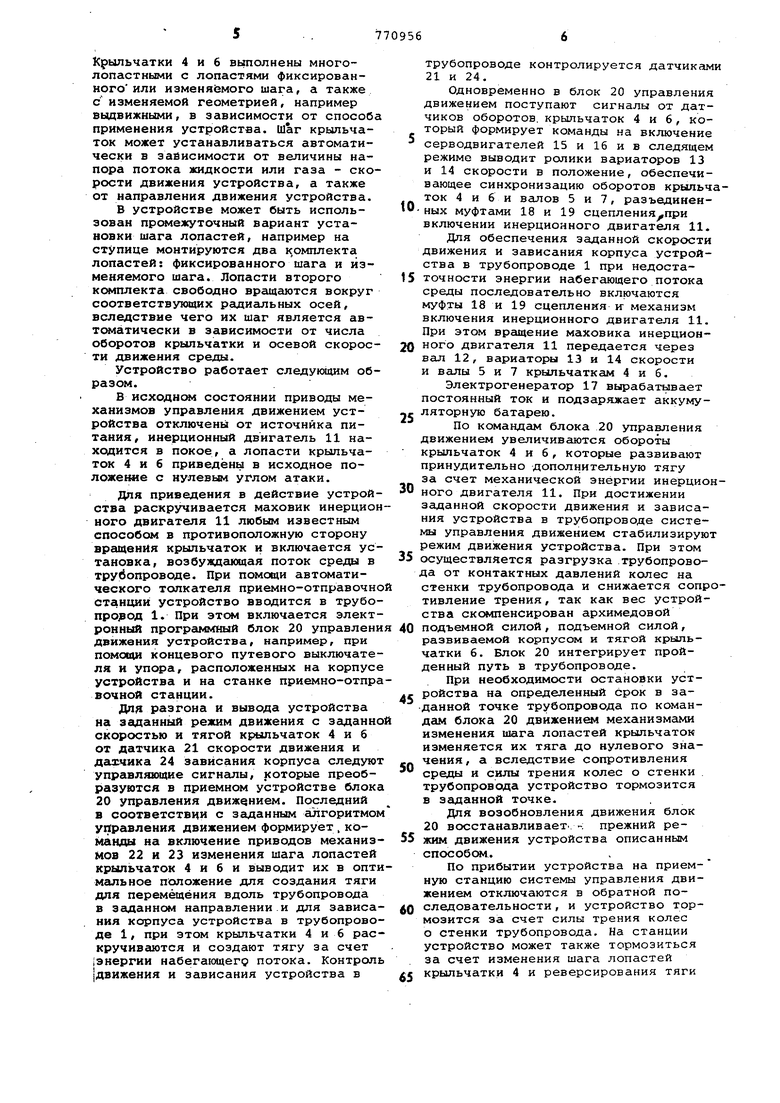
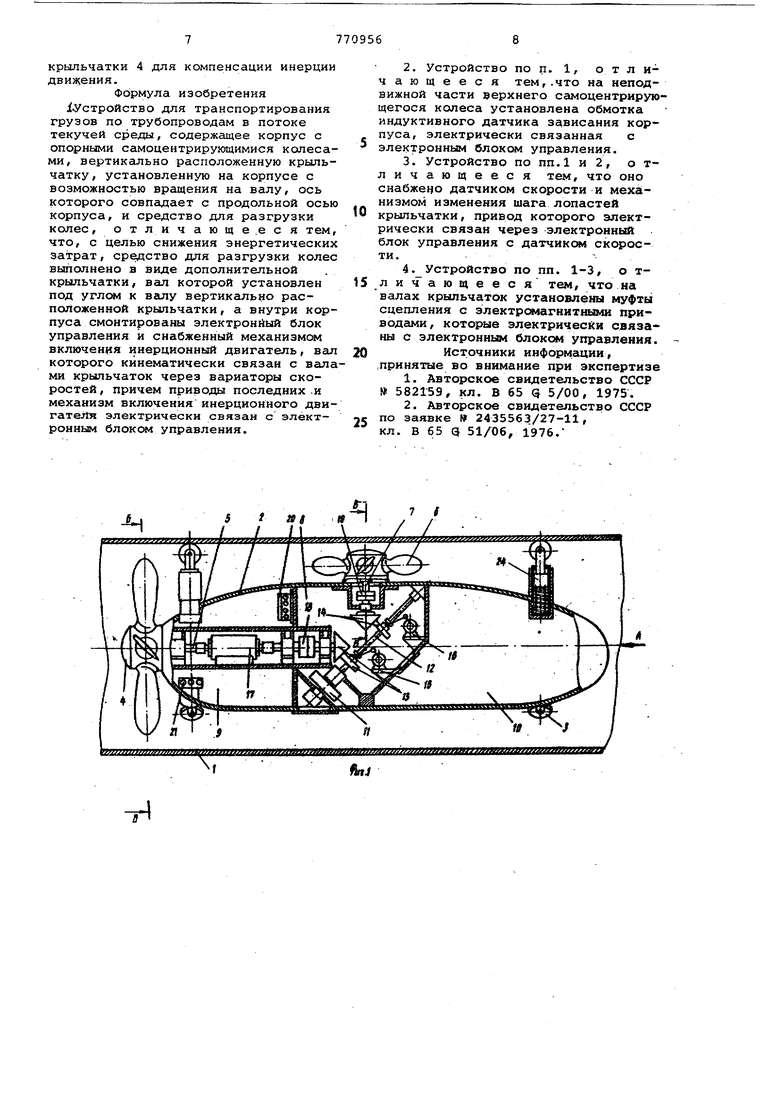
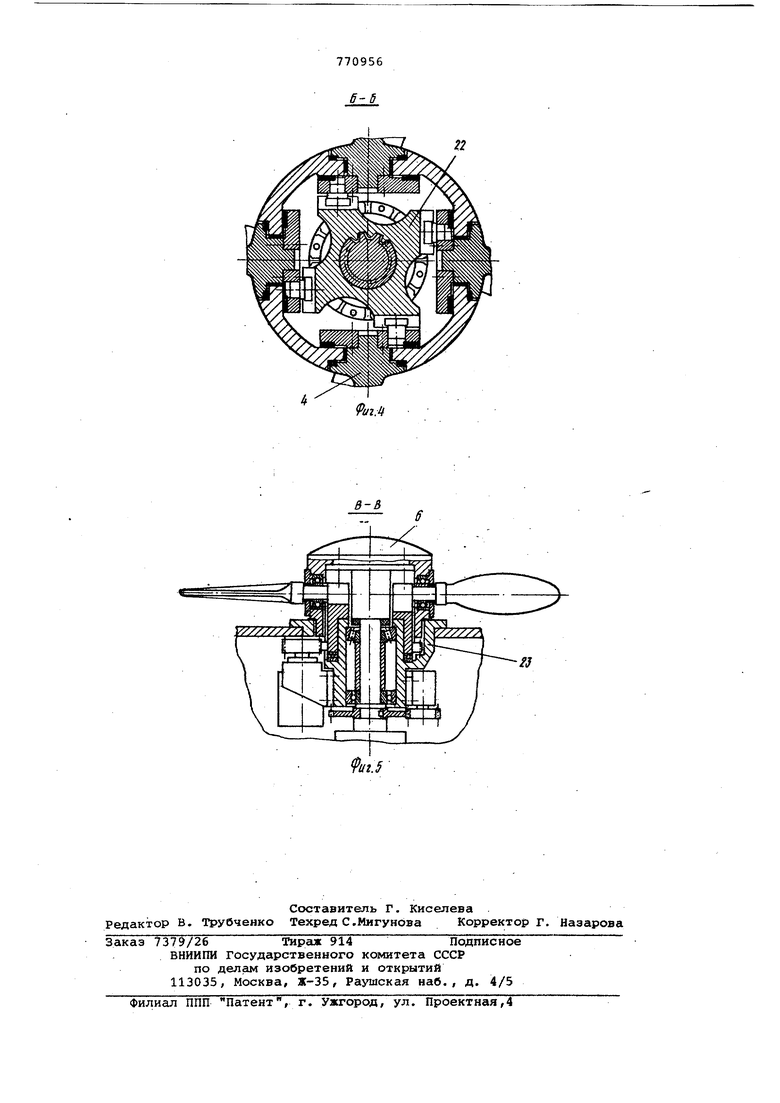
(54)УСТРОЙСТВО ДЛЯ Т ТРУБОПРОВОДАМ Изобретение относится к трубопроводному контейнерному транспорту, а именно к устройствам для транспортирования грузов по трубопроводам в потоке текучей среды. Известно устройство для транспортирования грузов по трубопроводу в потоке текучей среды, содержащее корпус с опорными колесами и вращающуюся вокруг продольной оси корпуса крыльчатку 1. Для разгрузки колес с одновременным исключением вращения корпуса вокруг своей продольной оси на боковой поверхности корпуса вдоль его оси установлено крыло аэродинамического профиля, об{)ащенное выпуклой частью в сторону, противоположну вргицению крьшьчатки. Устройство имеет простое конструк тивное исполнение, но не обеспечивает разгрузку трубопровода от контактных давлений колес и регулирование скорости движения в трубопроводе Известно устройство для транспор тй- рования грузов по трубопроводам в потоке текучей среды, содержащее кор пус с опорными самоцентрирующимися Колесг1ми, вертикально расположенную крьшьчатку, установленную на корпусе с возможностью вращения на валу, ось СРЕ ПОРТИРОВАНИЯ ГРУЗОВ ПО ПОТОКЕ ТЕКУЧЕЙ которого совпадает с продольной осью корпуса, и средство ,цля разгрузки колес 2.. В этом устройстве средство для разгрузки колес выполнено в виде установленных вдоль оси контейнера крыльев аэродинамического профиля, которые уменьшают нагрузку на колеса контейнера. На создание силы тяги винта или кpьiльчaтки расходуется 0,5-0,7 мощности насосных и компрессорных установок. Следовательно, для совместного транспортирования жидкости или газа и устройств по трубопроводу насосные станции и компрессорные установки должны проектироваться с запасом мощности, что экономически невыгодно. Движению устройства препятствует сопротивление, на преодоление которого расходуется мощность, пропорциональная кубу скорости объекта. Следовательно, мощность насосных или компрессорных установок должна проектироваться из расчета в 1,5-2 раза больше по сравнению с настоящими установками. В устройстве не предусмотрено управление движением, в частности регулирование скорости движения в трубопроводе или при отключении насосных или компрессорных установок аварийная ситуация). При длительном отсутствии напора устройство заиливается выпадгисядими осадками из жилкости , при этом потребуется дополнительная мощность насосной станции для проталкивания устройства по трубопроводу. Цель изобретения - снижение энергетических затрат. Достигается это тем,что средство для разгрузки капес вьтолнено в виде дополнительной крыльчатки, вил которой уста новлен под углом к валу вертикально расположенной крыльчатки, а внутри корпуса смонтированы элект ронный блок управления и снабженный механизмом включения инерционный дви гатель , вал которого кинематически связан с валами крыльчаток через вариаторы скоростей, причем приводы последних и механизм включения инерционного двигателя электрически связаны с электронным блоком управления Кроме того, на неподвижной части верхнего самоцентрирующегося колеса установлена обмотка индуктивного дат чика зависания корпуса, электрически связанная с электронным блоком управ ления. Устройство снабжено датчиком скорости и механизмом изменения шага лопастей крыльчатки, привод которого электрически связан через электронны блок управления с датчике скорости. На валах крыльчаток установлены муфты сцепления с электромагнитными приводами, которые электрически связ ны с электронным блоком управления. На фиг. 1 изображено устройство продольный разрез; на фиг. 2 - вид по стрелке А на фиг. 1; на фиг. 3 принципиальная кинематическая схема устройства5 на фиг. 4 - сечение В-В фиг. 1} на фиг. 5 - сечение В-В фиг. 1. Устройство, перемещаемое в трубопроводе 1, содержит корпус 2 на опор ных самоцентрирующихся колесах 3« На корпусе 2 установлена крыльчатка 4 с возможностью вращения на вгшу 5, ось которого совпадает с продольной осью корпуса 2, и средство для разгрузки колес 3, выполненное в виде дополнительной крыльчатки 6, вал 7 которой расположен под углом к валу 5 Лрыльчатки 4. Корпус разделен на герметизированные, отсеки 8-10. В отсеке 8 размещен инерционный двигатель 11, выходной вал 12 которого кинематически связан через конусные вариаторы 13 и 14 скорости с валами 5 и 7 крыльчаток 4 и 6. Инерционный двигатель 11 установ лен в вакуумированной плоскости, от 15ачка воздуха из которой осущвстаяется на приемно-отпрай&чНЫх стан-: циях. Раскрутка инерционного двигателя осуществляется, например от электродвигателя при помощи фрикционного диска на приемно-отправочных станциях. Вариаторы 13 и 14 скорости состоят из конусов и роликов, перемещаемых на выходном валу 12 инерционного двигателя 11 серводвигателями 15 и 16. На валу 5 в отсеке 9 размещен электрогенератор 17, в этом же отсеке находится аккумуляторная батарея (не показана), подзарядка которой осуществляется от электрогенератора 17. Валы 5 и 7 крыльчаток 4 и 6 .снабжены муфтгши 18 и 19 сцепленное например, с электрсдаагннтными приводами. Для управления движением устройства в отсеке 9 размещен электронный блок 20 управления и датчик 21 скорости движения устройства. Датчик 21 предназначен для измерения скорости движения, а также для измерения пройденного расстояния и определения направления движения и связан с верхним и нижним колесами 3(связь датчика 21 с колесами 3 условно не показана),Блок 20, питае1«1й от электрогенератора 17, через аккумуляторную электрически связан с серводвигателями 15 и 16 с проводами муфт 18 и 19 сцепления, датчиком 21 скорости движения устройства н с механизмами 22 изменения шага лопастей крыльчатки и с механизмом 23 из-менения шага крыльчатки 6. на неподвижной части стойки аерхних колес 3 установлена оЪмотка индуктивного датчика 24 для контроля и регулирования эгшисания устройства в трубопроводе 1. Эта обмотка подключена к блоку 20. для исключения перенгшряжений в кинематической схеме устройства крыльчатки 4 и 6 снабжены датчиками оборотов (условно не показаны), которые электрически связаны с блоксм 20. Для повьяиения экономичности ин$рционного двигателя 11 и долговечности вариаторов 13 и 14 скорости инерционный двигатель 11 снабжен муфтой сцепления и механизмом 25 включения инерционного двигателя 11 с электромагнитным приводе. Электромагнит механизма включения инерцион- ного двигателя 11 (условно не показан) электрически связан .с блоком 20 управления движением устройства. П раметры инерционного двигателя 11 вводятся в блок 20 управления движением. В герметизированном отсеке 10 размещается транспортируемый груз. Крыльчатка 4 предназна на для сообщения движения устройству вдоль трубопровод г а крыльчатка 6 - для 4 азгрузки.трубопровода от контактных давлений колес корпуса путем зависания устройства в трубопроводе.
Крьольчатки 4 и 6 вьтолнены многолопастными с лопастями фиксированного или изменяемого шага, а также с изменяемой геометрией, например вьщвижными, в зависимости от способа применения устройства. Шаг крыльчаток может устанавливаться автоматически в зависимости от величины напора потока жидкости или газа - скорости движения устройства, а также от направления движения устройства.
В устройстве может быть использован промежуточный вариант установки шага лопастей, например на ступице монтируются два комплекта лопастей; фиксированного шага и изменяемого шага. Лопасти второго комплекта свободно вращаются вокруг соответствующих радиальных осей, вследствие чего их шаг является автоматически в зависимости от числа оборотов крыльчатки и осевой скорости движения среды.
Устройство работает следукяцим образом.
В ИСХОДНСИ4 состоянии приводы механизмов управления движением устройства отключены от источника питания, инерционный двигатель 11 находится в покое, а лопасти крыльчаток 4 и б приведены в исходное положение с нулевым углом атаки.
Для приведения в действие устройства раскручивается маховик инерционного двигателя 11 любым известным способом в противоположную сторону вращения крыльчаток и включается установка, возбуждающая поток среды в трубопроводе. При помощи автоматического толкателя приемно-отправочно станции устройство вводится в трубопpOJBOд 1. При этом включается электронный программный блок 20 управлени движения устройства, например, при помощи концевого путевого выключателя и упора, расположенных на корпусе устройства и на станке приемно-отправочной станции.
Для разгона и вывода устройства на заданный режим движения с заданно скоростью и тягой крыльчаток 4 и б от датчика 21 скорости движения и дёи:чика 24 зависания корпуса следуют управляющие сигналы, которые преобразуются в приемном устройстве блока 20 управления движением. Последний в соответствии с заданным алгоритмом управления движением формирует . команды на включение приводов механизмов 22 и 23 изменения шага лопастей крыльчаток 4 и 6 и выводит их в оптимгшьное положение для создания тяги для перемещения вдоль трубопровода в згщанном направлении .и для зависания корпуса устройства в трубопроводе 1, при этом крыльчатки 4 и 6 раскручиваются и создают тягу за счет |энергии набегающеп потока. Контроль движения и зависания устройства в
трубопроводе контролируется датчиками 21 и 24.
Одновременно в блок 20 управления движением поступают сигналы от датчиков оборотов, крыльчаток 4 и 6, который формирует команды на включение серводвигателей 15 и 16 и в следящем режиме выводит ролики вариаторов 13 и 14 скорости в положение, обеспечивающее синхронизацию оборотов крыльчаток 4 и 6 и валов 5 и 7, разъединенo ных муфтами 18 и 19 сцепления,при включении инерционного двигателя 11.
Для обеспечения заданной скорости движения и зависания корпуса устройства в трубопроводе 1 при недоста5точности энергии набегающего потока среды последовательно включаются муфты 18 и 19 сцепления к механизм включения инерционного двигателя 11. При этом вращение маховика инерционного двигателя 11 передается через
0 вал 12, вариаторы 13 и 14 скорости и валы 5 и 7 крыльчаткам 4 и б.
Электрогенератор 17 вырабатывает постоянный ток и подзаряжает аккумуляторную батарею.
5
По командам блока 20 управления движением увеличиваются обороты крыльчаток 4 и б, которые развивают принудительно дополнительную тягу за счет механической энергии инерцион0ного двигателя 11. При достижении заданной скорости движения и зависания устройства в трубопроводе системы управления движением стабилизируют режим движения устройства. При этом
5 осуществляется разгрузка трубопровода от контактных давлений колес на стенки трубопровода и снижается сопротивление трения, так как вес устройства скомпенсирован архимедовой подъемной силой , подъемной силой,
0 развиваемой корпусом и тягой крыльчатки б. Блок 20 интегрирует пройденный путь в трубопроводе.
При необходимости остановки устройства на определенный срок в за5данной точке трубопровода по командам блока 20 движением механизмами изменения шага лопастей крыльчаток изменяется их тяга до нулевого значения , а вследствие сопротивления
0 среды и силы трения колес о стенки трубопровода устройство тормозится в заданной точке.
Для возобновления движения блок 20 восстанавливает. -: прежний ре5жим движения устройства описанным способом.
По прибытии устройства на приемную станцию системы управления движением отключаются в обратной последовательности , и устройство тор0мозится за счет силы трения колес о стенки трубопровода. На станции устройство может также тормозиться за счет изменения шага лопастей крыльчатки 4 и реверсирования тяги
5
крыльчатки 4 для компенсации инерции дви ;ения.
Формула изобретения j(ycTpoftcTBO для транспортирования грузов по трубопроводам в потоке текучей среды, содержащее корпус с опорными самоцентрирующимися колесами, вертикально расположенную крыльчатку, установленную на корпусе с возможностью вращения на валу, ось которого совпадает с продольной осью корпуса, и средство для разгрузки колес, отличающе.еся тем, что, с целью снижения энергетических затрат, средство для разгрузки колес выполнено в виде дополнительной крыльчатки, вал которой установлен под углом к вгшу вертикально распог оженной крыльчатки, а внутри корпуса смонтированы электронйый блок управления и снабженный механизме включения инерционный двигатель, вал которого кинематически связан с валами крыльчаток через вариаторы скоростей , причем приводы последних .и механизм включенияинерционного двигатеЛя электрически связан с электронным блоке управления.
2.Устройство по п. 1, отличающееся тем,.что на неподвижной части верхнего самоцентрирующегося колеса установлена обмотка индуктивного датчика зависания корпуса, электрически связанная с электронным блоком управления,
3.Устройство по ПП.1 и 2, отличающееся тем, что оно снабжено датчиком скорости и механизмом изменения шага лопастей крыльчатки, привод которого электрически связан через -электронный блок управления с датчиком скорости.
4.Устройство по пп. 1-3, о тличающееся тем, что ыа валах крыльчаток установлены муфты сцепления с электромагнитными приводами , которые электрически связаны с электронным блоком управления.
Источники информации, .принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 582159, кл. В 65 3 5/00, 1975.
2.Авторское свидетельство СССР по заявке 2435563/27-11,
кл. В 65 Q 51/06, 1976.

| название | год | авторы | номер документа |
|---|---|---|---|
| Интегрированный центробежный нагнетатель - маховик | 2023 |
|
RU2803999C1 |
| УНИВЕРСАЛЬНЫЙ МНОГОФУНКЦИОНАЛЬНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ КВАДРОКОПТЕРНОГО ТИПА | 2024 |
|
RU2835704C1 |
| НАДВОДНО-ПОДВОДНЫЙ КОРАБЛЬ С ПАЛУБНЫМ АВИАЦИОННЫМ УДАРНЫМ КОМПЛЕКСОМ | 2019 |
|
RU2721808C1 |
| Устройство для перемешивания | 1978 |
|
SU931217A1 |
| Устройство для автоматического адресования объектов по кратчайшему пути | 1981 |
|
SU1025618A1 |
| ПРИВОДНОЙ КИНЕМАТИЧЕСКИЙ УЗЕЛ БЕСПИЛОТНОГО ВОЗДУШНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2114766C1 |
| Автоплан | 2020 |
|
RU2746285C1 |
| Устройство для очистки внутренней поверхности гидравлических трубопроводов | 1978 |
|
SU777394A1 |
| ДЕМПФИРУЮЩИЙ УЗЕЛ НЕСУЩИХ ВИНТОВ БЕСПИЛОТНОГО ВОЗДУШНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2117604C1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1997 |
|
RU2146010C1 |
г2
9аг:Ц
В-В
