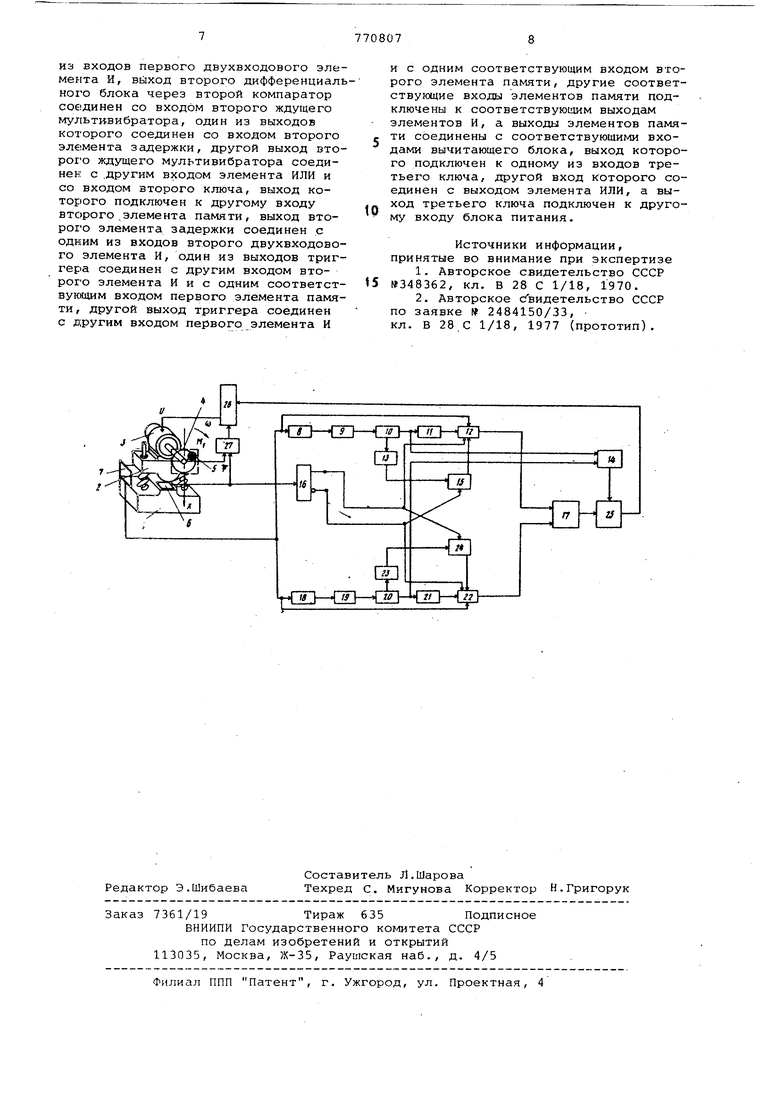
Изобретение относится к области автоматизации режимов работы машин вибрационного и ударно-вибрационного действия с кривошипно-шатунным (эксцентриковым) или центробежным . возбудителями колебаний, предназначенных для уплотнения грунтов и других материалов, забивки свай, формования изделий из бетонных смесей и т.д, Известно устройство для автоматического регулирования режима работы Мс1шии виброударного действия, содержащее датчик момента удара-, распреде литё1пя импульсов, логические элементы И и блок питания 1 . Известно и другое устройство для автоматического регулирования режима работы машин виброударного действия, содержащее датчик момента удара, распределитель, кинематически свяэан шлй с валом возбудителя колебаний, блок формирования, блок питания силового двигателя, причем датчик мо-. мента удара соединен с одним из входов блока формирования,, другой вход которого соединен с распределителем, а выход блока фор1мирования подключен к одно1 1у из входов блока питания 23 С помощью известных устройств не удается реализовать полностью все потенциальные возможности вибрационных и виброударных машин, особенно резонансных. Это обусловливается тем, 4то известные устройства по своему конструктивному исполнению имеют ограниченную точность поддержания регулируемой величины - фазового угла удара, что является, как известно, общим недостатком всех систем, выполненных по принципу автоматической стабилизации регулируемого параметра, способных оказывать регулирующее воздействие на объект управления лишь при наличии ошибки, Кроме того, в связи с тем, что информация о фактическом значении регулируемой величины не может быть получена на протяжении всего ударного цикла, а поступает лишь дискретно, только в моменты начала ударов (от датчика момента удара при соударениях ударной части с ограничителем), и по этой причине известные устройства также ограничены по точности и быстродействию, Цель изобретения - повышение точности и быстродействия. Эта цель достигается тем, что уст ройство для автоматического регулиро вания режима работы машин виброударн гс действия, содержащее датчик момен та удара, распределитель, кинематически связанный с валом возбудителя колебаний, блок формирования и блок питания силового двигателя, причем датчик момента удара соединен с одним из входов блока формирования., Kpyrofi вход которого соединен с распределителем, а выход блока формк рования подключен к одному из входов блока питания, снабжено датчиком амплитуды колебаний, двумя дифференцирующими блоками, двумя компараторами, двумя ждущими мультивибраторами, тремя ключами, двумя элементами пс1мяти, двумя элементами задержки, логическим элементом ИЛИ, двумя двухвходовыми элементами И, триггером и вычитающим блоком, причем датчик амплитуды колебаний подключен к одному из входов первого элемента памяти, ко входу первого дифференциального блока, ко входу второго дифференциального блока и к одному из входов второго элемента памяти, выход первого дифференциаль ного блока через первый компаратор подключен ко входу первого ждущего мультивибратора, один из выходов ко торого соединен со входом первого элемента задержки, другой выход первого ждущего мультивибратора соединен с одним из входов элемента ИЛИ и со входом первого ключа, выход которого одключен к другому входу первого элемента памяти, выхо первого элемента задержки .соединён с одним из входов первого двухвходо вого элемента И, выход второго дифференциального блока через второй компаратор соединен со входом второ го ждущего мультивибратора, один из выходов которого соединен со вхо дом второго элемента Зсщержки,. другой выход второго ждущего мультивиб ратора соединен с другим входом элемента ИЛИ и со входом второго ключа, выход которого подключен к другому входу второго, элемента памя ти, выход второго элемента задержки соединен с одним из входов второго двухвходового элемента И, один из выходов триггера соединен с другим входом второго элемента И и с одним соответствующим входом первого элемента памяти, другой выход триггера соединен с другим входом первого эл И и с одним соответствующим входом второго элемента памяти, дру гие соответствующие входы элементов памяти подключены к cooтвeтctвyющим выходам элементов И, а выходы элементов памяти соединены с соответст вукидими входами вычитаквдего блока, выход которого подключен к одному ji2 входов третьего ключа, другой вход которого соединен с выходом элемента ИЛИ, а выходтретьего ключа подключен к другому входу блока питания. Устройство представлено на чертеже и содержит: ограничитель 1, ударную часть 2, эле стродвигатель 3, распределитель импульсов 4, вал 5 возбудителя колебаний, датчик б момента удара, датчик 7 амплитуды колебаний, первый дифференцирующий блок 8, первый компаратор 9, первый ждущий мультивибратор 10, первый ключ 11, первый элемент сравнения 12, первый элемент задержки 13, логический элемент ИЛИ 14, логический двухвходовой элемент И 15, триггер 16, вычислительный блок 17, второй диф- ференцирующий блок 18, второй компаратор 19, второй ждущий мультивибратор 20, второй ключ 21, второй элемент памяти 22, второй элемент задержки 23, второй двухвходовой элемент И 24, третий ключ 25, блок питания 26 силового электродвигателя и блок формирования 27. Устрой-ство .работает следующим образом. При колебаниях ударной части 2 виброударной машины датчик амплитуды колебаний 7 формирует сигнал, пропорциональный величине перемещения ударной части относительно ограничителя (плиты) 1 . Этот сигнал поступает на входы дифференцирующих блоков 8и 18, а также на информационные входы аналоговых ключей 11 и 21. Датчик момента удара 6 управляет связанным с ним триггером 16, который при каждом появлении сигнала импульса) от датчика перебрасывается в одно из двух своих устойчивых состояний, отпирая при этом элемент памяти 12 и запирая другой элемент памяти 22. Одновременно подготавливается к срабатыванию двухвходового логического элемента И связанный одним своим входом с тем выходом триггера 16, на котором в это время сигнал 1. Сигнал от датчика 7 дифференцируется в блоках 8 и 18. С их выходов сигналы, пропорциональные скорости перемещения ударной части, поступают соответственно на входы компараторов 9и 19. Последние формируют на своих выходах сигналы в моменты, когда на входах дифференцирующих блоков 8 и 18 сигналы равны нулю, т.е. в моменты времени, когда перемещение ударной части виброударной машины относительно ограничителя в ударном цикле достигает своего максимума. При этом %апусксиотся ждущие мультивибраторы 10 и 20, которые формируют на своих выходах импульсы, поступающие на управляющие входы соответственно аналоговых ключей 11 и 21, а также на связанные с ними входы логического элемента ИЛИ 14 и элементов задержек 13 и 23. Аналоговые ключи 11 и 21 оггкрываются и пропускают на входы элементов памяти 12 и 22 сигналы от датчика 7, пропорциональные максимальному перемещению ударной части относительно ограничителя. В результате на открытом элементе памяти запоминается величина амплит ды колебаний за контролируемый удар ный цикл. В рассматриваемом случае это реализуется элементом памяти 12 В следующем ударном цикле запоминание величины амплитуды колебаний произойдет в элементе памяти 22 ибо триггер 16 в момент удара ударной части, импульсом от датчика б момента удара переведется в другое устойчивое состояние, при котором элемент памяти 22 открыт для запоми нания, а элемент памяти 12 наоборот заперт. Результаты измерения величи амплитуд двух последовательных удар ных циклов сравниваются в вычитающем блоке 17) а величина их разности в виде сигнала поступает на информа ционный вход аналогового ключа 25, управляемого логическим элементом ИЛИ 14. Поскольку на управляющих входах элемента 14 сигнал с выходов ждущих мультивибраторов 10 и 20 поступают лишь в моменты, когда отклонения ударной части виброударной машины от ограничителя достигают своих максимальных значений, т.е. всегда несколько раньше, чем произой дет очередное соударение ударной части с ограничителем, сигнал с выхода аналогового ключа 25 поступает на вход блока питания 26 силового двигателя с упреждением по сравнению с сигналом от блока 27, формируняцего управляющий сигнал пропорцио нальный величине отклонения фазового угла удара от заданного значения. Этим ускоряется формирование требуемого регулирующего воздействия, чем и обеспечивается повышение быстродей ствия и точности системы автоматичес кого управления. После производства сравнения величины очередной амплитуды с пред,шествующей, предшествующий результат через интервал времени, достаточный для выполнения операций по оравнению измеряемых величин и формированию регулирующего воздействия, стираетс в соответствующем элементе памяти, которое таким образом готовится к запоминанию результата очередного измерения. Это обеспечивается с помощью подачи сигнала от ждущих мультивибраторов 10 и 20 на соответствую щие логические элементы И 15 и 24 через элемент задержки. При этом списывается зафиксированный ранее результат в том элемент, памяти, на вход сброс памяти на который поступает сигнал с выхода связанного с этим логического элемента И. Таким образом, величины максимальных отклонений ударной части измеряются датчиком 7 амплитуды колебаний, поочередно запоминаются элементаг ш памяти 12 и 22, сравниваются в вычитающем блоке 17, результаты сравнения (при неравенствах амплитуд) формируются в управляющий сигнал на входе блока 26, компенсирующий соответствующим изменением скорости W вращения вала возбудителя колебаний возмущакяцее воздействие, оказываемое на виброударную машину. В случае, если это регулирующее воздействие оказывается недостаточным для исключения отклонения регулируемой величины (фазового угла удара) от заданного значения, включаетсяв работу второй канал управления, состоящий из датчика 7 момента удара, распределителя импульсов 4 и блока 27, формирующего управляющий сигнал на входе блока 26, пропорциональный величине ошибки. Формула изобретения Устройство для автоматического регулирования режима работы машин виброударного дейстаия содержащее датчик момента удара, распр(Эделитель, кинематически связанный с вале возбудителя колебаний, блок формирования и блок питания силового двигателя, причем датчик момента удара соединен с одним из входов блока формирования, другой вход которого соединен с распределителем, а выход блока формирования подключен к одному из входов блока питания, отличающееся тем, что, с целью повышения точности и быстродействия, оно снабжено датчиком г1мплитуды колебаний, двумя дифференцирующими блоками, двумя компараторгьми, двумя ждущими мультивибраторами, тремя ключами , двумя элементами памяти, двумя элементами задержки, логическим элементом ИЛИ, двумя двухвходовыми элементами И, триггером и вычитающим блоком, причем датчик амплитуды ксэлебаний подключен к одному из входов первого элемента памяти, ко входу ; первого дифференциального блока, ко входу второго дифференциального блока и к одному из входов второго элемента памяти, выход первого дифференциального блока через первый компаратор подключен ко входу первого ждущего мультивибратора, один из выходов которого соединен со входом первого элемента задержки, другой выход первого ждущего мультивибратора соединен с одним из входов элемента ИЛИ и со входом первого ключа, выход которого подключен к другому входу первого элемента памяти, выход первого элемента задержки соединен с одним
из входов первого двухвходового элемента И, выход второго дифференциального блока через второй компаратор соединен со входом второго ждущего мультивибратора, один из выходов которого соединен со входом второго элемента задержки, другой выход второго ждущего мультивибратора соединен с .другим входом элемента ИЛИ и со входом второго ключа, выход которого подключен к другому входу второго .элемента памяти, выход втоpoio элемента задержки соединен с одним из входов второго двухвходового элемента И, один из выходов триггера соединен с другим входом второго элемента И и с одним соответствующим входом первого элемента памяти , другой выход триггера соединен с другим входом первого элемента И
и с одним соответствующим входом второго элемента памяти, другие соответствующие входы элементов памяти подключены к соответствующим выходам элементов И, а выходы элементов памяти соединены с соответствующими входами вычитающего блока, выход которого подключен к одному из входов третьего ключа, другой вход которого соединен с выходом элемента ИЛИ, а выход третьего ключа подключен к другому входу блока питания.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР №348362, кл. В 28 С 1/18, 1970.
2.Авторское свидетельство СССР по заявке № 2484150/33,
кл. В 28 С 1/18, 1977 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения амплитуды колебаний баланса механических часов | 1985 |
|
SU1254430A1 |
| Система для автоматического регулирования режима работы машин виброударного действия | 1976 |
|
SU633985A1 |
| УСТРОЙСТВО ДЛЯ ВОССТАНОВЛЕНИЯ ВРЕМЕННЫХ ПАРАМЕТРОВ ФЛУКТУИРУЮЩИХ ИМПУЛЬСНЫХ СИГНАЛОВ | 1993 |
|
RU2060509C1 |
| Устройство автоматической регулировки усиления | 1974 |
|
SU567201A1 |
| Устройство управления паровоздушным молотом | 1983 |
|
SU1131584A1 |
| Устройство для измерения амплитуды колебаний баланса механических часов | 1986 |
|
SU1385121A1 |
| СИСТЕМА ОБРАБОТКИ СИГНАЛОВ | 2006 |
|
RU2326359C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ЭНЕРГЕТИЧЕСКИХ ПАРАМЕТРОВ АНТЕННЫ | 1995 |
|
RU2139549C1 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ПОМЕХОУСТОЙЧИВОСТИ ПРИЕМНИКА ВИДЕОСИГНАЛОВ | 1993 |
|
RU2048680C1 |
| Устройство для регулирования величины деформации проводника при сварке | 1978 |
|
SU740445A1 |
