информационному входу второго усилителя, управляющий вход которого соединен с одним выходом второго задатчика коэффициента усиления, подключенного входом ко второму выходу импульсного преобразователя и другим выходом через элемент задержки - к одному входу накопителя,другой вход которого через второй сумматор соединен с выходами усилителей. Выходы второго сумматора и первого усилителя подключены к другим входам компаратора.
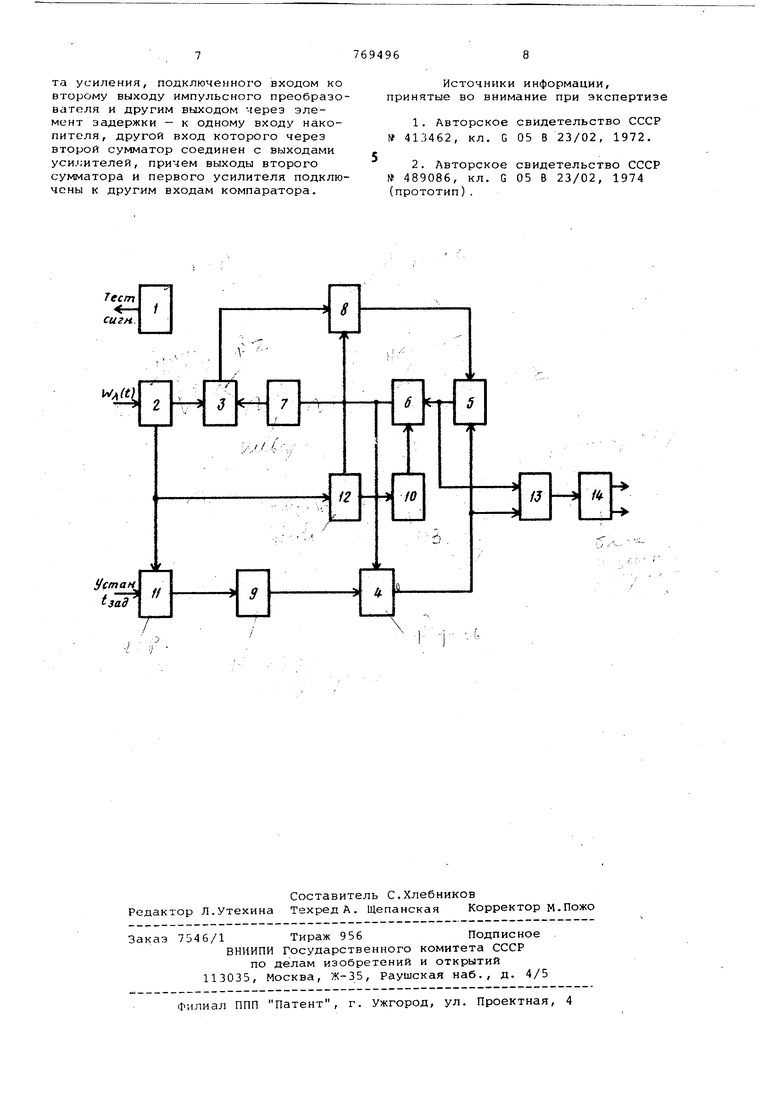
На чертеже показана функциональная схема устройства.
( Устройство содержит генератор тес,сигналов 1, импульсный преобразователь 2, первый сумматор 3, первый усилитель 4, второй сумматор 5 и 4, накопитель б, инвертор 7, второй усилитель 8, первый задатчик коэффициентов усиления 9, элемент задержки 10, генератор последовательности импульсов 11, второй задатчик коэффициента усиления 12, компаратор 13 и блок оценки результатов контроля 14.
Следует рассмотреть совокупность устройств bf,} , f- 1 ,..,n (л 1,...,) где п - число устройств, входящих в состав объекта контроля, Т - устройство под номером Л..
Состояние каждого устройства характеризуется значением соответствующего параметра, которое обозначим через Vj . При этом пределы изменений значений каждого параметра известны (, а ) . Тогда состояние объекта контроля в произвольный момент времени можно математически определить П-мерным вектором - столбцом.
,..
элементы которого равны значениям соответствующих параметров, Т - oneрация транспортирования вектора. Пусть R,.n - мерное векторное пространство. Конец вектора W в любой момент времени может принадлежать одной из точек пространства RVX/. В силу условий (-а.а) вектор V может принимать лишь конечное множество значений из пространства . Множество возможных значений вектора обозначается через NV, а множество значений вектораW, отвечающих состоянию работоспособности объекта контроля, через Npx. Множество является подмножеством множествам, т.е. , .
Установление факта принадлежности конца вектора W в любой момент времени одному из подмножеств или Np осуществляется с помощью блока оценки результатов контроля 14.
На основе известной модели объекта контроля, представленной, например, в виде
W() T(Ktl,K)W(lC)-tr,(,K)x(lC),(l,K)w(n) где V/ - векто р состояния;
X - вектор сигнала стимулирующего генератора;
U). - вектор случайного возмущения (имеющего мест в объекте контроля); ki 0,1,...- дискретное время;
ф - переходная матрица состояния;
- - переходная матрица входа;
Гг, - переходная матрица возмущения ;
устройство реализует процесс получения текущих и предсказанных значений оценок. Оптимальная (в смысле среднеквадратичного кри герия) текущая оценка состояния W(.+ l) описывается рекуррентным соотношением
N(lC+l/ n {K l,K)(K/K.)t
K()tw(K+l)-$()4A/(K/K) для к. 0,1, . . . ,
где V (0/0)0,K(V+1) - матрица передачи.
Предсказанное значение оценки состояния объекта контроля на несколько шагов вперед, например на 6 шагов, имеет вид w()«t(K.t,K)w(K/K)
Устройство работает следующим образом.
Стимулирукяцее воздействие с выхода генератора 1 подается на вход объекта контроля. На выходе последнего появляется случайный вектор состояния W(t , по которому в устройстве производится определение значений W(Vi+l/K+l) и предсказанной W(K+6/K) оценок.
В связи с этим следует рассмотреть два режима работы устройства.
1) Режим определения текущей оценки Л (К+1/К+1).
Работа начинается с нулевого значения оценки NA/J(О/О) 0 (в накопителе 6 - нулевое значение оценки). В момент К О по приходе на вход импульсного преобразователя 2 случайного значения сигнала ) (в данном случае, при К (1)) длительностью, обеспечивающей нормальное срабатывание элементов схемы устройства, и амплитудой, соответствующей значению ) в момент Х О сигнал W() с одного из выходов преобразователя 2 поступает на входы второг задатчика коэффициента усиления 12 и генератора последовательности импульсов 11, ас другого выхода на певый вход сумматора 3. Второй задатчик коэффициента усиления 12 обеспечивает установку коэффициента усиления К(К+1) при О, Xji. (1) усилителя 8 и управление сбросом накопителя 6 старой оценки через элемент задержки 10, имеющий задержку на оди шаг (такт счета). Первый задатчик коэффициента усиления 9 с помощью генератора импульсов. 11 обеспэчивает установку коэффициента усиления ,i) , при к Оф(1,0). в этот момент времени при К О на вто ром входе сумматора 3 - сигнал W(0/0) 0. С выхода сумматора 3 си нал W(l), усиленный усилителем 8 в ) раз, пройдя через сумматор 5, поступает в накопитель 6 и компаратор 13, т.е. полученное значение оценки fj (1/1) передается в компаратор 13 и задерживается в накопителе 6, обеспечивающем выдачу сигнала (К/К) на вход усилителя 4 и чере инвертор 7 на вход сумматора 3. В момент К 1 поступившее с вы-хода преобразователя 2 на первый вход сумматора 3 значение сигнала W C/f+l) при 1W(2), суммируется с. сигналом W-xC 1/1) имеющимся на втором входе последнего. Полученная с выхода сумматора 3 невязка ЧС Ю-ЧС) .) в данном случае, при К 1 4W) 4().l.2,l)tl/l), усиленная усилителем 8 в iCjv (2) раз подается на первый вход сумматора 5 на второй вход которого поступает из накопителя 6 предыдущее значение оценки Wx(l/l), усиленное усилителем 4 в Ф (К +1,1) , при К 1 в Фх(2,1) раз. Полученное в результате суммирования указанных величин на выходе сумматора 5 текущее значение оценки состояния W()«i(Kn,i)Sv(K/К KJK+1) X (iC+i)-$(K+i,K)v;/(/IC) в данном случае, при Vt 1 w(:i/2) (7,i)w(i/i) V2)Lw(2)-V,i)(i передается в компаратор 13 и задерживается в накопителе 6. В дальнейшем (при К 2, 3 ...) описанный цикл повторяется. 2) рехсим предсказания на заданный интервал времени w(K--2/)) В этом режиме в соответствии с установкой заданного интервала предсказания (Установка .) в генераторе последовательности импульсов 11 последний с помощью первого задат чика коэффициента усиления 9 обеспечивает установку, коэффициента усиления усилителя 4 на величину ( что позволяет усиливать указанное число раз, обеспечивая тем самым выдачу через второй вход сумматора 5 на вход компаратора 13 предсказанного значения оценки на 6 шагов вперед a/(t/),)Ч(1с/х), т.е. на заданный интервал времени. В остальном работа устройства ан логична работе в первом режиме. Вычисленные значения оценок срав ниваются в компараторе 13 с соответ ствующими .значениями УПОР/ и по вели чине отклонения AVnop. блок оценки результатов контроля 14 выддает один из сигналов: Годен до t , т.е. на заданный интервал времени объект контроля годен или не годен. При контроле состояния динамической системы используются определенные при синтезе системы номинальные значения оценок и допустимые их отклонения ДУпое значения параметров , Г и1С. Технико-экономическая эффективность изобретения заключается в том, что устройство позволяет оценивать поведение контролируемых систем на заданный интервал времени, что расширяет область его применения и повышает точность работы. Величину ущерба вследствии отсутствия информации о поведении контролируемой динамической системы можно определить соотношением где Sj, - ущерб от I-той подсистемы; т - число подсистем. Опыт эксплуатации динамических систем показывает, что экономический эффект от внедрения предлагаемого устройства может составить до 5% от общей стоимости системы, а для некоторых систем - до 30%. Формула изобретения Устройство для контроля динамических систем, содержсодее 1:енератор тест-сигналов, подключенный к одному выходу устройства, и включенные последовательно компаратор, один вход которого соединен с первым входом устройства, и блок оценки результатов контроля, подключенный к другим выходам устройства, отличающееся тем, что, с целью расширения области применения и повышения точности работы устройства, оно содержит сумматоры, инвертор, накопитель, элемент задержки, усилители, задатчики коэффициентов усиления, импульсный преобразователь, вход и первый выход которого подключены соответственно ко второму входу устройства и одному входу первого сумматора, и генератор последовательности импульсов, соединенный входс1ми со вторым выходом импульсного преобразователя и третьим входом устройства, а выходом через первый задатчик коэффициента усиления с управляющим входом первого усилителя, информационный вход которого подключен к выходу накопителя и через инвертор к другому входу первого сумматора, подключенного выходом к информационному входу второго усилителя, управляющий вход которого соединен с одИим выходом второго эадатчика коэффициента усиления, подключенного входом ко второму выходу импульсного преобразователя и другим выходом через элемент задержки - к одному входу накопителя, другой вход которого через второй сумматор соединен с выходами уси.чителей, причем выходы второго сумматора и первого усилителя подключены к другим входам компаратора.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР 1 413462, кл. G 05 В 23/02, 1972.
2.Авторское свидетельство СССР 489086, кл. G 05 В 23/02, 1974 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля динамических систем | 1982 |
|
SU1034018A2 |
| Устройство для контроля системы управления | 1979 |
|
SU855612A1 |
| Устройство для контроля системы управления | 1981 |
|
SU1003029A2 |
| Устройство для контроля динамических систем | 1989 |
|
SU1615677A1 |
| Устройство для контроля объектов | 1990 |
|
SU1725233A1 |
| Устройство для контроля радиоэлектронных объектов | 1984 |
|
SU1205157A1 |
| Ультразвуковое устройство для измерения контактных давлений | 1990 |
|
SU1746297A1 |
| Устройство для контроля линейного объекта управления | 1989 |
|
SU1753454A1 |
| Устройство для контроля радиоэлектронных объектов | 1988 |
|
SU1524068A1 |
| Устройство для контроля радиоэлектронных объектов | 1990 |
|
SU1714622A1 |
