блок выделения низкой частоты вращения снабжен дополнительным выходом, блок задания напряжения выполнен с переменной уставкой и снабжен управляющим входом и введены блок выдержки времени с двумя выходами , и переключатель с управляющим входом и дйумя информационными входами, связанными соответственно с датчиком напряжения и первым из. упомянутых
датчиков тока, выход переключателя соединен с первым входом первого блока сравнения, а управляющий вход переключателя - с первым выходом блока выдержки времени, входом подключенного к дополнительному выходу блока выделения низкой частоты вращения, а второй выход блока выдержки времени соединен с управляющим входом блока задания напряжения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Частотно-регулируемый электропривод | 1983 |
|
SU1112522A1 |
| Устройство для определения характеристик гистерезисного электропривода | 1984 |
|
SU1251276A1 |
| Способ пуска группы синхронных гистерезисных электродвигателей | 1986 |
|
SU1387151A1 |
| Частотнорегулируемый электропривод | 1978 |
|
SU767927A1 |
| Способ пуска двух групп гистерезисных электродвигателей | 1989 |
|
SU1758816A1 |
| Система электропитания и управления группами гистерезисных электродвигателей | 1984 |
|
SU1241339A1 |
| Электропривод с гистерезисным электродвигателем | 1972 |
|
SU530407A1 |
| Устройство управления электроприводом | 1983 |
|
SU1161920A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 1993 |
|
RU2085018C1 |
| Устройство для управления частотно-регулируемым многодвигательным электроприводом | 1984 |
|
SU1252906A1 |
1. МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД, содержащий N гистерезисных электродвигателей, преобразователь частоты, составленный из регуляторов частоты и напряжения и усилителя мощности, В.ХОДЫ которого связаны с выходами регуляторов частоты и напряжения соответственно, а выход - с гистерезисными электродвигателями, блок задания тока и датчик тока, блок задания напряжения и датчик напряжения, блок задания частоты и два блока сравнения, отличающийся тем, что, с целью повьшения КПД путем снижения потерь в пусковом и рабочем режимах, один из N гистерезисных электродвигателей снабжен датчиком частоты вращения и в цепи питания указанного электродвигателя установлен датчик тока, а датчик напряжения включен в цепь питания И -1 гистерезисных электродвигателей, и введены блок выделения низкой частоты вращения с двумя входами, блок регулирования скольжения и сумматор частот с двумя входами, причем выход датчика тока связан с первым входом первого блока сравнения, а выход датчика напряжения - с первым входом второго блока сравнения, второй вход которого подключен к блоку задания напряж,ения, а выход через блок задания тока связан с вторым входом первого блока сравнения, выходом соединенного с регулятором напряжения, один вход сумматора частот подключен к выходу тахогенератора, второй вход сумматора частот связан с выходом блока регулирования скольжения, входом соединенного с выходом тахогенератора, выход сумматора частот подключен к одному входу блока выделения низкой частоты вращения, второй вход которого соединен с блоком задания частоты вращения, а выход - с входом регулятора частоты. 2.Электропривод по п. 1, о т л ичающийся тем, что, с целью повышения устойчивости, в него введены блок суммирования с двумя входами, включенный по первому входу и выходу между блоком регулирования скольжения и вторым входом сумматора частот, и последовательно соединенные между собой второй датчик тока, установленный в цепь питания М -1 гистерезисных электродвигателей, фильтр низких частот, фазосдвигающий блок, выходом соединенный с вторым входом блока суммирования. 3.Электропривод по пп. 1 и 2, отличающийся тем, что
Изобретение относится к электротехнике и может быть использовано в многодвигательных установках с общим числом электродвигателей от двух до десяти тысяч и более, например, в инерционном приводе центрифуг, гироскопов и т.д. Известен многодвигательный электр привод, содержащий гистерезисные электродвигатели, подключенные к преобразователю частоты, состоящему из инвертора йапряжения и выпрямителя напряжения сети, которые соединены между собой LC-фильтром. Для компенсации реактивной энергии на выход преобразователя частоты подключены .конденсаторы. Схема управления содер жит блоки регулирования напряжения и частоты, датчики, напряжения, при этом выход последних через измерител ньй выпрямитель и пороговьш элемент соединен с блоком регулирования напряжения. Выход измерительного выпря мителя через блок задания формы напряжения соединен с сумматором, вто рой вход которого соединен с задатчиком частоты, а выход сумматора свя зан с блоком регулирования частоты преобразователя L13. Наиболее близким к изобретению яв ляется многодвигательный электропривод, содержащий Ыгистерезисных электродвигателей, преобразователь частоты составленный из регуляторов частоты и напряжения и усилителя мощности, входы, которого соединены соответстве но с выходами регуляторов частоты и напряжения, а выход усилителя мощнос ти подключен к N -1 гистерезлсным электродвигателям. Регулятор напряжения выполнен в виде выпрямителя, а регулятор частоты - в виде инвертора, выполняющего функцию и усилителя мощности. Выпрямитель и инвертор соединены между собой через RC-фильтр. Дополнительно к вькоду инвертора напряжения подключены конденсаторы для компенсаций реактивной мощности. Электропривод содержит блок задания тока и датчик тока, блок задания напряжения и датчик напряжения, три блока сравнения и блок зада1|ия частоты вращения, причем выходы датчиков тока и напряжения, установленные на выходе инвертора, через блок умножения и нелинейный блок связаны с соответствующим входом первого блока сравнения, к другому входу которого подключен задатчик напряжения, выход первого блока сравнения через первый пропорциональный регулятор, второй блок сравнения, второй пропорциональный регулятор, третий блок сравнения и третий пропорциональный регулятор соединен с выпрямителем. Вторые входы второго и третьего блоков сравнения соединены соответственно с датчиком напряжения, установленным на выходе LC-фильтра, и датчиком тока, включенным в цепь питания выпрямителя. Электропривод содержит также блок управления частотой, в состав которого входит блок задания частоты вращения, и обеспечивает ступенчатое регулирование частоты и напряжения, осзацествляя тем самым частотно-регулируемый запуск, а в рабочем рех(име стабилизацию основных параметров электродвигателей CZ1. 3 Однако в известных устройствах дискретность регулирования частоты и напряжения не позволяет осуществля запуск с мнниьсумом потерь скольжения в электродвигателях, увеличивается время запуска, поскольку переход с о ной ступени частоты вращения на друг сопровождается большой выдержкой времени, необходимой для синхронизации отстающих электродвигателей, что снижает КПД электропривода. Компенсация энергии на зажимах инвертора не исключает циркуляции больших реактивных токов в цепях электродвигатель - компенсатор, что вызьшает потери энергии, компенсируемые за счет потребления активной энергии из сети, поэтому КПД рабочего режима также мал. Устойчивость системы во многом оп-го ния
ределяется соотношениями реактивных сопротивлений -в системе компенсатор группа электродвигателей. Изменение эквивалентных реактивных сопротивлений в пуске по мере разгона разных электродвигателей при. неизменных параметрах конденсаторов снижает устойчивость системы. Аналогичное явление имеет место при выключении части электродвигателей в рабочем режиме или при изменении режима их работы и т.д.
Цель изобретения - повьшзение КПД путем снижения потерь в пусковом и рабочем режимах и повышение устойчивости. Поставленная цель достигается тем, что в многодвигательном электро приводе, содержащем N гистерезисных электродвигателей, преобразователь частоты, составленный из регуляторов частоты и напряжения и усилителя мощ ности, входы которого связаны с выходами регуляторов частоты и напряжения соответственно, а выход с гистерезисными электродвигателями, блок задания тока и датчик тока, блок задания напряжения и датчик напряжения, блок задания частоты вращения и два блока сравнения, один из W гистерезистых электродвигателей снабжен датчиком частоты вращения и в цепи питания указанного гистерезистого электродвигателя установ лен датчик тока, а датчик напряжения включен в цепи питания N -1 гистерезисных электродвигателей, и введены блок выделения низкой частовход которого соединен с блоком задания частоты врдщения, а выход с входом регулятора частоты.
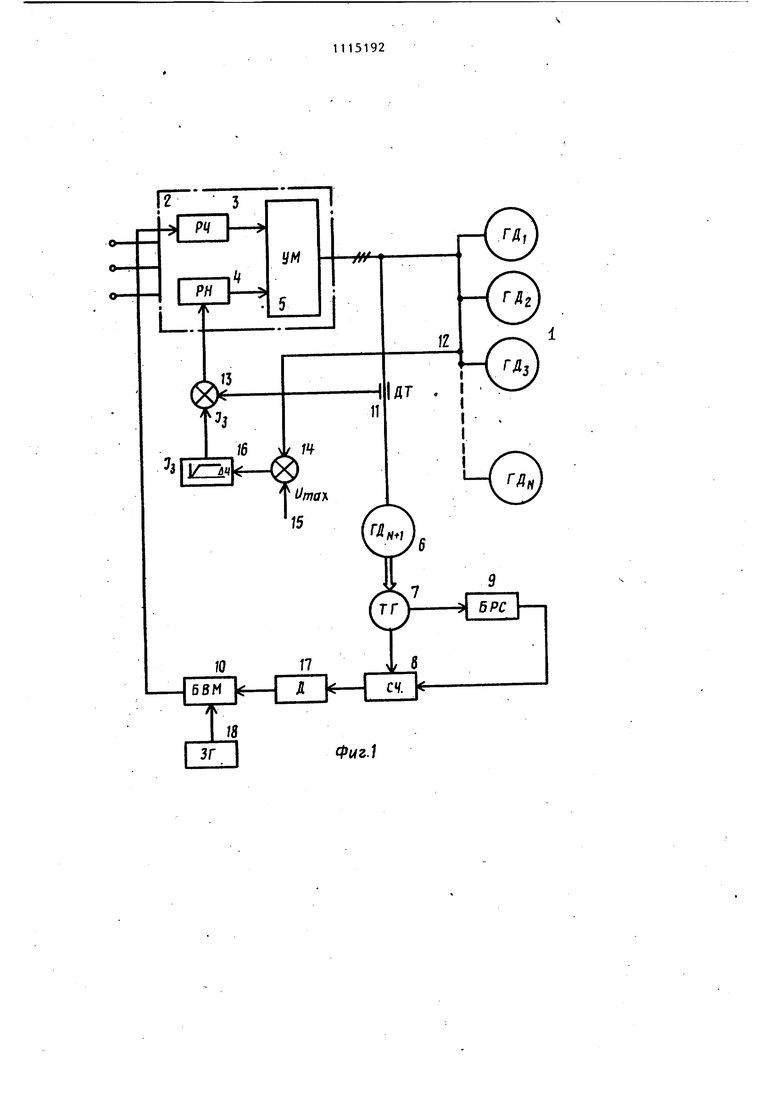
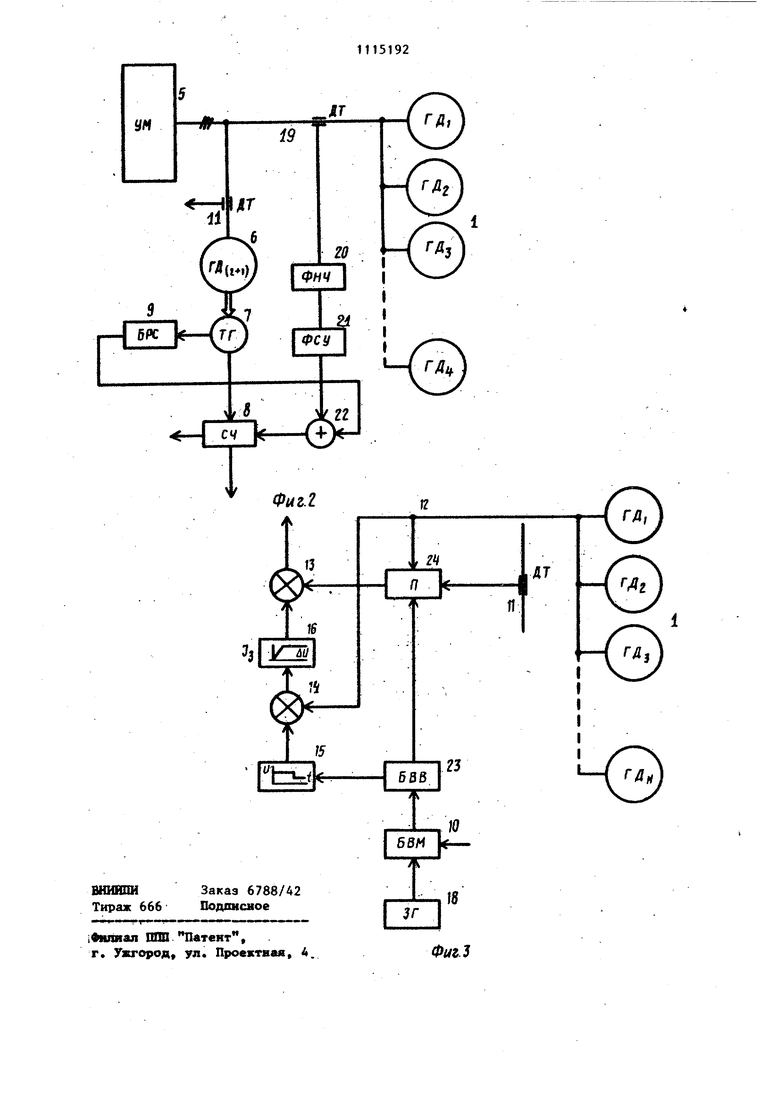
Кроме того, введены блок суммирования с двумя входами, включенный по первому входу и выходу между блоком регулирования скольжения и вторым входом сумматора частот, и последовательно соединенные между собой второй датчик тока, установленный в цепи питания N-1 гистерезисных электродвигателей, фильтр низких частот, фазосдвигающий блок, выходом соединенный с вторым входом блока 92 ты вращения с двумя входами, блок регулирования скольжения и сумматор частот с двумя входами, причем выход датчика тока связан с первым входом первого блока сравнения, а выход датчика напряжения - с первым входом второго блока сравнения, второй вход которого подключен к блоку задания напряжения, а выход через блок задйния тока связан с вторым входом первого блока сравнения, выходом соединенного с регулятором напряжения, один вход сумматора частот подключе к выходу тахогенератора, второй вход сумматора частот связан с выходоь4 блока регулирования скольжения, входом соединенного с выходом тахогенератора, выход сумматора частот подключен к одному входу блока вьщеленизкой частоты вращения, второй суммирования Блок вьщеления низкой частоты вращения снабжен дополнительным выходом, блок задания напряжения выполнен с переменной уставкой и снабжен управляющим входом и введены блок выдержки времени с двумя входами, и переключатель с управляющим входом и двумя информационными входами, связанными соответственно с датчиком напряжения и первым из упомянутых датчиков тока, выход переключателя соединен с первым входом первого блока сравнения, а управляющий вход переключателя - с первым BEJXO- дом блока вьдержки времени, входом подключенного к дополнительному выходу блока выделения низкой частоты вращения, а второй выход блока выдержки времени соединен с управляющим входом блока задания напряжения. На фиг. 1 представлена блой-схема многодвигательного электропривода; на фиг. 2 и 3 - варианты выполнения многодвигательного электропривода. $1 Многодвигательный электропривод содержит N гистерезисных электродви гате,лей 1, преобразователь 2 частоты составленный из регулятора 3 частоты регулятора 4 напряжения и усилителя мощности, входы которого соединены с выходами регуляторов частоты и напряжения, а выход - с гистерезисными электродвигателями. Гистерезисный электродвигатель 6 снабжен тахогенератором 7 и в электропривод введены сумматор 8 частот с двумя входами, блок 9 регулирования скольжения и 10 выделения низкой частоты вра щения с двумя входами. В цепи питания гистерезисного электродвигателя 6 установлен датчик 11 тока, в цепь питания гистерезисЛых электродвигателей 1 включен датчик 12 напряжения Выход датчика 11 тока связан с первым входом первого блока 13 сравнения, а выход датчика 12 напряжения с первым входом второго блока 14 сравнения, второй вход которого подключен к блоку 15 задания напряжения Выход второго блока 14 сравнения через блок 16 задания тока связан с вторым входом первого блока 13 сравнения, выходом соединенного с регуля тором 4 напряжения. Один вход сумматора 8 частот подключен к выходу тахогенератора 7, второй вход связан с выходом блока 9 регулирования скол жения, входом соединенного с выходом тахргенератора 7, а выход пoдклfoчeн через делитель 17 частоты к одному входу блока 10 выделения низкой частоты вращения, второй вход которого соединен с блоком 18 задания частоты вращения, а выход - с входом регулятора 3 частоты. В многодвигательный электропривод могут быть введены последовательно соединенные между собой второй датчи 19 тока (фиг, 2), установленный в цепи питания гистерезисных электродвигателей 1, фильтр 20 низких часто и фазосдвигающий блок 21, выход кото рого подключен к второму входу блока 22 суммирования, включенному по первому входу и выходу между блоком 9 регулирования скольжения и вторым входом сумматора 8 частот. Кроме того, в электроприводе блок 10 вьщеления низкой частоты вращения может быть снабжен дополнительным выходом, блок 15 задания напряжения выполнен с перемен 1ой ус2тавкой и снабжен управляющим входом, и введены блок 23 вьщержки времени (фиг. 3) и переключатель 24 с управляющим входом и двумя информационными входами, один из которых связан с датчиком 12 напряжения, другой - с датчиком 11 тока. Выход переключателя соединен с первым входом первого блока 13 сравнения, а управляющий вход переключателя - с выходом блока 23 выдержки времени, входом подключенного к дополнительному выходу блокЛ 10 выделения низкой частоты вращения. Второй выход блока 23 выдержки времени подключен к управляющему входу блока 15 задания напряжения. Выполнение отдельных элементов схемы может быть различно. Сумматор 8 частот может быть аналоговым или импульсным в зависимости от тока тахогенератора 7. В последнем случае при следовании импульсов произвольной частоты возникает проблема обеспечения равномерности. Она достигается путем повышения собственной частоты тахогенератора 7, блока 9 регулирования скольжения с последующим делением в делителе 17 частоты,, а также применением специальных схем сдвига последовательностей импульсов. При аналоговом выполнении сумматор частот должен содержать преобразователь напряжение - частота. Блок 9 регулирования скольжения в простейшем случае обеспечивает неизменную величину скольжения, а в более сложной реализации - сложную функцию, учитывающую изменение механической характеристики гистерезистого электродвигателя на разной частоте питания, Блок 16 задания тока имеет ограничение по максимуму и пропорциональное снижение задания тока при приближении .напряжения на зажимах гистерезисных электродвигателей 1 к предельному значению на данной частоте вращения . Блок .10 выделения низкой частоты вращения осуществляет управление регулятором 3 частоты от сумматора 8 частот и стабильного блока 18 задания частоты вращения, если период импульсов, задаваем 1х сумматором 8 частот, становится меньше периода импульсов блока 18 задания частоты вращения. Устройство работает следуюищм образом. В начальный момент запуска, когда отсутствует вращение гистерезисных электродвигателей 1 и 6, исходную частоту коммутации преобразователя 2 частоты задает блок 9 регулировакия скольжения. Величина абсолютног скольжения Ji невелика и составляет обычно не более 50 Ги (зависит от особенностей механической характерис тики электродвигателей 1 и 6). Блок 16 задания тока задает ток на уровне максимально допустимого значения для электродвигателя 6. За счет наличия обратной связи по цепи питания элект родвигателя 6 на выходе преобразователя 2 частоты устанавливается напря жение, соответствующее этому предель ному току. Электродвигатели 1 и 6 однотипны, при этом момент инерции ротора элект родвигателя 6 равен или несколько больше момента инерции любого из электродвигателей 1. В электромагнит ном отношении электродвигатель 6 не должен иметь соотношение электромагнитный момент - ток выше, чем любой средний по этому показателю электродвигатель 1. В этих условиях уровень задаваемого на выходе преобразователя 2 частоты напряжения обеспечивает пусковой момент каждого из элек . родвигателей 1 на уровне пускового момента электродвигателя 6. По мере увеличения частоты вращения электродвигателя 6 увеличивается сигнал тахогенератора 7 и растет час тота fg на выходе сумматора.8 частот которая равна fg К f вр + fg К„. Делитель 17 частоты и блоки управления регулятором 3 частоты выбираются из условия получения частоты на выходе преобразователя 2 частоты, рав- , f ной f 5 при уровне входi , т- 1.1 ной частоты f (fS - абсолютная частота скольжения; ййр,р - частота вращения электродвигателя 6). В результате образуется положительная обратная связь по скорости при сохранении постоянства скольжения ведущего электродвигателя 6. Отрицательная обратная связь по току обеспечивает его стабилизацию за счет изменения (роста) напряжения при изменении (росте) частоты вращения. Постоянство тока и скольжения обеспе чивает регулирование практически с неизменным уровнем потока. Электродвигатели 1 изменяют свою частоту вращения под действием изменения частоты питания и напряжения на зажимах ЭJiгктpoдвигaтeлeй в уело- ВИЯХ постоянства потока на каждом из них, так как соотношение напряжение - частота задается и контролируется электродвигателем 6. По отношению к источнику питания (преобразователь 2 частоты) группа электродвигателей 1 работает как от источника напряжения . Блок сравнения контролирует напряжение на зажимах электродвигателей. При достижении предельного значения, выбранного из условий работы либо преобразователя частоты, либо электродвигателей, автоматически уменьшается сигнал задания тока в блоке 16 задания тока и уменьшается ток. Наступает стабилизация напряжения, а разгоно электродвигателей продолжается в условиях стабилизации напряжения на предельном уровне. По достижении частотой на выходе сумматора 8 частот величины, задаваемой блоком В задания частоты, осуществляется переключение канала регулирования частоты на режим стабилизации частоты. Все электродвигатели продолжают разгоняться, постепенно уменьшая свое скольжение, и входят в синхронизм. В описанном запуске имеет место эффект самовыравнивания электродвигателей за счет индивидуального выбора электродвигателями величины абсолютного скольжения и тока нагрузки в зависимости от уровня текущего момента статической нагрузки на валу каждого из них и разброса электромагнитных соотношений. Это связано с тем, что гистерезисные электродвигатели в области низких скольжений имеют падающую механическую характеристику, подобную асинхронным электрвдвигателям. Выбором частоты скольжения электродвигателя 6 на среднем участке этой части механической характеристики обеспечивается режим самовьфавнивания. Более нагруженные электродвигатели работают с несколько большим скольжением, но и с большим моментом (током), а менее нагруженные - наоборот. Б результате все они успевают отследить темп изменения частоты, задаваемой электродвигателем 6.
91
Наличие обратной связи по напряжению исключает чрезмерное насьпцение электродвигателей и ограничивает предельное значение тока в области больших частот вращения. Использование блока, 9 регулирования скольжения позволяет йводить коррекцию в величину Скольжения в зависимости от особенностей механической характеристики электродвигателей.
В электроприводе обеспечивается повышение устойчивости за счет ввода корректирующего сигнала по частоте скольжения в функции изменения общего тока электродвигателей 1. Для этого датчик 19 тока (фиг. 2) измеряет общий ток, фильтр 20 низких частот вьщеляет изменение этого тока, вызванное низкочастотными колебаниями момента, и через фазосдвигающий блок 21 изменяет частоту задаваемого сколь жения путем суммирования в блоке 22 суммирования сигналов блока 9 регулирования скольжения и фазосдвигающего блока 21. Низкочастотные колебания тока (мощности), которые возникают в цепи преобразователь 2 частоты электродвигатели 1, гасятся путем изменения величины скольжения, приводящего к соответствующему изменению момента и потребляемой мощности электродвигателей 1.
В многодвигательном электроприводе обеспечивается переход на рабочий режим с одновременньм перевозбуждением электродвигателей, что обеспечивает высокий КПД рабочего режима. Для этого в момент перехода на режим стабилизации частоты блок 10 выделения низкой частоты вращения формиру519210
ет сигнал, который через .блок 23 выдержки времени изменяет режим работы регулятора напряжения. Выдержка времени необходима для ввода в синхро5 низм всех электродвигателей, поскольку в момент синхронизации частота их вращения отличалась от синхронной на частоту скольжения. Переключатель 24 обеспечивает перевод электропривода
o на режим стабилизации напряжения,
а блок 15 задания напряжения понижает уровень задания напряжения. За счет этого обеспечивается перевозбуждение и повышается КПД электродвигателей
5 в 1,2-3 раза в зависимости от особенностей выполнения электродвигателей.
Таким образом, в электроприводе обеспечивается формирование идеальной механической характеристики с
0 моментом, независящим от частоты
для каждого из N гистерезисньпс электродвигателей, что позволяет снизить время их разгона, при этом частота скольжения всех электродвигателей
5 не превышает величину скольжения ведущего электродвигателя, что снижает потери скольжения и повышает КПД запуска.
Использование обратной связи по
0 колебанию общего тока с воздействием на частоту, питания путем изменения частоты скольжения позволяет повысить устойчивость всей системы в пусковом режиме.
Понижение напряжения в рабочем режиме и изменение структуры обратной связи обеспечивает режим перевозбуждения гистерезисных электродвигателей с резким повышением КПД рабочего режима.
fe--r
p- РЧ I-
C
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО ДЛЯ ТЕМПЕРИРОВАНИЯ ИЗДЕЛИЙ И СПОСОБ УПРАВЛЕНИЯ УСТРОЙСТВОМ ДЛЯ ТЕМПЕРИРОВАНИЯ ИЗДЕЛИЙ | 2016 |
|
RU2726534C2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Bagemiel Peter, Golde Ernst, Маа Karl | |||
| Umricht-er fur Zentrifupenantriebe zur Urananreicherunp.- Techn | |||
| Mitt AEC - Telefunken, 1977, 1, c | |||
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
