2. Устройство по п. 1, отличающееся тем, что блок управления скоростью движения содержит реле, одно из которых выполнено с задержкой времени и в цепи питания последнего и каждого из первых реле параллельно включены замыкающие контакты реле блока управления направлением движения, в цепи питания Двух других вза,имо сблокированных реле через замыкающие и размыкающие контакты реле с задержкой времени последовательно включены контакты реле блока управления направлением движения и параллельно соединенные замыкающие и размыкающие контакты реле задатчика адресата в цепь питания одного из них последовательно в.ключены контакты реле с задержкой времени на замыкание и замыкающий контакт первого реле и параллельно соединенные замыкающие контакты блока управления направлением движения.




1. УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО АДРЕСОВАНИЯ ОБЪЕКТОВ ПО КРАТЧАЙШЕМУ ПУТИ, содержащее задатчик адреса, включающий в себя переключатель, одни из выводов замыкающих контактов которого соединены между собой, блок выбора направления движения с механизмом корректировки зоны нечувствительности, включающим в себя подвижный контакт, выполненный в виде полукруга, прикрепленного жестко к втулке с косым пазом и установленного с возможностью перекрытия по меньщей мере половины расположенных по окружности неподвижных контактов, подключенных к другим выводам замыкающих контактов переключателя, втулку с прямым пазом, жестко укрепленную на одном из концов вала и установленную с возможностью перемещения в ней подпружиненного штока с входящим в прямой паз втулки пальцем, взаимодействующим с толкателем, снабженным электромагнитом и ограничителями хода в виде концевых выключателей, замыкающие контакты которых последовательно включены в цепь питания реле блока управления направлением движения, связанным с приводом подвижных объектов, отличающееся тем, что, с целью расширения области использования и повышения точности останова, оно снабжено блоком управления скоростью движения .объекта, датчиком точного останова, дополнительными блоками выбора направления движения с механизмами корректировки зоны- нечувствительности, а задатчик адреса снабжен реле, и его переключатель выполнен с дополнительными контактами, причем подвижные контакты дополнительных блоков выбора направления движения представляют собой пластины с профилем в виде эвольвенты с десятью ступенями, расположенными с равным угловым шагом по окружности, соответственно которым по радиусу размещень неподвижные контакты, при этом начальная ступень каждого подвижного контакта выполнена с отверстием по размеру соответствующего его неподвижного контакта, а на других концах валов основного и дополнительных блоков выбора направлеi ния движения укреплены десятилопастные крыльчатки с фиксаторами, смещенные от(Л -носительно датчика точного останова на полшага размещения адресуемых объектов и взаимодействующие с соответствующими разрядам адресными пальцами, расположенными на подвесках, а на втулки с прямыми пазами механизмов корректировки зоны нечувствительности свободно насажены втулки с косыми пазами для пальцев подпружиненных штоков, неподвижные контакты блоков 1чЭ 01 выбора направления движения через дополнительные замыкающие контакты переклюО5 чателя задатчика адреса и соединенные между собой первые выводы основных замыкающих контактов и подвижные контакты бло00 ка выбора направления движения включены в цепь питания реле задатчика адреса, замыкающие и размыкающие контакты которых и размыкающие контакты датчика точного останова соединены между собой параллельно и последовательно с замьжающими контактами концевых выключателей толкателей в цепи питания реле блока управления направлением движения, через замыкающий контакт одного из которых электромагниты толкателей подключены к источнику питания и соединены параллельно.
1
Изобретение относится к автоматизации транспортно-складских механизмов и мо жет быть использовано для управления механизированными стеллажами элеваторного типа, конвейерами-накопителями, магазинами, библиотеками и т. д.
Известно устройство, содержащее задатчик адреса, выполненный в виде переключателя, подвижный контакт которого подключен к входу блока управления движением объекта, а неподвижные соединены с соответствующими входами блока выбора направления движения, включающему неподвижные контакты, размещенные по окружности, число которых равно числу позиций адресования, и подвижный контакт, выполненный в виде полукруга, замыкающий по меньщей мере половину неподвижных контактов и кинематически связанный с приводом объекта 1.
Недостаток этого устройства заключается в том, что больщая зона нечувствительности снижает надежность его работы.
Наиболее близким к предлагаемому по технической сущности и достигаемому результату является устройство, содержащее задатчик адреса, включающий в себя переключатель, одни из выводов замыкающих контактов которого соединены между собой, блок выбора направления движения с механизмом корректировки зоны нечувствительности, включающим в себя подвижный контакт, выполненный в виде полукруга, прикрепленного жестко к втулке с косым пазом и установленного с возможностью перекрытия по меньщей мере половины расположенных по окружности неподвижных контактов, подключенных к другим выводам замыкающих контактов переключателя втулку с прямым пазом, жестко укрепленную на одно из концов вала иустановленную с возможностью перемещения в ней подпружиненного щтока с входящим в прямой паз втулки пальцем, взаимодействующим с толкателем, снабженным электромагнитом и ограничителями хода в виде конеч ных выключателей, замыкающие контакты которых последовательно включены в цепи питания реле блока управления направлением движения, связанным с приводом подвижного объекта 2.
Известное устройство имеет ограниченную область использования, его работа возможна только лищь при небольщом количество адресных подвижных объектов (подвесок). При увеличении количества адресных подвесок пропорционально увеличивается количество коммутирующих элементов в задатчике адреса и блоке выбора
Q направления движения. Это увеличивает габариты устройства, и, например, при наличии на транспортном средстве 1000 адресных объектов (подвесок) такое устройство в конструктивном отнощении становится практически нереальным и экономически
5 неоправданным.
Недостаточно, высокая точность адресования вызвана наличием масштабного механизма, в котором имеет место накопление ощибок в промежуточных звеньях транспортной системы.
0 Кроме того, сложна конструкция механизма корректировки зоны нечуствительности, отсутствует возможность плавного пуска и остановка привода подвижных объектов, в результате чего возникают резкие рывки и раскачивания подвесок (адресных объектов ), что приводит к перегрузкам транспортной системы и аварийным ситуациям.
Цель изобретения - расщирение области использования устройства и повыще0 нир точности останова.
Поставленная цель достигается тем, что устройство, содержащее задатчик адреса, включающий в себе переключатель, одни из выводов замыкающих контактов которого соединены между собой, блок выбора направления движения с механизмом корректировки зоны нечувствительности, включающим в себя подвижный контакт, выполненный в виде полукру-га, прикрепленного жестко к втулке с косым пазом и установленного
с возможностью перекрытия по меньщей
мере половины расположенных по окружности неподвижных контактов, подключенных к другим выводам замыкающих контактов переключателя, втулку с прямым пазом, жестко укрепленную на одном из концов вала и установленную с возможностью перемещения в ней подпружиненного штока с входящим в прямой паз втулки пальцем, взаимодействующим с толкателем, снабженным электромагнитом и ограничителями хода в виде концевых выключателей, замыкающие контакты которых последовательно включены в цепь питания реле блока управления направлением движения, связанным с приводом подвижных объектов, снабжено блоком управления скоростью движения объекта, датчиком точного останова, дополнительными блоками выбора направления движения с механизами корректировки зоны нечувствительности, а задатчик адреса снабжен реле и его переключатель выполнен с дополнительными контактами, причем подвижные контакты дополнительных блоков выбора направления движения представляют С9бой пластины с профилем в виде эвольвенты с десятью ступенями, расположенными с равным угловым щагом по окружности, соответственно которым по радиусу размещены неподвижные контакты, при этом начальная ступень каждого подвижного контакта выполнена с отверстием по размеру соответствующего ему неподвижного контакта, а на Других концах валов основного и дополнительных блоков выбора направления движения укреплены десятилопастные крыльчатки с фиксаторами, смещенные относительно датчика точного останова на полщага размещения адресуемых объектов и взаимодействующие с соответствующими разрядам адресными пальцами, расположенными на подвесках, а на втулки с прямыми пазами механизмов корректировки зоны нечувствительности свободно насажены втулки с косыми пазами для пальцев подпружиненных штоков, неподвижные контакты блоков выбора направления движения через дог(олнительные замыкающие контакты переключателя задатчика адреса и соединенные между собой первые выводы основных замыкающих контактов и подвижные контакты блока выбора направления движения включены в цепь питания реле задатчика адреса, замыкающие и размыкающие контакты которых и размыкающие контакты датчика точного останова соединены между собой параллельно и последовательно с замыкающими контактами концевых выключателей толкателей в цепи питания реле блока управления направлением движения, через замыкающий контакт одного из которых электромагниты толкателей соединены параллельно и подключены к источнику питания.
Кроме того, блок управления скоростью движения содержит реле, одно из которых выполнено с задержкой времени и в цепи питания последнего и каждого из первых реле параллельно включены замыкающие контакты реле блока управления направлением движения, в цепи питания двух других взаимно сблокированных реле через закающие и размыкающие контакты реле с задержкой времени последовательно включены контакты реле блока управления направлением движения и параллельно соединенные замыкающие и размыкающие контакты реле задатчика адреса, а в цепь питания одного из них последовательно включены контакты реле с задержкой времени на замыкание и замыкающий контакт первого реле и параллельно соединенные замыкающие контакты блока управления направлением движения.
На фиг. 1 показаны кинематическая схема взаимодействия блоков выбора направления д.вижения непосредственно с соответствующими адресными объектами (подвесками) и электрическая связь неподвижных контактов (бесконтактных датчиков) блоков выбора направления движения с реле через замыкающие контакты переключателя
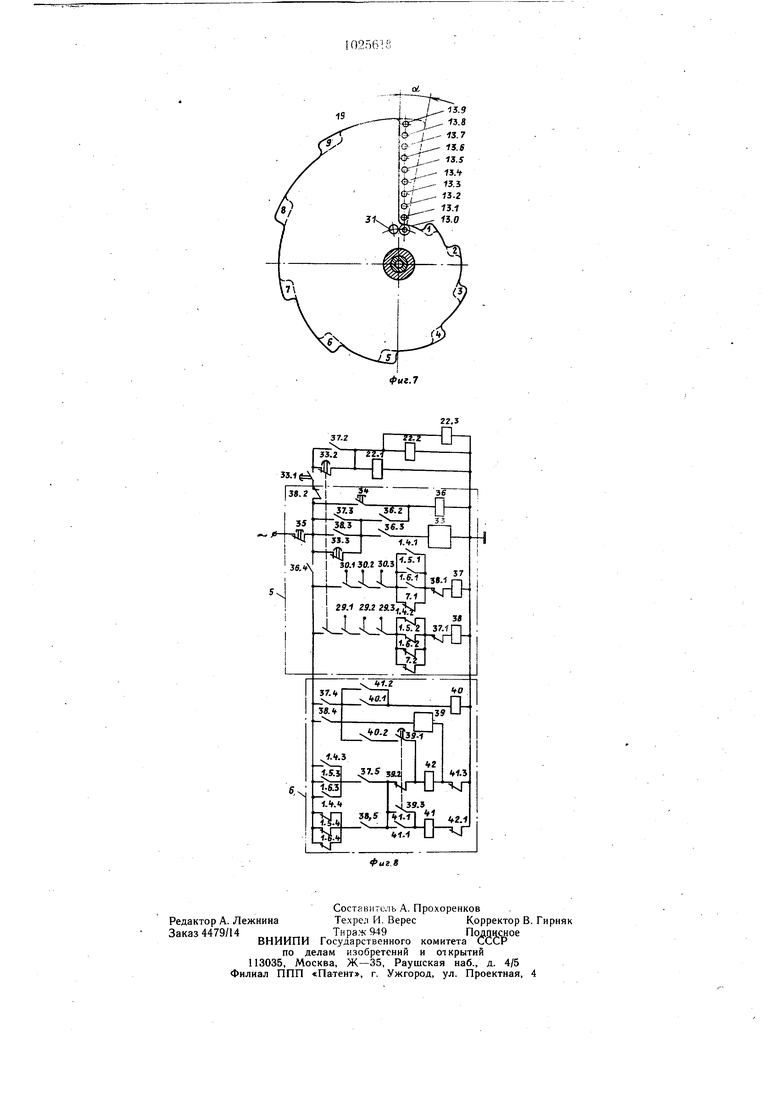
задатчика адреса; на фиг. 2 - блок выбора направления движения; на фиг. 3 - вид А на фиг. 2 (десятилопастная крыльчатка приводного вала блоков выбора направления движения); на фиг. 4 - разрез Б-Б на фиг. 2 (подвижный контакт в виде полукруга с круговым расположением неподвижных контактов (бесконтактных датчиков) блока выбора направления движения с цифровыми номерами высшего десятичного раз ряда и схематическое изображение угла л корректировки зоны нечувствительности);
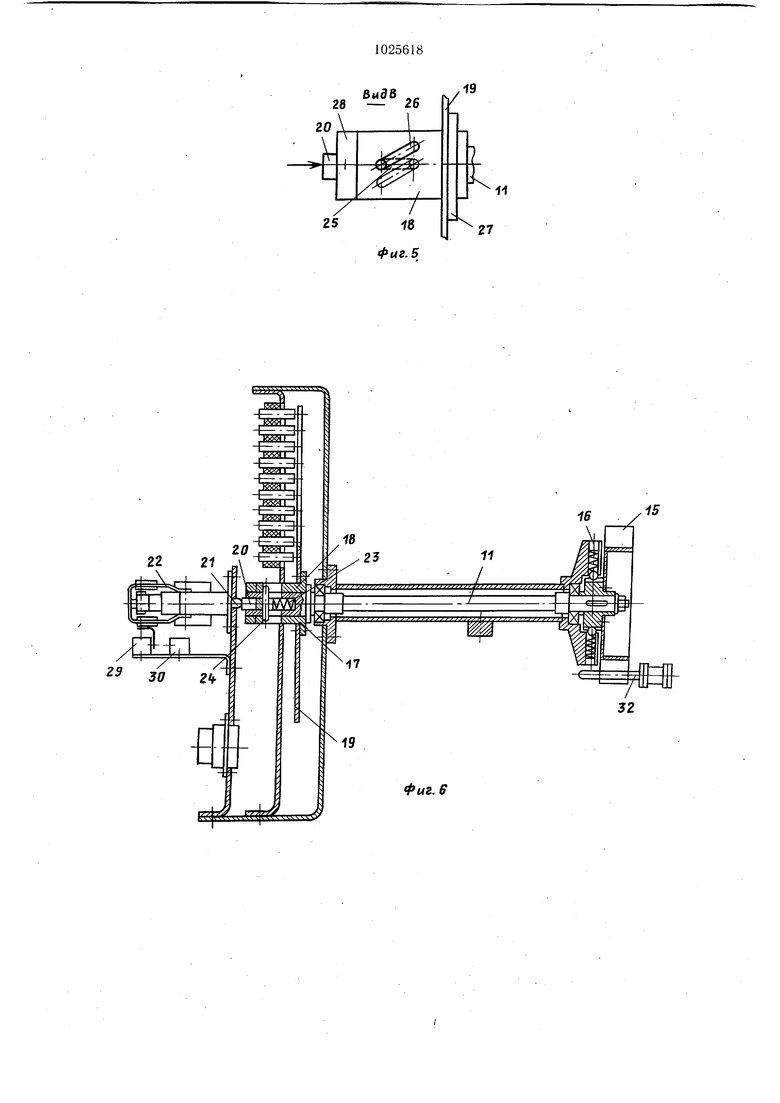
на фиг. 5 - вид В на фиг. 2 (механизм корректировки зоны нечувствительности) а фиг. 6 - дополнительный блок выбора направления движения; на фиг. 7 - подвижный контакт в виде пластины с профилем в виде эвольвенты и радиальным расположением неподвижных контактов (бесконтактных датчиков) блока выбора направ ления движения; на фиг. 8 - электрическая схема управления устройства.
Устройство содержит (фиг. 1) задатчик адреса, включающий в себя переключатель 1.1 с замыкающими контактами 1.1..1.9, переключатель 1.2 с замыкающими контактами 1.2.0-1.2.9, переключатель 1.3 с замыкающими контактами 1.3.0-1.3.9 и реле 1.4-1.6, блок 2 выбора направления
движения с механизмом 2.1. корректировки зоны нечувствительности, блок 3 выбора направления движения с механизмом 3.1 корректировки зоны нечувствительности, блок 4 выбора направления движения с механизмом 4/1 корректировки зоны нечувствительности, блок 5 управления направлением движения, блок 6 управления скоростью объекта и датчик 7 точного останова. Блок 4 выбора направления движения, относящийся к разряду сотен, содержит (фиг. 2) корпус 8. на котором в подшипниках 9 и 10 помещен приводной вал 11, а относительно его оси на кронштейне 12 по окружности с равным угловым шагом расположено десять неподвижных контактов. например бесконтактных датчиков 13.0 13.9 и на кронштейне 14 установлен механизм 4.1 корректировки зоны нечувствительности. На одном конце приводного вала 11 жестко закреплена десятилопастная крыльчатка 15 с пронумерованными крыльями, имеющая фиксатор 16 ее десяти положений, а на второй конце - втулка 17, на которую насажена втулка 18 с жестко прикрепленным к ней полукруглым подвижным контактом 19, взаимодействующим, например, через воздушный зазор с неподвижными контактами (бесконтактными датчиками) 13.0-13.9 и перекрывающим половину из них, а именно 13.0-13.6 (фиг. 1). Механизм 4.1 состоит из .штока 20, помещенного во втулку 17 приводного вала Г1 и соединенного Одним концом с толкателем 21, снабжённым электромагнитом 22, а вторым концом- с возвратной пружиной 23. На штоке 20 сидит палец 24, выходящий наружу через горизонтальный паз 25 втулки 17 и косой паз 26 свободно сидящей втулкн 18 с подвижным контактой 19. Втулка 18 имеет ограничители 27 и 28 продольного смещения относительно втулки 17, а шток 20 - огра ничители хода в виде концевых выклю чателей исходного 29 и рабочего 30 полежений, т. е, ограничители угла повороти подвижного контакта относительно вала И или угла rt корректировки зоны нечувствительности.Блоки 2 и 3 выбора направления движения младших десятичных разрядов конструктивно выполнены так же, как н блок 4, за исключением лишь того, что их подвижные контакты 19 (фиг. 6 и 7) представляют собой пластины с профилем в виде эвольвенты с десятью ступенями, расположенными с равным угловым шагом по окружности, соответственно которь1м по радиусу размещены неподвижные контакты (бесконтактные датчики) 13.0-13.9. Нулевые ступени подвижных контактов 19 имеют сугверстия 31,выполненные по размерам соответствующих им неподвижных контактов (бесконтактных датчиков) 13.0 и смещенные относительно их на угол, равный корректировки зоны нечувсГвительности. Блок 4 посредством соответствующей крыльчафки 15 взэт, имодействует непосредственно с адресными : объектами (подвесками) с цифровыми номерами «000, 100, ..., 900 высщего десяти-: чного разряда через выступающие из них на расстояние За соответствующие пальцы, 32.Блок 3 посредством соответствующей крыльчатки 15 взаимодействует непосредственно с адресными объектами (подвесками) с цифровыми номерами 4|00, 10,.., 90 младшего десятичного разряда .через выступающие из них на расстояние 2в соответствующие пальцы 32, а также со всеми пальцами вышеуказанных адресных объектов (подвесок) с цифровыми номерами самого старшего десятичного разряда. .Блок 2 посредством соответствующей крыльчатки 15 взаимодействует непосредственно с адресными объектами (подвесками) с цифровыми номерами «0,1..,,9 самого младшего десятичного разряда через .выступающие из них на расстояние 1в cooтвeтctвyk)щиe пальцы 32, а также со всеми пальцами остальных адресных объектов (подвесок). Адресные объекты (подвески) распо;1ожены на транспортном средстве по замкнутому кругу с шагом а и все они взаимодействуют ( распрложенным у разгрузочного окна датчиком 7 точного останова, относительно которого блоки 2-4 выбора направления движения смещены на полшага а/2 с возможностью обеспечения опережения их взаимодействия с выступающими пальцами 32 соответствующих адресных объектов (подвесок) при нх перемещении как в одном, так в другом направлениях. Неподвижные контакты (бесконечные датчики) 13.0 - 13.9 блоков 2-4 через соответствующие контакты 1.1.0-1.1.9, 1.2.0-1.2.9 и 1.3.0- 1.3.9 задатчика 1 адреса, например, в виде клавишного переключателя включены в цепи питания реле 1.4-1.6. Блок 5 управления направлением движения объектов включает в себя программное реле 33 . (фиг. 8) последовательности включения исполнительных Команд с замыкаю-, щим и размыкающим контактами 33.1 - 33.3, кнопки «Пуск 34 и «Стоп 35, соединенные с пусковым реле 36, имеющим контакты 36.1-36.4, реле 37 команды «Назад с контактами 37.1-37,6 и реле 38 команды «Вперед с контактами 38.1-38.5, причем в цепи питания реле 37 замыкающие контакты 1.4.1, 1.5.1 и 1.6.1 реле 1.4, 1.5 н 1,6 и размыкающий контакт 7 1 датчика 7 точного останова соединены между собой параллельно, а замыкающие контакты конце-, вых выключателей 30.1, 30.2 и 30.3 (рабочего положения) ограничения хода штоков 20 соответствующих механизТйов 2.1, 3.1 И 4.1 корректировки зоны нечувствительности соединены последовательно, а в цепи питания реле 38 размыкающие контакты: 1.4.2, 1.5.2 и 1.6.2 реле 1.4, 1.5 и 1.6 и размыкающий контакт 7.2 датчика 7 точного останова также соединены между собой параллельно, а замыкающие контакты концевых выключателей 29.1, 29.2 н 29.3 (исходного положения) ограничения хода штоков 20 соединены между собой последовательно. Электромагниты 22.1, 22.2 и 22.3 толкателей 21 соединены между -собой параллельно и ПоДключеньГ к источнику питания через замыкающий коитакт 33.1 программного реле 33. Блок 6 управления скоростью объекта включает в себя реле 39 (Фиг. 8) времени интервала плавного пуска н инерционного выбега с замыкающими и размыкающим с задержкой времени контактами 39.1-39.3 реле 40 управления плавным остановом с замыкак щими контактами 40.1 и 40.2, реле -41 управления большой скоростью с
замыкающим и .размыкающим контактами 4.1-41.3, реле 42 управления малой скоростью с размыкающим контактом 42.1. Устройство рабЬтает следующим образом, Пусть перед разгрузочным окном расположен адресный объект (подвеска) с цифровым номером «000 (фиг. 1), который находится во взаимодействни с датчиком 7 точного останова (размыкающие контакты 7,Г и 7,2 разомкнуть) крыльчатки 15 соответствующих блоков 2-4 своими лопастями, обозначеннымн цифрой «О, обращены перпендикулярно к выступающим пальцам 32, их неподвижные контакты (бесконтактные датчики) 13.0, перекрыты подвижными контактами 19 в виде эвольвенты, а неподвижные контакты (бесконтактные датчики) 13.6-.13.9 и 13.0 - подвижным контактом 19 в виде полукруга.
Например, к окну разгрузки необходимо доставить адресный объект (подвеску) с цифровым номером «998 для чего На переключателе 1.1 разряда единиц посредством клавищи с цифрой «8 замыкается контакт 1.1.8, подключая неподвижный контакт (бесконтактный датчик) 13.8 к 1.4; на переключателе 1.2 разряда десятков посредством клавищи с цифрой «90 замыкается контакт 1.2.9, подключая неподвижный контакт (бесконтактный датчик) 13.9 к реле 1.5, и наконец, на переключателе 1.3 разряда сотен посредством клавишя с цифрой «9100 замыкается контакт 1,3.9, подклй ая неподвижный контакт бесконтакт1 ый датчик) 13.9 к реле 1.6..Затемкнопкой «Пуск 34 включается реле 36, которое
своим замыкающим контактом 36.Г включает питание реле 1.4-1,6 и подключенных к .ним бесконтактных датчиков 13.8, 13.9 и 13.9, контактом 36.2 становится на самоблоки ровку,и контактом 36.3 включает питание программного реле 39, контактом 36.4 подготавливает цепи включения реле 37-42. Реле 33 после определенной выдержки времени сначала своим контактом 33.1 включает электромагниты 22.1-22.3, которые синхронно на всех блоках 2-4 с помощью соответствующих толкателей 21, преодолевая усилия возвратных пружин 23, перемещают штоки 20 в крайнее рабочее положение, в результате чего толкатели 21 воздействуют на концевые выключатели 30. Одновременно щтоки 20 соответствующих механизмов 2.1, 3.1 и 4.1 смещают сидящие на них пальцы 24 вдоль продольных пазов 25 втулок 17 приводных валов П и за. счет наличия косых пазов 26 смещают свободно сидящие втулки 18 и жестко соединенные с ними контакты 19 относительно валов П на угол ft-, корректировки зоны нечувствительности. Подвижные контакты 19 блоков и 3 разряда единиц н разряда десятков, сместивщись на угол А перекрывают нёпод вижиые контакты (бесконтактные датчнкн) 13.1 - 13.9, а датчики 13.0 находятся точно напротив отверстий 31. Одновременно подвижный контакт 19 блока 4 разряда сотен, сместившись иа угол л, освобождает от перекрытия неподвижный контакт (бесконтактный датчик) 13.0. Замыкаются контакты контактных выключателей 30.1; 30.2 и 30.3 и включают реле 1.4; 1,5 и 1,6, которые своими замыкающими контактами 1.4.1, 1.5,1 и 1.6.1 включают реле 37 команды «Назад, замыкающими контактами 1.4.3, 1.5.3 и 1.6.3 подготавливают цепь включения реле 42 управления малой скоростью. Реле 37 контактом 37.2 шунтирует контакт 33.2 программного реле 33, контактом 37.3шунтирует Цепь отключения пускового реле 36, контактом 37.4 включает реле 39 длитёльности времени плавного пуска и контактом 37.5 включает реле 42 управления малой скоростью привода перемещения объектов (не показан). Объекты (подвески) начинают плавно перемещаться по направлению стрелки Н «Назад относительно разгрузочного окна. Программное реле 33 после истечения определенной выдержки времени сначала включает контакт 33.2, а затем контакт 33.3, подготавливая цепи отключения электромагнитов 22.1-22.3 и реле 33 и 36. Реле 39 после истечения заданной выдержки
времени, например, равной или несколько большей времени прохождения пунктов адресных объектов (подвесок) в размере половины шага (а/2), своим контактом 39.2 отключает реле 42 управления малой скоростьк), а контактом 39.3 включает реле 41
управления большой скоростью, которое в свою очередь, контактом 41.2 включает реле 40. при этом последнее своим контактом 40.2 подготавливает цепь включения реле 42. Запрашиваемый адресный объект (подвеска) с цифровым обозначением «998 начинает ускоренно приближаться к пункту назначения, т. е . к разгрузочному окну. Адресные объекты (подвески) сЦифровыми номерами «10, «100, «000) (аналогично IDOO), перемещаясь по направлению стрелки Н «Назад через полшага (а/2), всту: пают во взаимодействие посредством своих выступающих пальцев 32 с лопастями (обозначенными цифрой «О) крыльчаток 15 соответствующих блоков 2-4, в результате чего указанные крыльчатки одновременно
поворачиванэтся на 1/10 оборота и удержираются в этом положеини с помощью coot--; 1зетствующих фиксаторов 16, т. е. на Место ранеерасполагаемых лопастей, обозначенных цифрой «О, становятся лопасти, обоз-наченные цифрой «9. Одновременно подвиж
ные контакты 19 блоков 2-4 посредством приводных валов 11 также поворачиваются на 1/10 оборота, тем самым освобождают неподвижные контакты (бесконтактные датчики) 13.9, следовательно, отключаются реле 1.5 н 1.6. Однако движение объектов
; (подвесок) продолжается и при подходе запрашиваемого адресного объекта (подвески) «998 к пункту назначения, он за полшага (а/2) посредством своего выступающего пальца 32 взаимодействует с лопастью «9 крыльчатки 15 блока 2 и переводит ее на 1/10 оборота, устанавливая на ее место лопасть, обозначенную цифрой «8, а остальные крыльчатки 15 блоков 3 и 4 находятся в покое. Одновременно подвижный контакт 19 блока 2 посредством приводного вала 11 также поворачивается на 1/10 оборота, в результате чего освобождается- неподвижный контакт (бесконтактный датчик) 13.8 и отключается реле 1,4, которое своим контактом 1.4.3 обесточивает реле 41 и 42 управления большой и малой скоростями. Контактами 1.4.1, 1.5.1 и 1.6.1 под готавливается цепь отключения реле 37. Запрашиваемый адресный объект (подвеска) «998 по инерции приближается к пункту назначения, снижая скорость. Одновременно через контакт 41.3 включается реле 39 времени интервала инерционного выбега. После истечения заданной выдержки времени (достаточной для гашения большой скорости во время инерционного выбега до уровня малой скорости) реле 39 замыкак)ш,им контактом 39.1 включает реле 42 управления малой скоростью. Запрашиваемый адресный объект (подвеска) «998 после инерционного выбега продолжает перемеш,аться на малой скорости, исключая резкие рывки, и при прибытии к разгрузочному окну взаимодействует с датчиком 7 точного останова, который своим контактом 7.1 мгновенно дает команду на отключение реле 37 Отключается привод перемещения подвижных объектов (не показан), а также электромагниты 22.1-22.3 механизмов 2.1, 3.1. и 4.1 корректировки зоны нечувствительности и за счет соответствующих возвратных, пружин 23 возвращаются в исходное положение. Их толкатели 21 воздействуют на концевые выключатели 29, а подвижные контакты 19 становятся в нормальное положение, исключая при этом угол а. корректировки зоны нечувствительности.
Если же к разгрузочному окну необходимо, например, доставить адресный объект (подвеску) с цифровым номером «002 в то время когда у него находится адресный объект (подвеска) с цифрорым номером «000 (фиг. 1), то необходимо на переключателе 1.1 разряда единиц посредством клавиши с цифрой «2 замкнуть контакт 1.1.2 подключая неподвижный контакт (бесконтактный датчик) 13.2 к реле 1,4; на переключателе 1.2 разряда десятков -посредством клавиши с цифрой «00 замыкается контакт 1.2.0, подключая датчик 13.0 блока 3 к реле 1.5, и, наконец, на переключателе 1.3 разряда сотен посредством клавиши с цифрой «000 замыкается контакт 1.3.0 подключая датчик 13.0 блока 4 к реле 1.6. Затем кнопкой «Пуск 34 включается реле 36. Аналогично вышеописанному сначала включается питание реле 1.4-1.6 и опра-шивается состояние взаимодействия заадресованных неподвижных контактов (бесконтактных датчиков) 13.2 и 13.0 с соответствующими подвижными контактами 19, после чего включаются электромагниты 22 механизмов 2.1, 3.1 и 4.1 корректировки зоны нечувствительности и концевые выключатели 30. Однако включение реле 37 команды «Назад не произойдет, так как после ввода угла OU корректировки зоны нечувствительности заадресованный неподвижный контакт (бесконтактный датчик) 13.2 блока 2 будет перекрыт соответствующим подвижным кон тактом 19. Заадресованный неподвижный контакт (бесконтактный датчик) 13.0 блока 3 попадает в проем окна 31 соответствующего подвижного контакта 19. Заадресованный неподвижный контакт (бесконтактный датчик) 13.0 блока 4 оказывается неперекрытым соответствующим подвижным полукруглым контактом 19.
После определенной вьщержки времени программное реле 33 размыкающим контактом 33.2 отключает электромагниты 22.1: 22.2 и 22.3 механизмов 2.1, 3.1 и 4.1 корректировки зоны нечувствительности, в результате чего они возвращаются в исходное положение и воздействуют на концевые выключатели 29, а подвижные контакты 19 блоков 2.1.4.1, исключая угол корректировки зоны нечувствительности, возвращаются в первоначальное положение и перекрывают заадресованные неподвижные контакты (бесконтактные датчики) 13.0 за исключением неподвижного контакта (бесконтактного датчика) 13.2 блока 2. Включаются реле 1,5 и 1.6. Кроме того, включается дат чик 7 точного останова, так как он находится во взаимодействии с выступающим пальцем 32 адресного объекта (подвески) с цифровым номером «обо, расположенного в этот момент у окна разгрузки. Замыкающий контакт 33.1 программного реле 33 включает реле 38 команды «Вперед, так как в это время замкнуты контакт 1.4.2 реле 1.4 и контакты концевых выключателей 29,1, 29.2 и 29.3. Запращиваемый адресный объект (подвеека) «002 начинает перемещаться по направлению стрелы В «Вперед по заданной программе, аналогично вышеописанной: плавный пуск - быстрая доставка запрашиваемого объекта (подвески) по кратчайшему пути - заблаговременное за полшага до прибытия в пункт назначения отключение большой скорости - инерционный выбег - плавный останов на малой скорости. В данном случае особенностью является лишь то, что крыльчатки 15 блоков 3 и 4 старших дасятичных разрядов находились в покое, так как они расположены стационарно относительно подвижных объектов на расстоянии пропорционально размерам 2в и 30, т. е. расположены дальше, чем блок 2 самого младшего десятичного разряда (разряда единиц), поэтому проходящие мимо их выступающие на незначительное расстояние 1в пальцы 32 адресных объектов (лодвесок) с цифровой нумерацией разряда единиц не вступают во взаимодействие с крыльчатками 15 блоков 3 и 4 старших разрядов, а взаимодействуют только с крыльчаткой 15 блока 2. Сначала вступает во взаимодействие с ней палец адресного объекта (подвески) с цифровым номером «001, а затем палец адресного объекта (подвески) с цифровым номером «002 и переводит лопасть, обозначенную цифрой «2, на место, ранее занимаемое лопастью, обозначенной цифрой «О. Соответствующий подвижный контакт 19 блока 2 перекрывает неподвижный контакт (бесконтакт ный датчик) 13.2, который дает команду на включение промежуточного реле 1.4, при этом его контакты 1.4.2 и 1.4.4 размыкаются, отключают реле 41 и 42 управления большой и малой скоростями, а также заблаговременно подготавливает цепь отключения реле 38. По прибытию запрашиваемого адресного объекта (подвески) с цифровым номером «002 в пункт назначения палец вступает во взаимодействуие с датчиком 7 точного останова, который контактом 7.2 размыкает цепь питания реле 38 команды «Вперед. Запрашиваемый адресный объект (подвеска) с цифровым номером «002 точно останавливается напротив разгрузочного окна. Все исполнительные механизмы и схема управления возвращаются в исходное положение, подготавливая электрические цепи для обеспечения вызова и реализации доставки следующих необходимых адресных объектов (подвесок) в пункт назначения. Предлагаемое устройство позволяет сократить число коммутирующих элементов, повысить надежность и удобство эксплуатации.
15
фиг. 3
Фиг.Ч
28
25
27
Фаг. В
Фиг. 6
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для автоматического адресования объекта по кратчайшему пути | 1974 |
|
SU578241A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Устройство для автоматического адресования объекта по кратчайшему пути | 1980 |
|
SU943149A2 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
