1
Изобретение относится к области автоматики и вычислительной техники и предназначено для использования в системах памяти и ввода-вывода с ленточным носителем.5
Известное устройство для стабилизации скорости ленточного носителя 1 не обладает достаточной точностью и надежностью при работе в старт-стопных и реверсивных режимах.10
Наиболее близким к изобретению техническим решением является устройство для стабилизации скорости ленточного носителя, содерл ащее электродвигатели, один из которых кинематически связан с наматыва- 15 ющим рулоном и одним датчиком оборотов, а другой - со сматывающим рулоном и друг.им датчиком оборотов, и включенные последовательно компаратор, усилитель мощности и иереключатель, выходы кото- 20 рого подключены к электродвигателям 2.
Однако точность и надежность работы такого устройства недостаточны из-за наличия потенциометров, износа трущихся поверхностей и других дестабилизирующих 25 факторов. Кроме того, устройство требует обязательного измерения радиуса намотки рулона.
Предложенное устройство отличается тем, что оно содержит две параллельные ЗО
цепи, состоящие из включенных последовательно частотного дискриминатора и функционального преобразователя, подключенный к их выходам сумматор, выход которого соединен с одним входом компаратора, и источник оиорного напряжения, подключенный к другому входу компаратора. Вход каждой из параллельных цепей соединен с выходом соответствующего датчика оборотов.
Это позволяет повысить точность и надежность работы устройства.
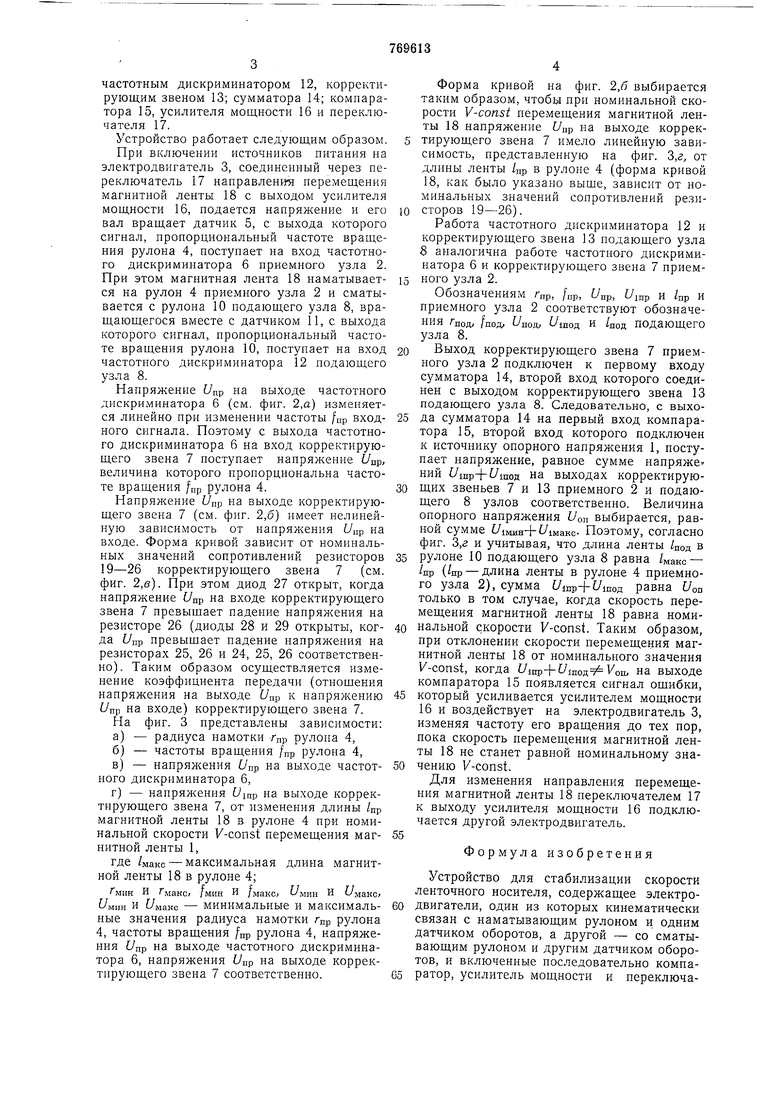
На фиг. 1 показана функциональная схема устройства; на фиг. 2а - статическая характеристика частотного дискриминатора; на фиг. 25 и 20 - соответственно статическая характеристика и прииципиальная схема функционального преобразователя (корректирующего звена); на фиг. 3 - диаграммы, иллюстрирующие работу устройства.
Устройство (фиг. 1) состоит из источника опорного напряжения f/on 1; приемного узла 2, образованного электродвигателем 3, наматывающим рулоном 4, датчиком оборотов 5, частотным дискриминатором 6, функциональным иреобразователем (корректирующим звеном) 7; подающего узла 8, образованного электродвигателем 9, сматывающим рулоном 10, датчиком оборотов 11,
частотным дискриминатором 12, корректирующим звеном 13; сумматора 14; компаратора 15, усилителя мощности 16 и переключателя 17.
Устройство работает следующим образом.
При включении источников иитания на электродвигатель 3, соединенный через переключатель 17 нанравленит перемещения магнитной ленты 18 с выходом усилителя мощности 16, подается напряжение и его вал вращает датчик 5, с выхода которого сигнал, пропорциональный частоте вращения рулона 4, поступает на вход частотного дискриминатора 6 приемного узла 2. При этом магнитная лента 18 наматывается на рулон 4 приемного узла 2 и сматывается с рулона 10 подающего узла 8, вращающегося вместе с датчиком И, с выхода которого сигнал, пропорциональный частоте вращения рулона 10, поступает на вход частотного дискриминатора 12 подающего узла 8.
Папряжение Lnp на выходе частотного дискриминатора 6 (см. фиг. 2,а) изменяется линейно при изменении частоты fnp входного сигнала. Поэтому с выхода частотного дискриминатора 6 на вход корректирующего звена 7 поступает напряжение L/np, величина которого пропорциональна частоте вращения /пр рулона 4.
Напряжение Цщ, на выходе корректирующего звена 7 (см. фиг. 2,6) имеет нелинейную зависимость от напряжения t/up на входе. Форма кривой зависит от номинальных значений сопротивлений резисторов 19-26 корректирующего звена 7 (см. фиг. 2,е). При этом диод 27 открыт, когда напряжение f/np на входе корректирующего звена 7 превыщает падение напряжения на резисторе 26 (диоды 28 и 29 открыты, когда f/np превыщает падение напряжения на резисторах 25, 26 и 24, 25, 26 соответственно). Таким образом осуществляется изменение коэффициента передачи (отношения напряжения на выходе f/np к напряжению Lnp на входе) корректирующего звена 7.
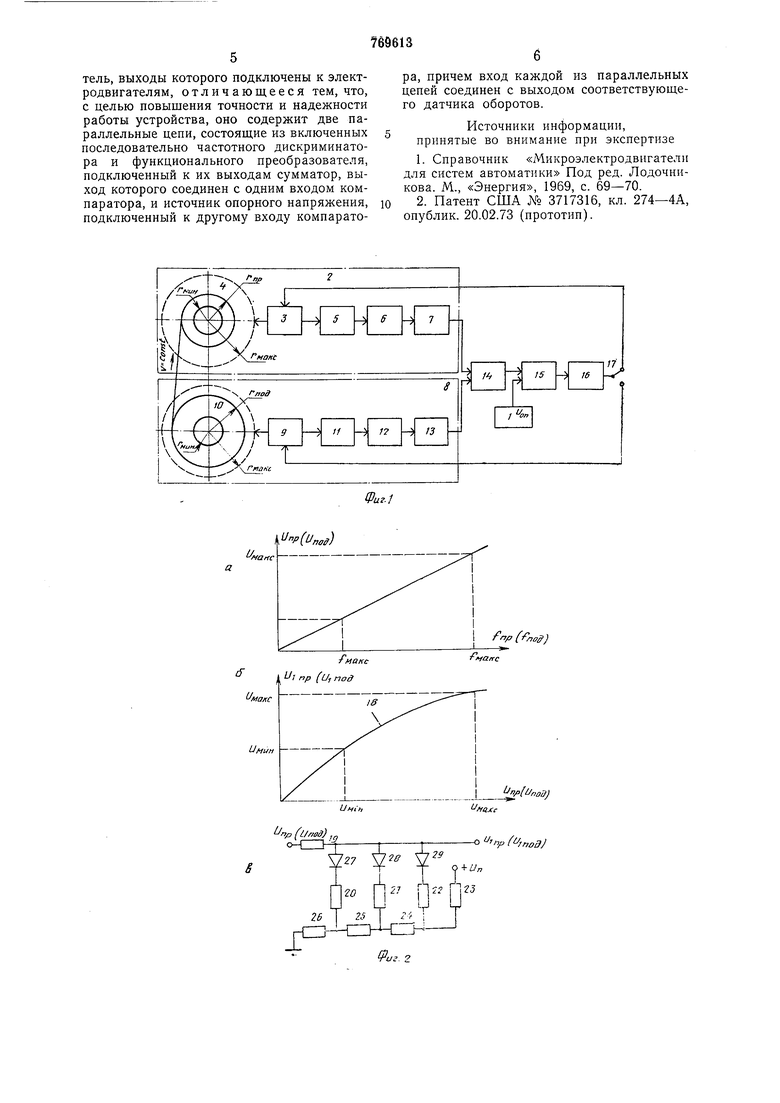
На фиг. 3 представлены зависимости:
а)- радиуса намотки Гпр рулона 4,
б)- частоты вращения /пр рулона 4,
в)- напряжения (Упр на выходе частотного дискриминатора 6,
г)- напряжения Ощр на выходе корректирующего звена 7, от изменения длины /пр магнитной ленты 18 в рулоне 4 нри номинальной скорости K-const перемещения магнитной ленты 1,
где /макс - максимальная длина магнитной ленты 18 в рулоне 4;
мин и Гмaкc /мин и /макс И (макс
мнн И /макс - минимальные И максимальные значения радиуса намотки Гщ рулона 4, частоты вращения /пр рулона 4, напряжения /пр на выходе частотного дискриминатора 6, напряжения f/np на выходе корректирующего звена 7 соответственно.
Форма кривой на фиг. 2,6 выбирается таким образом, чтобы при номинальной скорости V-const перемещения магнитной ленты 18 напряжение /пр на выходе корректирующего звена 7 имело линейную зависимость, представленную на фиг. 3,г, от длины ленты /пр в рулоне 4 (форма кривой 18, как было указано выше, зависит от номинальных значений сопротивлений резисторов 19-26).
Работа частотного дискриминатора 12 и корректирующего звена 13 подающего узла 8 аналогична работе частотного дискриминатора 6 и корректирующего звена 7 приемного узла 2.
Обозначениям Гпр, /пр, /пр, /шр и /пр и приемного узла 2 соответствуют обозначения Гпод /под, /под. /шод и /под подающего узла 8.
Выход корректирующего звена 7 приемного узла 2 подключен к первому входу сумматора 14, второй вход которого соединен с выходом корректирующего звена 13 подающего узла 8. Следовательно, с выхода сумматора 14 на первый вход компаратора 15, второй вход которого подключен к источнику опорного напряжения 1, поступает напряжение, равное сумме напряже НИИ /шр+ /1под на выходах корректирующих звеньев 7 н 13 приемного 2 и подающего 8 узлов соответственно. Величина опорного напряжения Uon выбирается, равной сумме /1МИН+ /1макс- Поэтому, согласно фиг. 3,г и учитывая, что длина ленты /под в рулоне 10 подающего узла 8 равна /макс - /пр (/пр - длина ленты в рулоне 4 приемного узла 2), сумма /1пр+ /шод равна Uoa только в том случае, когда скорость перемещения магнитной ленты 18 равна номинальной скорости V-const. Таким образом, при отклонении скорости перемещения магнитной ленты 18 от номинального значения F-const, когда /1пр+ 1под 7 Von, на выходе компаратора 15 появляется сигнал ошибки, который усиливается усилителем мощности 16 и воздействует на электродвигатель 3, изменяя частоту его вращения до тех пор, пока скорость перемещения магнитной ленты 18 не станет равной номинальному значению K-const.
Для изменения направления перемещения магнитной ленты 18 переключателем 17 к выходу усилителя мощности 16 подключается другой электродвигатель.
Формула изобретения
Устройство для стабилизации скорости ленточного носителя, содержащее электродвигатели, один из которых кинематически связан с наматывающим рулоном и одним датчиком оборотов, а другой - со сматывающим рулоном и другим датчиком оборотов, и включенные последовательно компаратор, усилитель мощности и переключатель, выходы которого подключены к электродвигателям, отличающееся тем, что, с целью повышения точности и надежности работы устройства, оно содержит две параллельные цепи, состоящие из включенных последовательно частотного дискриминатора и функционального преобразователя, подключенный к их выходам сумматор, выход которого соединен с одним входом компаратора, и источник опорного напряжения, подключенный к другому входу компаратора, причем вход каждой из параллельных цепей соединен с выходом соответствующего датчика оборотов.
Источники информации, принятые во внимание при экспертизе
1.Справочник «Микроэлектродвигатели для систем автоматики Под ред. Лодочникова. М., «Энергия, 1969, с. 69-70.
2.Патент США № 3717316, кл. 274-4А, опублик. 20.02.73 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического регулирования скорости перемещения магнитной ленты | 1975 |
|
SU533977A1 |
| Устройство для перемещения магнитной ленты | 1990 |
|
SU1705865A1 |
| Устройство для стабилизации скорости перемещения магнитной ленты | 1990 |
|
SU1753490A1 |
| Устройство для автоматического регулирования скорости магнитного носителя | 1974 |
|
SU493801A1 |
| Устройство для регулирования скорости лентопротяжного механизма | 1988 |
|
SU1501002A1 |
| Устройство для перемещения магнитной ленты | 1990 |
|
SU1697113A1 |
| Устройство для управления скоростью перемещения носителя магнитной записи | 1977 |
|
SU699563A1 |
| Аппарат магнитной записи | 1983 |
|
SU1081662A1 |
| Устройство для стабилизации скорости движения магнитного носителя | 1985 |
|
SU1237699A2 |
| Устройство для перемещения магнитной ленты | 1989 |
|
SU1670699A1 |
р(
о-I
S
/V (fnoff)
(ипоЗ)
мшао л / адлУ
769613
г
макс
(.fnod
гчаас
S
ниц
UnpiUmd)
UMHK
(U,no3)
и мин -
1накс
Inff (inod
-ii
I мак с
Lnp(i под)
L макс
1 L пр (i под)
