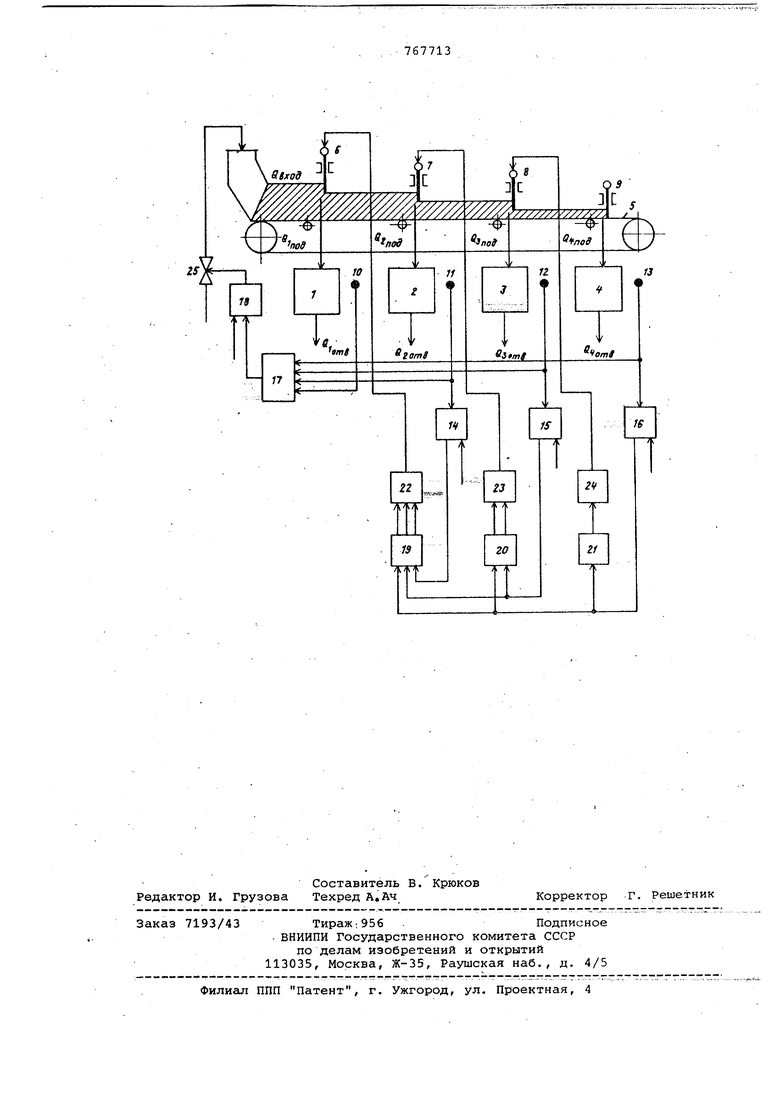
некоторый угол, датчики 10-13 уровня, установленные в аппаратах 1-4 и подсоединенные к входам соответствую щих блоков 14, 15, 16 управления и к входам сумматора 17 нагрузок, регулятор 18 общей координаты управления цепочки из последовательно соединенных блоков 19 f. 20, 21 перестройки коэффициентов, и сумматоров 22, 23, 24. Выходы сумматоров 22, 23, 24 под ключены ко входам соответствующих ис полнительных механизмов 6, 7, 8, вхо ды блоков 19, 20, 21 перестройки коэффициентов - к выходам последующих блоков 14, 15, 16 управления, а выход сумматора 17 нагрузок подсоедине через регулятбр 18 общей координаты управления ко входу исполнительного механизма 25, установленного на входе транспортера 5. Устройство работает следующим образом., К аппаратам 1-4 транспортером 5 подается входной поток Q .д материа ла, например щелочной целлюлозы. Исполнительньми механизмами 6-9 этот поток делится на части , 1,2,3,4. Датчиками 10-13 уровня измеряются уровни в аппаратах 1-4, а сигналы, пропорциональные уровням/ поступают на сбответствуюц|(ие блоки 14, 15, 16 управления и сумматор 17 нагрузок. В случае возмущения по одной из отводимых частей, например по аппарате 3 начнет изменяться уровень. Сигнал с датчика 12 уровня поступает на вход блока 15 управления, который одновременно изменяет положение исполнительных механизмов 6 и 7 до тех пор, пока уровень в аппарате 3 не станет равным заданному. При этом с помощью блоков 19 и 20 пе рестройки коэффициентов и сумматоров 22 и 23 обеспечивается согласованность движения исполнительных механизмов 6 и 7 таким образом, что под.водящий поток Q2noA остался постоянным за счет изменения потока QinoA. Аналогичным образом, за счет потока QinoA происходит компенсация воз мущений по 2ffiz- Поскольку аппараты 1-4 представляют собой объект без самовыравнивания, изменение О.по приводит к изменению суммарного уровня и пропорционального ему сигнала с выхода сумматора 17 нагрузок. Регулятор 18 общей координаты управления с помощью исполнительного механизма 25 отрабатывает рассогласование, изменяя входной поток йвхол ДО тех пор, пока суммарный уровень не станет равным заданному. Таким образом, достигается автономность регулирования уровней в каждом из аппаратов, загружаемых с одного транспортера с повышенной точностью. Формула изобретения Устройство для дозирования материала в аппараты,загружаемые с одного транспортера, содержащее по числу аппаратов исполнительные механизмы и датчики уровня, установленные в аппаратах и подсоединенные к входам соответствующих блоков управления И к входам сумматора нагрузок, а такг же регулятор общей координаты управления и исполнительный механизм, установленный на входе транспорте.-а , отличающееся тем, чт.,-, с целью повышения точности устройства, в него введены цепочки из последовательно соединенных блоков перестройки коэффициентов и сумматоров, причем выходы сумматоров подключены ко входам соответствующих исполнительных механизмов, входы блоков перестройки коэффициентов подключены к выходам последующих блоков управления, а выход сумматора нагрузок подключен через регулятор общей координаты управления ко входу исполнительного механизма, установленного на входе транспортера. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 249449, кл. G 05 В 11/01, 1966. 2.Минскер И.Н. Оперативное управление химико-технологическими комплексами. М., Химия, 1972, с. 193, рис. 65 (прототип).