТРОЙСТВО для ПОСТРОЧНОГО ФОТОГРАФИРОВАНИЯТЕКСТА | 1970 |
|
SU259626A1 |