Изобретение относится к испытательной технике, используемой при подготовке к производству волоконных нитей, жгутов, тканей, а также изделий из них.
Известны способ и устройство определения вязкоупругих свойств комплексных нитей (см. авт.св. СССР N 1303885, кл. G 01 N 3/30 от 1986 г.), по которым испытуемый образец закрепляют в двух подвижных захватах.
Наиболее близким к предлагаемым изобретениям являются способ и устройство по авт.св. N 832415, кл. G 01 N 3/30 от 1979.
Согласно известному способу испытуемый образец закрепляют в подвижном и неподвижном соосных захватах и осуществляют импульсное силовое воздействие на подвижный захват.
Известное устройство содержит подвижный и неподвижный соосные захваты для закрепления испытуемого образца, силовой механизм для импульсного воздействия на подвижный захват, измерительные приборы.
Общим недостатком всех известных технических решений является следующее:
Трудность обеспечения достоверности контроля физико-механических свойств в метрологическом отношении многоволоконной системы (нити, жгута, ткани), заключающееся в следующем:
1) сложно надежно зафиксировать волоконную систему в захватах традиционного типа без "относительного" проскальзывания;
2) трудно учесть "внутренние" проскальзывания единичных фрагментов волокон при множественном разрушении нити;
3) сложно обеспечить идентичность закрепления нитей из волокон с различной физико-химической природой;
4) в условиях приложения динамических нагрузок необходимо устранять факторы возбуждения "случайных" колебаний системы, резко ухудшающих качество регистрации требуемых параметров свойств образцов;
5) весьма зауженный спектр характеристик свойств волокон, определяемых известными способами;
6) сложно идентифицировать закон нагружения в динамически нагружаемых образцах с законами нагружения, реализуемых, например, в традиционных статических методах испытаний волокон.
Техническая задача, решаемая изобретениями, заключается в устранении отмеченных недостатков, что обеспечит повышение информативности испытаний волокон и тканей.
Указанная техническая задача решается тем, что в способе скоростных ударных испытаний волоконных нитей, жгутов и тканей, по которому испытуемый образец закрепляют в подвижном и неподвижном соосных захватах и осуществляют импульсное силовое воздействие на подвижный захват, в соосных захватах закрепляют среднюю часть испытуемого образца, а его концы закрепляют в по крайней мере одном дополнительном неподвижном захвате, при этом смежные участки испытуемого образца, ограниченные захватами, располагают под углом друг к другу.
В устройстве для решения поставленной задачи используют конкретные конструкции захватов, позволяющие реализовать операции способа, при этом каждый из соосных захватов может включать в себя конический элемент и средства для фиксации испытуемого образца на внешнем торце конического элемента и его боковой поверхности, один дополнительный захват может быть выполнен с заостренными зажимными губками, а другой дополнительный захват может быть выполнен с плоскими зажимными губками.
При другом варианте каждый из соосных захватов включает в себя конический элемент с осевым отверстием и средства для фиксации испытуемого образца на внешнем торце конического элемента и его осевом отверстии.
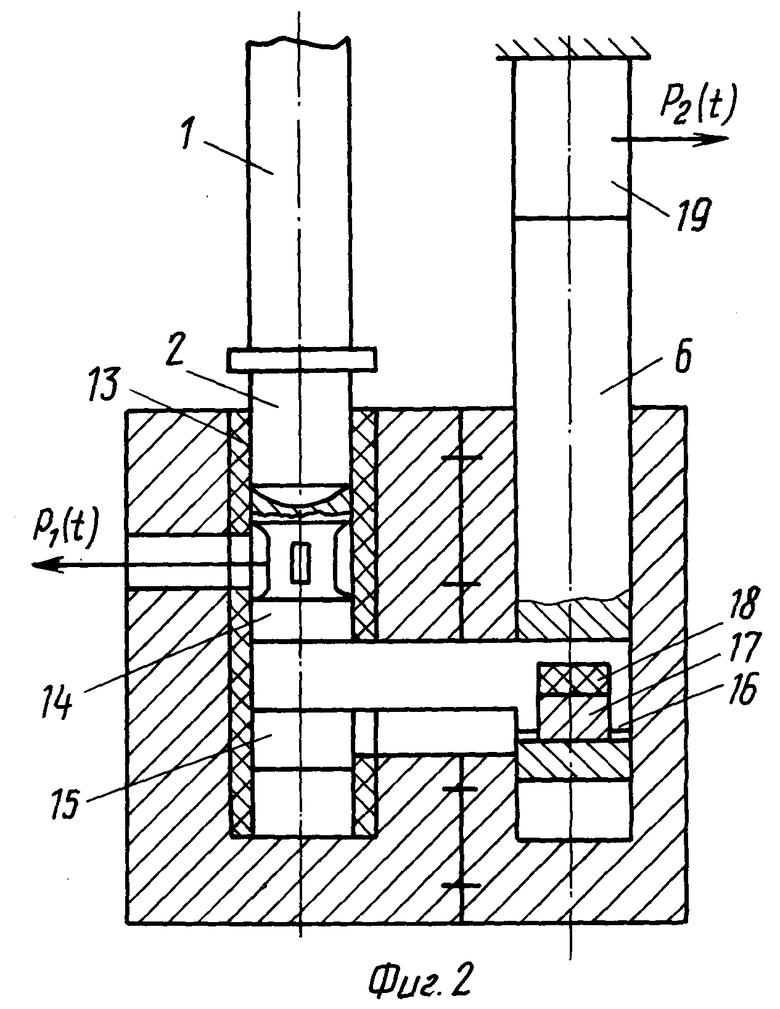
Механизм для импульсного сильного воздействия на подвижный захват включает в себя стержневой волноводный ударник, приемный пуансон и узел формирования нагружающего импульса с датчиком его контроля, который включает корпус с отверстием для размещения в нем упруго-эластичной направляющей втулки, охватывающей последовательно расположенные приемный пуансон, упругий динамометрический элемент с тензорезистором и инерционный элемент с кронштейном, связанным с элементом подвижного захвата через эластичный вкладыш.
Сопряжение приемного пуансона и упругого динамометрического элемента может быть выполнено по сферическим поверхностям или посредством вкладышей: сферического, цилиндрического или комбинации цилиндрического и деформируемого вкладышей.
Изобретения поясняются чертежами. На фиг. 1 показана принципиальная схема устройства для высокоскоростных импульсных испытаний волоконных образцов; на фиг. 2 - узел формирования нагружающего импульса; на фиг. 3 - варианты сопряжения приемного пуансона и упругого динамометрического элемента; на фиг. 4 - система захватов динамометрического испытательного устройства; на фиг. 5- схемные варианты фиксирования испытуемых волокон в захватах; на фиг. 6 - график сопоставления динамических импульсов сил, развивающихся в узле формирования нагрузки P1(t) и в образце P2(t).
Устройство включает в себя:
1 - Стержневой волноводный ударник;
2 - Приемный пуансон;
3 - Корпус устройства;
4 - Узел формирования нагружающего импульса;
5 - Датчик контроля нагружающего импульса;
6 - Узел (элемент) подвижного захвата;
7 - Фиксирующий корпус подвижного захвата;
8 - Образец;
9 - Неподвижный захват с плоскими губками;
10 - Неподвижный захват с заостренными губками;
11 - Фиксирующий конус неподвижного захвата;
12 - Датчик контроля импульса разрушающей нагрузки в образце.
Узел формирования нагружающего импульса включает в себя:
13 - Упруго-эластичная направляющая втулка;
14 - Упругий динамометрический элемент (с тензорезисторами) для определения нагружающего импульса P1(t);
15 - Инерционный элемент;
16 - Кронштейн;
17 - Жесткий вкладыш;
18 - Эластичный вкладыш;
6 - Подвижный захват (элемент);
19 - Пьезоэлектрический датчик для определения импульса разрушающего отклика образца P2(t).
Сопряжения приемного пуансона и упругого динамометрического элемента могут иметь следующие варианты (фиг. 3):
а) По сферическим поверхностям.
б) Через сферический вкладыш 20.
в) Через цилиндрический вкладыш 21.
г) Через комбинацию: цилиндрический вкладыш 21 и податливый (деформируемый) вкладыш 22.
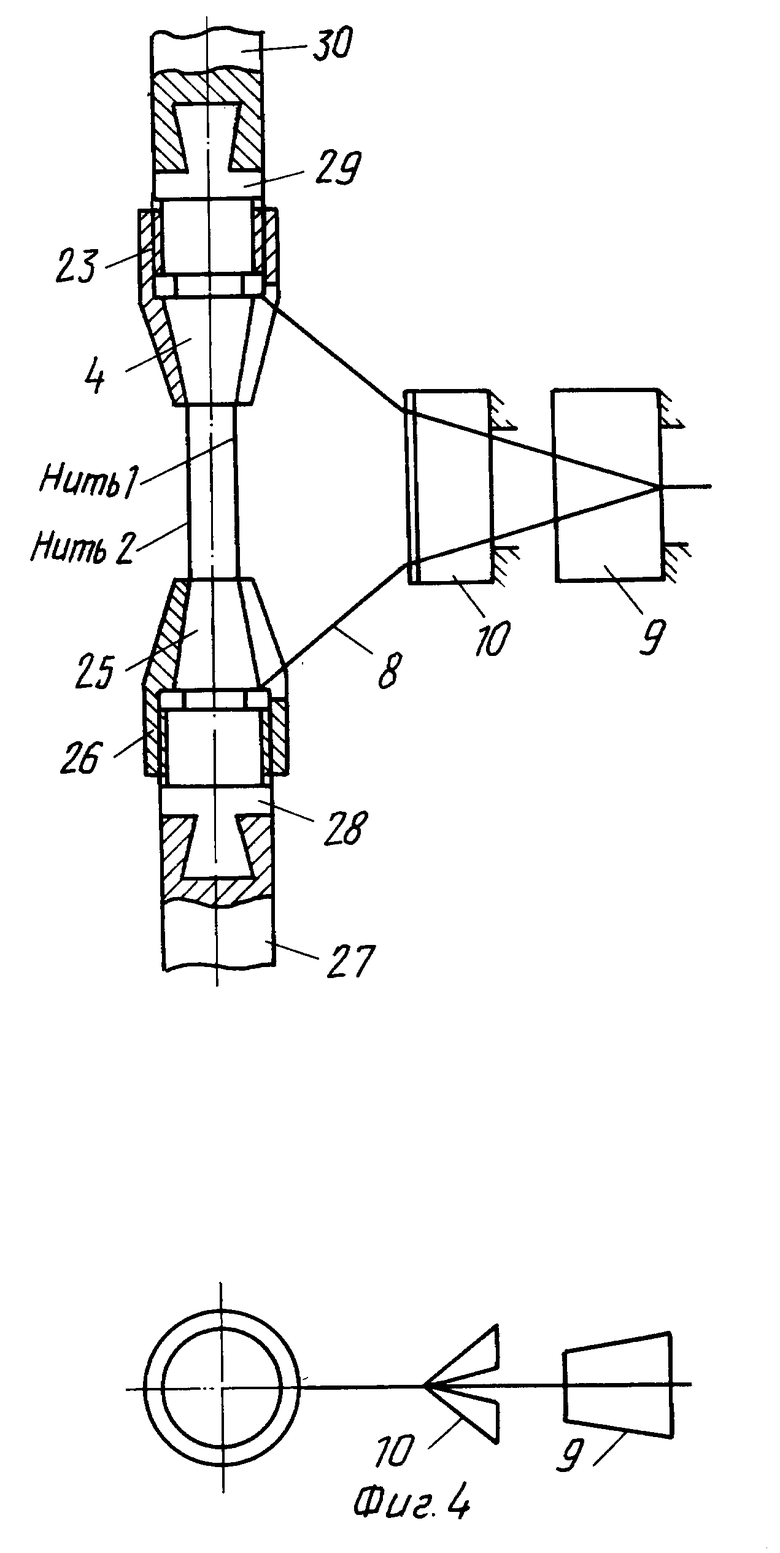
Система захватов динамического испытательного устройства включает в себя следующие элементы (фиг. 4):
23 - Корпус захвата;
24 - Фиксирующий конус;
25 - Фиксирующий конус подвижного захвата;
26 - Корпус подвижного захвата;
27 - Элемент сопряжения с кронштейном;
28 - Фиксирующий резьбовой валик подвижного захвата;
7 - Образец;
10 - Неподвижный захват с заостренными губками;
9 - Неподвижный захват с плоскими губками;
29 - Фиксирующий резьбовой валик;
30 - Корпус пьезоэлектрического датчика.
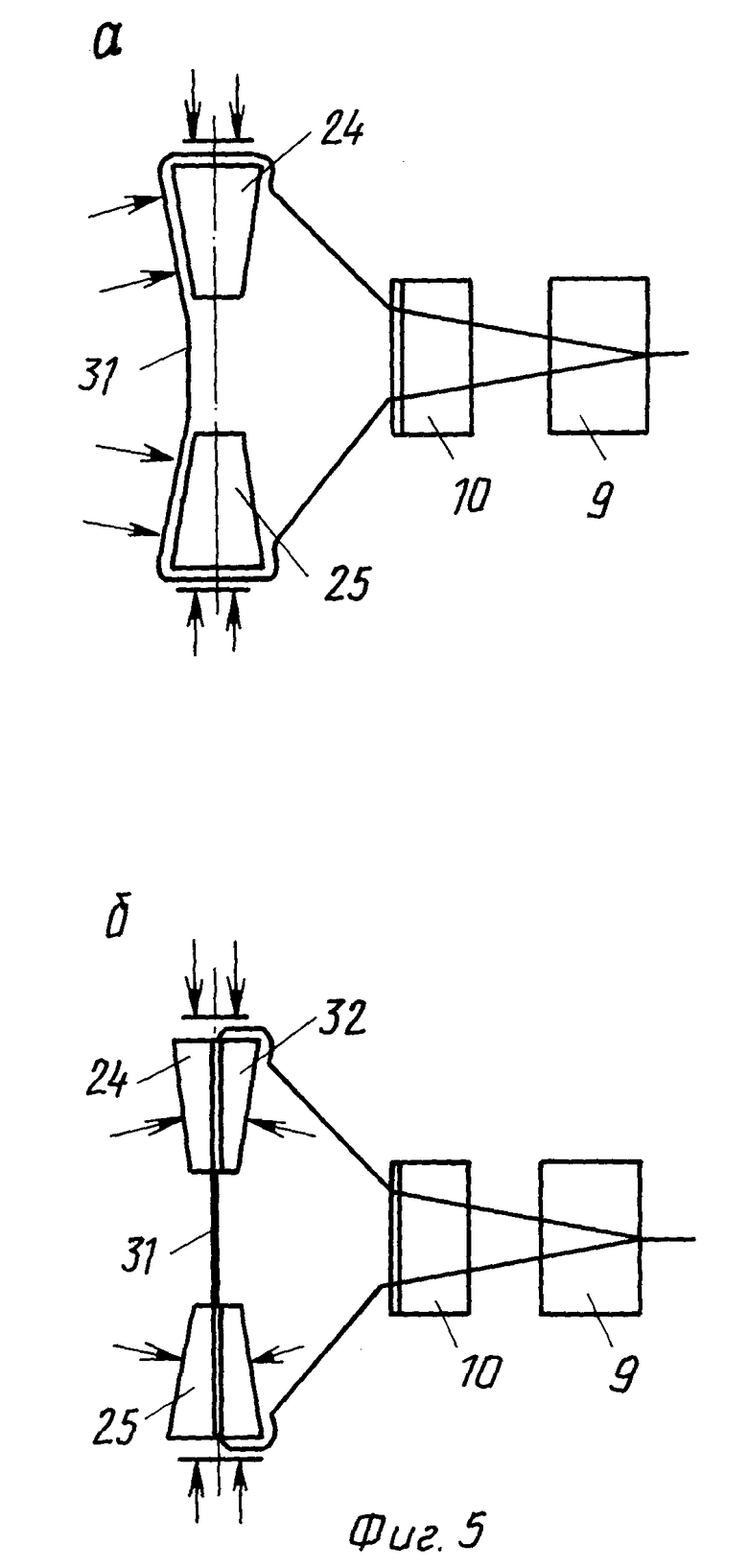
На фиг. 5 - представлены схемные варианты фиксирования испытуемых волокон в захватах:
а) С нецентральным размещением основной рабочей зоны 31 испытуемого волокна 8;
б) С центральным размещением основной рабочей зоны 31;
32 - фиксирующий клеевой слой.
Стрелками условно показано направление усилий фиксирования испытуемых волокон.
Работает устройство и осуществляется способ следующим образом.
Образец из волоконной нити (или из волоконного жгута) фиксируется в захватной системе по определенной траектории (см. фиг. 5 ), согласно которой:
свободная в пространстве рабочая зона образца с двух сторон фиксируется конусными элементами, размещенными в соосно установленных подвижном и неподвижном захватах;
далее волокно огибает торцевые части обоих конусов и дополнительно поджимается согласованными торцевыми валиками;
свободные концы волоконного образца выходят из вышеназванных захватов и далее фиксируются третьим захватом с заостренными губками и затем - четвертым захватом с плоскими губками.
Заданным образом сформированный импульс динамической нагрузки подводится к образцу посредством подвижного захвата.
В процессе испытаний одна часть образца неподвижна, вторая часть - подвергается импульсно-волновому воздействию через подвижный захват.
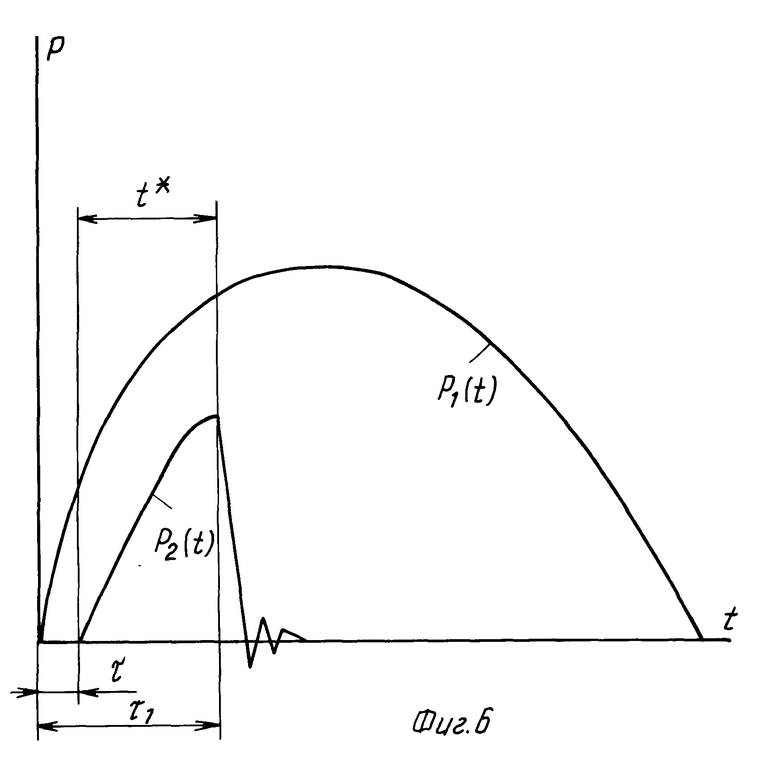
Нагружающий импульс формируется таким образом, чтобы обеспечивалась определенная длительность разрушающего импульса нагрузки, что обеспечивает достижение необходимых скоростей деформации рабочих зон образцов.
В описанной захватной системе может быть подвергнута и импульсному воздействию, как единичная нить, так и параллельный комплекс нескольких нитей из однотипных или разнотипных волокон, фиксируемых по описанной выше траектории укладки в захватах.
Описываемый способ предусматривает схемы нагружения испытуемых нитей и тканей:
а) одноосное растяжение только одной зоны волоконной нити: на участке между соосными конусами;
б) комбинированное растяжение двух зон испытуемой нити: на участке между соосными конусами, и на участке между подвижным захватом и системой неподвижных боковых захватов;
в) комбинированное растяжение одной зоны испытуемой нити: на участке между подвижным захватом и системой неподвижных боковых захватов;
г) одноосное растяжение рабочей зоны образцы ткани на участке между соосными конусами.
По схеме п. г) предусмотрено два варианта испытаний образцов:
1) образцов в виде полосок фиксированной ширины, укрепляемых в системе захватов, аналогично образцу нити по схеме a);
2) образцов в виде замкнутого по цилиндрической поверхности контура из сплошного фрагмента ткани. При этом фрагмент ткани оборачивается вокруг поверхностей конусов, поджимается поверхностями конусов (боковыми и торцевыми) и также фиксируется дополнительными неподвижными захватами.
В процессе импульсного нагружения нити или образца ткани регистрируют два импульса динамических сил:
a) импульс P1(t) предварительно сформированной и подводимой к образцу динамической нагрузки;
b) импульс P2(t) развивающегося в испытуемом образце динамического усилия отклика последнего на импульсную нагрузку.
Используемая система захватов позволяет:
- зафиксировать образец с устранением эффекта "относительного" проскальзывания волокон. Об этого убедительно свидетельствует характер осциллограмм, не имеющих "зон проскальзывания"
- посредством введения вторичного захвата 10 с заостренными губками значительно ограничить эффект "внутреннего" проскальзывания единичных фрагментов во всех зонах образца, кроме рабочей зоны. Об этом свидетельствует последующее излучение всех зон образцов, подвергнутых разрушающему импульсному воздействия;
- устранить "случайные" колебания свободной рабочей части образца. Осциллограммы не имеют наложенных высокочастотных колебательных мод. Без данной системы закрепления образцов колебательный фон практически всегда присутствует на осциллограммах;
- обеспечить закон нагружения ε = const, что дает возможность обоснованно сопоставлять получаемые данным способом результаты испытаний с результатами, получаемыми другими, например статическими методами, реализующими тот же закон нагружения;
- определять широкий спектр деформационно-прочностных характеристик испытуемых волокон и, в частности:
- диаграмму деформирования в координатах "динамическое усилие - деформация";
- разрушающие нагрузки;
- разрушающие комплексные деформации волокон;
- полную энергоемкость разрушения волоконной системы;
- затраты энергии (и ее интенсивность) на развитие отдельных этапов деформирования и разрушения нити.
Предлагаемая система захватов предусматривает многопозиционное закрепление волокон в рабочем состоянии. Рассмотрим позиции фиксирования различных зон волоконного образца:
Вариант на фиг. 5, а): Волокно фиксируется по гладкой поверхности конусных вкладышей; далее по гладким поверхностям торцев конусных вкладышей; далее - заостренными кромками неподвижного захвата 10; далее плоскими поверхностями захвата 9.
В этом варианте единичный образец расположен не по центральной оси конусных вкладышей. Схема поджима на поверхностях фиксации условно показана стрелками.
Вариант на фиг. 5 б): Отличается от предыдущего только тем, что начальное закрепление образца осуществляется через пропитывающий и отвержденный клеевой слой 32 в центральной области разрезных полуконусов. Далее образец фиксируется также, как и в предыдущем варианте.
При варианте фиг. 5 а) возможны виды испытаний:
1) Показанный на фиг. вид испытания одиночной нити (жгута);
2) Испытание одновременно двух нитей (фиг. 4), расположенных напротив друг друга по диаметру конусных вкладышей;
3) Испытание одновременно нескольких нитей, располагаемых равномерно по окружности сечений конусных вкладышей.
Виды испытаний 2) и 3) целесообразны для излучения эффектов взаимного влияния друг на друга волокон различной физико-химической природы.
Использование захвата 10 с заостренными губками позволяет стабилизировать выходящие из первичного зацепления концы волокон; ограничить "внутреннее" скольжение фрагментов разрушающихся пучков волокон.
Захват 9 с плоскими губками позволяет дополнительно компенсировать волновую энергию импульсного воздействия, распространяющуюся из рабочей зоны волоконного образца и способную вызывать "случайные" колебательные моды.
Конкретная реализация изобретений осуществляется следующим образом:
Производится импульсное воздействие ударником 1 по приемному пуансону 2, размещенному в корпусе 3 узла 4 формирования нагружающего импульса P1(t). В отдельном узле 6 осуществляется передача импульса нагрузки "подвижному" захвату 7 и образцу 8. Неподвижный захват 11 совмещен с датчиком пьезоэлектрического типа 12 для контроля импульса реакции образца P2(t) на динамическую нагрузку. Дополнительное фиксирование образца в процессе испытания осуществляется захватами 9 и 10. Выход с датчиков 5 и 12 соединен с комплексом регистрирующей аппаратуры, в состав которого входит: широкополосной усилитель, цифровой запоминающий осциллограф, персональный компьютер, фотоэлектрический согласующий прибор и др.
Сигналы импульсов P1(t) и R2(t) регистрируются и подвергаются вычислительной обработке по специальной программе.
Система последовательных элементов, сопряженных с пуансоном 2, размещена в продольной упруго-эластичной втулке 13, которую целесообразно изготавливать из материалов, типа фторопластов. Совмещение пуансона 2 и упругого динамометрического элемента 14 произведено по гладкой скользящей поверхности, а совмещение остальных элементов узла 4 осуществляется жестко. В специальном гнезде кронштейна 16 установлено звено регулирования параметров сопряжения кронштейна и подвижного захвата 6 (показано условно). На фиг. 2 дан вариант этого звена, состоящего из жесткого вкладыша 17 и упруго-эластичной опоры 19.
Вкладыш 22 может быть изготовлен из фторопласта, различных эластомеров и т. п. Цилиндрический вкладыш 21 целесообразно изготавливать из титанового сплава.
Предлагаемые варианты сопряжения пуансона 2 и элемента 14 являются одним из способов регулирования параметров импульса P1(t) по : длительности, форме импульса, достигаемым уровням динамических усилий на различных временных этапах развития импульса и т.д.
Другими факторами регулирования (и назначения) импульса P1(t) являются:
- инерционный элемент 15;
- звено сопряжения кронштейна 16 и захвата 6.

Изобретение относится к испытательной техники, используется при подготовке к производству волоконных нитей, жгутов и тканей, а также изделий из них. Способ заключается в том, что в подвижном и неподвижном захватах закрепляют среднюю часть испытуемого образца, а концы - в по крайне мере одном дополнительном захвате. Смежные участки испытуемого образца, ограниченные захватами, располагают под углом друг к другу. Осуществляют импульсное силовое воздействие на подвижный захват. Устройство содержит волноводный стержнеобразный ударник, узел формирования нагружающего импульса со встроенным датчиком для контроля начального импульса динамической нагрузки, захватно-фиксирующий узел для крепления образца и возбуждения в нем заданного импульса нагрузки, датчиковый узел для контроля параметров. Изобретения позволяют повысить информативность испытаний и надежность определения параметров. 2 c. и 7 з.п.ф-лы, 6 ил.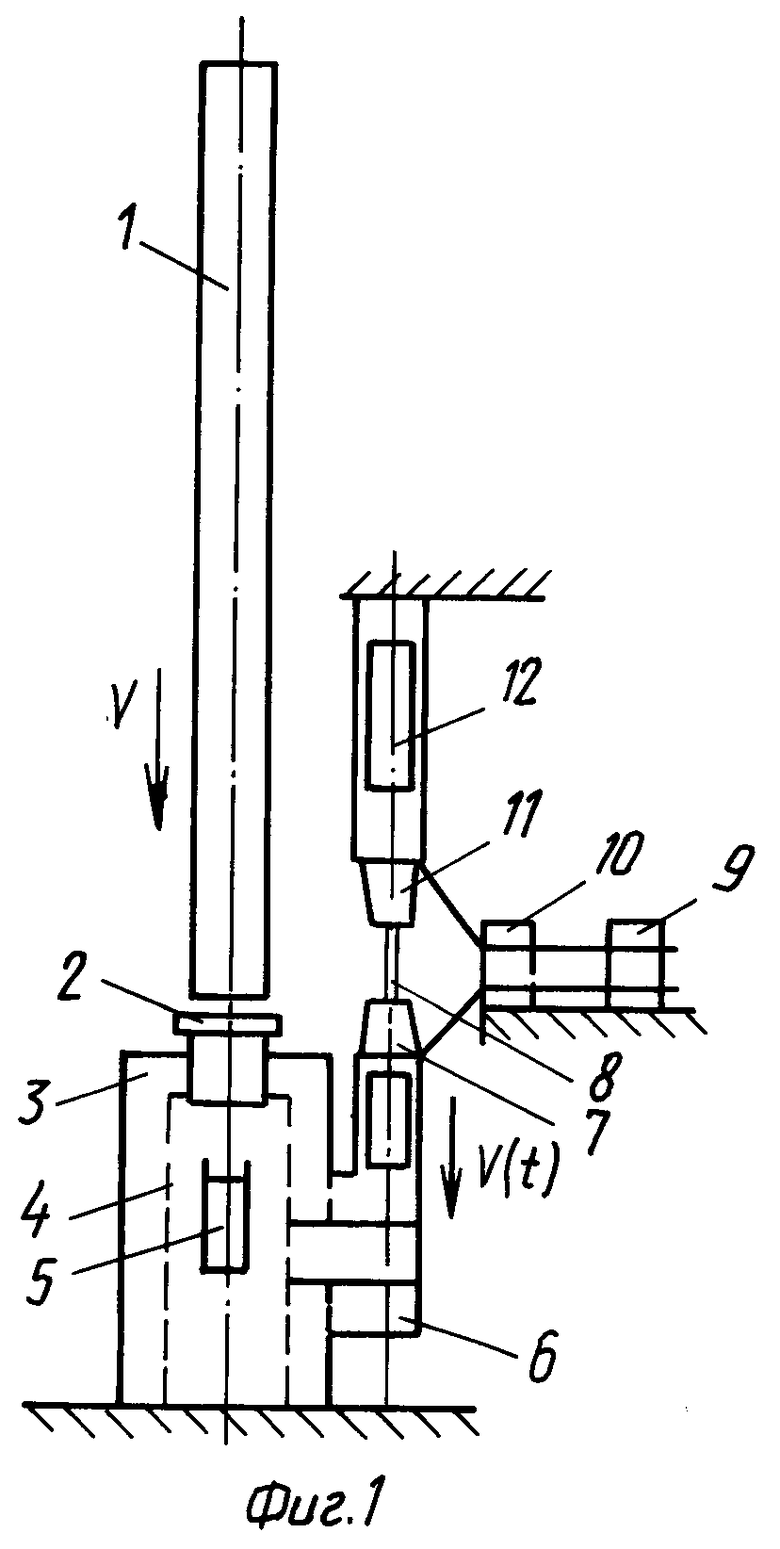
| SU, N 1303885 A, 1985 | |||
| SU, N 832415 A, 1979. |
