Изобретение относится к области весоизмерительной техники.
Известны устройства для взвешивания движущихся в составе иоезда объектов, .наиример железнодорожных .вагонов, содержащ,ие платформу, опирающуюся через силоизмерительные датчики на фундамент, датчики для определения положения объекта на платформе, аналого-цифровой преобразователь, вычислительные и регистрирующие блоки.
Эт.и устройства не обеспечивают требуемую точлость.
|Предлагае1Мое устройство снабжено датчиками определения положения осей автосцепок объектов, находящихся на платформе, установленнькми у платфор.мы на уровне головок автосцепок объектов, и датчико.м измерения продольных горизонтальных усилий, действующих на платформу при прохождении по ней объекта, уста.новленны.м в продольной горизонтальной тяге, связаниой щарнирно с платформой и фунда.ментом, подключенными на вход алалого-цифрового преобразователя через вычислительные и преобразующие блоки.
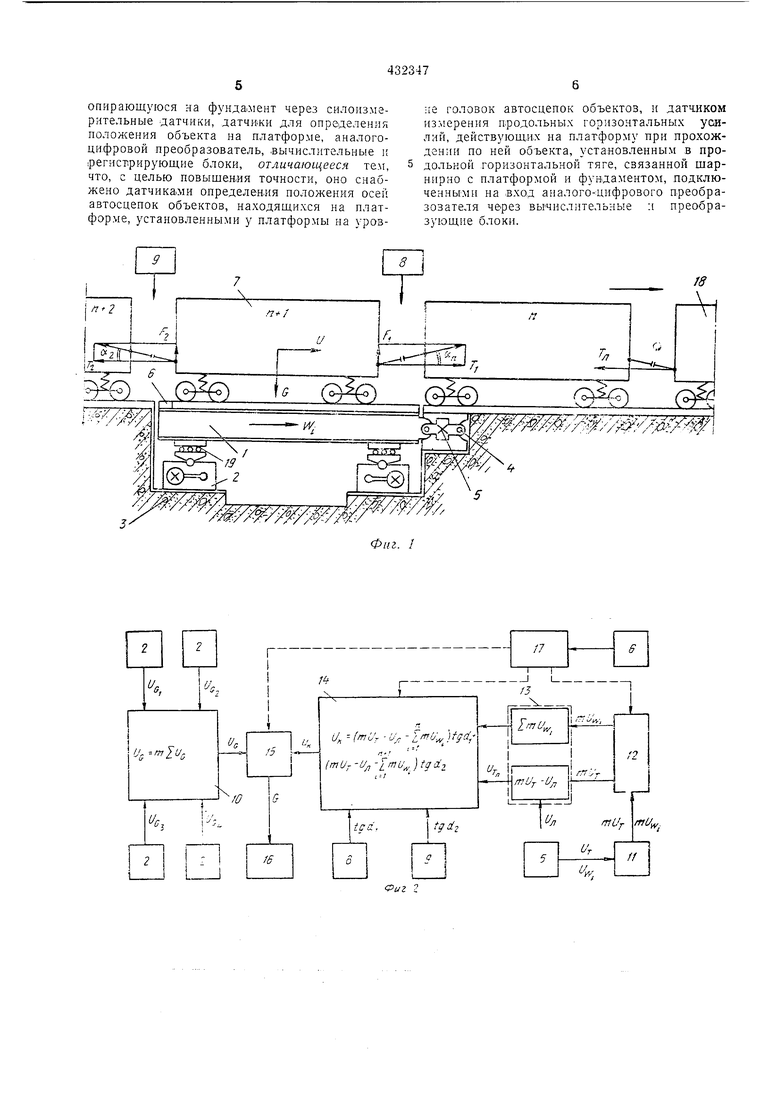
На фиг. 1 показан общий вид описываемого устройства; на фиг. 2 - его блок-схема. Платфор.ма / через силоизмер.ительные датчики 2 опирается на фунда мент 3. В горизонтальную тягу 4 вмонтировал датчик 5,
из.меряющин продольные горизонтальные усилия. Датчик 6 служит для определения положения объекта 7 на платформе /. Датчики S, 9 служат для определения положения осей
автосцепок 7, находящегося на платформе /.
Силоизмерительные датчики 2 подключены к вычислительнолп блоку 10. Датчик 5 через маощтаб.ный преобразователь // и распределитель 12 подключен ,к вычислительному блоку 13, выходы которого подсоединены к вЫЧ.ислительному блоку 14. На входы вычислительного блока 14 подключены также датчики 8 и 9. Вычислительный блок 10, вырабатывающий информацию о весе объекта 7, и вычислительный блок 14, вырабатывающий поправку к результату из1мерения веса объекта 7, падключены на входы аналого-цифрового преобразователя (АЦП) 15, выход которого
подключен ,к светово.му табло 16 цифровой индикации.
Последовательность работы всех элементов схемы обеспечивает блок управления 77, получающий илформацию от датчика 6.
Работает описываемое устройство следующим образом. Состав.из п числа объектов 7 (ватоно.в) и локомотива IS ироходит через платформу /. При движении локомотива 18 на платформу / действует про.дольное горизонтальное усилие, равное тяговому усилию
локомотива. Поскольку платформа / установлена на шариковых опорах 19, тягозог усплие .практически полностью воспринимается тягой 4 со встроенным в нее датчиком 5, вырабатывающим сигнал U-r, пропорциональный тяговому усилию локомотива 18. Сигнал и7 поступает на масштабный -преобразователь //, где преобразуется в масштабе опорного напрял(е1ния АЦП 15. После н-реобразо,вания сигнал mU,, где т - масштабный коэффициент преобразования, подается через распределитель 12 на вход вычислительного блока 13. Параллельно с этим на вход блска 13 поступает сигнал LJ,, пропорциональный силе сопротивления движению локомотива, приведенной к радиусу колес (эта сила - величина известная и примерно постоянная).
Информация, поступившая в блок /5, обрабатывается с целью определения напряжения и г.-,- и т-ty.i, проио рционального силе Гл, приложенной к автосцепке локомотива и равной сопротивлен.ию движения вагонов в cocTaiBe. Сигнал Uтл поступает в блок 14, где за;пс.м.пнается.
Определение поправ.ки к результату измерения веса рассмотрим на при.море взвешиван.ия (п+.1)-го вагона состава.
Предположил, что оси автосцепок (пН-1)-го вагона, находящегося на платформе /, расположены под некоторыми углами ai .и az относительно уровля Пути. Вследстаие этого тяговая сила от впереди идущего «-го вагона и тяговая реакция от сзади идущего (rt-f2)-ro .вагона пр.иложены -к взвешиваемому вагону соответственйо под углами aj .и а.
Тогда на хребтовую-балку («+1)-го вагона будут действовать не только горизонтальные продольные силы TI -и TZ. но и вертикальные силы FI и FZ, которые могут в значительиой степени исказить результат измерения веса вагона.
При ирохождеили (n+il)-ro вагона по платформе / с датчика 6 снимается сигнал, который восстанавливает схему в .начальное состояцие, т. е. сбрасывает предыдущие показания о весе п-ого вагона на «О и затем опять осуществляет запуск.
Весовые датчики 2 при этом вырабатывают сигналы Uoi, иG, , UQ, и (/Oj, суммарное значение которых пропорционально весу вагона.
Эти сигналы поступают .на входы вычислительного блока W, где осуществляется .их сум.мирование и преобразование в .масштабе опорного напряжения АЦП 15. Затем сигнал ,Uo, .пропорциональный весу G вагона, поступает на вход АЦП 15.
Одновременно с этим датчик 5 вырабатывает сигнал t/w.,,, , пропорциональный силе сопротивления движению W,,+i вагона. Сигнал V f.-„,l .поступает иа масштабный преобразователь 11, а после преобразования подается Через распределитель 12 .на вхо.д блока 13, где суммируется с предыдущими значенияЛШ аналогичных сигналов Uу. (в даииом конкретном примере сигнал ,i сумлшр-уется с ситиалом ,,-, полученном при шрохождении л-ого вагона через весы). Это производится с целью получения информации о продольной горизонтальной силе TZ, приложенной к автосцепке (/г+1)-го вагона. Пос
ле суммирования сигнал 2 mU w, поступает
(-1
в блок 14, .где уже хранится предыдущий сум//
марный сигнал Z mUy--, определенный пр.и
/+1 взвешивании я-ого вагоиа.
Таким образом, данные, введенные в вычислительный блок 14, 1ПОЗВОЛЯЮТ 1ВЫЧ)ИСЛИТЬ
.продольные усилия Tj ,и TZ, соответственно ПропорЦиомальные напряжениям
U,, niU.-U.. - mUy.;
1
и,, mU, - и, - 2 mUw..
1Параллельно с этим датчики 8 и 9 вырабатывают информацию о положении осей автосцепок, кото.рая затем вводится в блок 14 в виде тангенса угла наклона автосцепок относительно уровня пути tg tti и tg az.
Введенная информация обрабатывается в вычислительном блоке 14 в соответстБ.}.и со следующим алгоритмам: .
и,± (Up, + (У,) ± (U,, tg а, J- Ur, tg а,)
± mU, - и., - 2 mUw. - tg а :Ь
я+1
± mU, - У., - 2 g
где UK-напряжение поправки к результату из.мерения, соответствующее погрешности взвешивания от вертикальных сил FI и FZ. Таким образом, на входы аналого-цифрового преобразователя АЦП 15 .поступает наПряжение Uc, пропорциональное весу вагона G, и напряжение лапраики +UK с учетом знажа логрешности взвешивания о.т вертикальных сил.
В результате вырабатывается информация о ч.истом весе вагона G, которая преобразуется в .цифровые показания, индицируемые на световом табло 16.
Предмет изобретения
Устройство для взвешивания движущихся
в составе поезда объектов, наПример железнодорожных вагонов, содержащее платформу.
опирающуюся на фундамент через силонзмерительные аатчики, датч1-жи для определения положения объекта на платформе, аналогоцифровой преобразователь, вычислительные и регистрирующие блоки, отличающееся те.м, что, с целью повыщенля точности, оно снабжено датчиками определевия положения осей автосцепок объектов, находящихся на платформе, установленными у платформы на уровне головок автосцепок объектов, и датч:иком измерения п родольных горизонтальных усилий, действующих на платформу при прохождении по ней объекта, устаиовленным в продольной горизонтальной тяге, связанной шарнирно с платформой и фундаментом, подключенными на вход аналого-цифрового преобразователя через вьгчислительные л преобразующие блоки.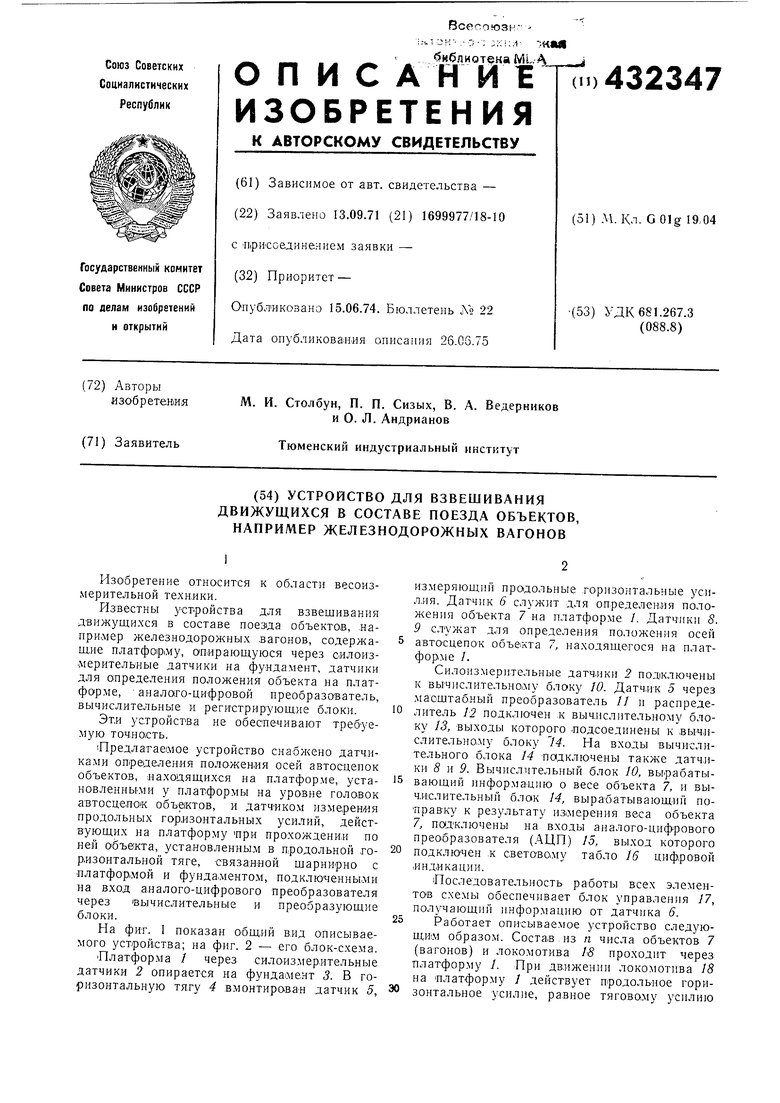

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для взвешивания подвижных объектов | 1987 |
|
SU1432341A1 |
| ВАГОННЫЕ ВЕСЫ ШИС | 1994 |
|
RU2082112C1 |
| Устройство для взвешивания железнодорожных вагонов в движении | 1987 |
|
SU1474475A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕРТИКАЛЬНЫХ СИЛ ВЗАИМОДЕЙСТВИЯ ДВУХ СЦЕПЛЕННЫХ ВАГОНОВ | 1971 |
|
SU427240A1 |
| Устройство для потележечного взвешивания железнодорожных вагонов в движении | 1984 |
|
SU1174771A1 |
| Устройство для автоматического поосного взвешивания объектов | 1983 |
|
SU1154544A1 |
| Устройство для взвешивания вагонов в движении | 1981 |
|
SU1065693A1 |
| Устройство управления дозированной загрузкой железнодорожных вагонов | 1987 |
|
SU1422017A1 |
| Трехкомпонентные платформенные весы | 1975 |
|
SU547646A2 |
| Способ взвешивания подвижных объектов | 1986 |
|
SU1453179A1 |