I
Изобретение относится к области техники автоматического измерения искривлений жес,тких проводников в вертикальных шахтных стволах, касается, в частности, основного элемента подобных устройств - каретки (тележки) и может быть использовано в приборах дискретного действия.
Известно устройство для автоматического нивелирования и записи профиля, рельсовых путей, в котором маятниковые датчики зенитных углов размещены на каретке, имеющей мерное колесо, катящееся по рельсовому проводнику 1. Одним из недостатков конструкции является то, что из-за неточности изготовления несущих колес, а также расположения подвеса маятника на некотором расстоянии от ее оси появляется ощибка измерения зенитных углов и, следовательно, величин относительных отклонений проводников на ярусах армирования, соизмеримая с точностью самого прибора.
Известна тележка для регистрации параметров автомобильных дорог, у которой длина базы (расстояние между точками опоры рамы на щарниры тандемов) равна утроенной длине волны неровности дорожного покрытия, а расстояние между осями
колес равно половине длины волны 2. Этим обеспечивается точное воспроизведение геометрии автомобильной дороги без восприятия колебаний от неровностей на ней.
Однако такая конструкция не решает вопроса ликвидации колебаний оси фермы тележки с расположенными на ней датчиками при наличии эксцентриситетов несущих колес, и, следовательно, принцип устройст10ва ее не может быть использован в приборах измерения искривлений проводников, где требуется строгая параллельность продольной оси тележки каждому участку проводника, на котором в данный момент она находится.
15
Наиболее близкой по назначению, технической сущности и конструктивному решению к изобретению является каретка, применяемая в приборах типа СМ, предназначенных на измерения искривлений жестких
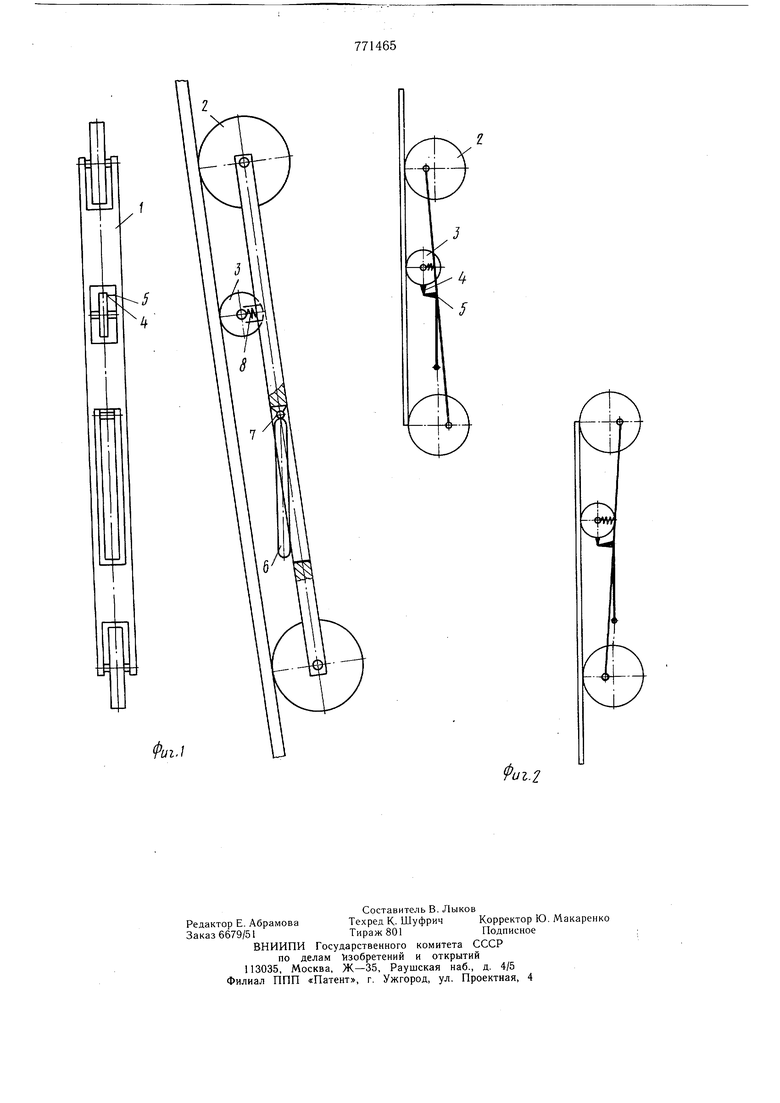
20 проводников в вертикальных шатных стволах 3J. Каретка, на которой размещен :, датчики зенитных углов, движется по проводнику при помощи двух несущих колес. Для подобных конструкция максимальная величина ошибки измерения зенитных углов L из-за неточности изготовления колес (наличия эксцентриситета) может быть записана в виде Ao( где f-i -эксцентриситет первого и второго несущих колес; SQ - длина базы каретки. Для уменьшения АЫдлина базы каретки выбрана равной SQ 1,8 м. Однако выбор базы указанной длины привел к тому, что каретка не повторяет искривления проводников на изгибах («срезает углы), что увеличивает общую погрешность измерений при бора. Кроме этого, точка подвеса датчика зенитных углов не совмещена с продольной осью базы каретки, а находится от нее на некотором расстоянии . Амплитуда V и частота со качания подвеса маятника из-за наличия эксцентриситета несущих колес определяется по формулам: v .и Д(7,л- V. V -к - - ii а ьсо - о , где V - скорость движения каретки по проводнику, R -радиус мерного колеса. При движении каретки по проводнику из-за наличия 6, и подвес маятника колеблется в вертикальной плоскости, вызывая увод центра масс маятника от положения равновесия в горизонтальном направ лении .за счет перекачки энергии одного вида колебаний в другой. Появляется дополнительная погрещность измерения углов, ограничивающая скорость прокатки каретки по проводнику. Целью изобретения является повышение точности измерения искривлений проводинков. Указанная цель достигается тем, что радиусы мерного и несущих колес выбраны такими, чтобы половина длины окружности несущего колеса равнялась длине базы каретки, а длина окружности мерного колеса была равной или кратной длине базы каретки, при этом точка подвеса маятника располагается на продольной оси рамы каретки. Выбор радиуса мерного колеса таков, чтобы с Гг - U где п - целое число, обеспечивает фиксацию (отсчет) участков проводника, равных по длине базе каретки. Радиусы несущих колес R выбирают такими, чтобы Sct 3d. что обеспечивает изменение знака погреЩности А на противоположный на каждом последующем фиксированном участке относительно предыдущего. Совмещение же точки подвеса маятника с продольной осью рамы каретки исключает колебания точки подвесного в вертикальной плоскости, а, следовательно, и увод центра масс маятника от отвесного положения, чем обеспечивается возможность увеличения скорости прокатки каретки по проводнику. На фиг. 1 показана схема каретки; на фиг. 2 - положения каретки при самом неблагоприятном расположении эксцентриситетов , и . несущих колес в моменты двух последовательных отсчетов зенитных углов, когда путь, пройденный кареткой равен длине ее базы SQ,Каретка содержит раму 1 с установленными на ней несущими колесами 2 и мерным колесом 3. Мерное колесо 3 снабжено контактными выступами 4, число которых соответствует п, т. е. кратности длины окружности мерного колеса длине базы каретки. Контактные выступы расположены с разным интервалом на одной окружности. На раме 1 укреплен ответный контакт 5. Несущие колеса 2 служат для перемещения каретки по проводнику, а мерное колесо - для фиксации участков проводника, равных длине базы каретки. Маятниковый датчик углов наклона 6 укреплен на раме 1 между несущими колесами 2 так, чтобы ось подвеса совпадала с продольной осью рамы 1, Цилиндрический шарнир 7, на котором подвешен маятник 6, позволяет отклоняться ему только в одной плоскости. Постоянный контакт мерного колеса 3 с проводником обеспечивается поджатием пружин 8. Каретка является основным элементом автоматического устройства измерения искривлений проводников. При прокатке ее по проводнику с помощью датчика зенитных углов 6 и мерного колеса 3, соединенных кабелями с аппаратурой, расположенной на подъемном сосуде, производится фиксация участков проводника, равных длине базы каретки, путем замыкания контактов 4, 5 и измерение угла наклона этих участков к вертикали. В момент фиксации участков проводника импульсом, снимаемым с контактов 4, 5 запускается преобразователь углового положения каретки, вырабатывающий импульс, длительность которого пропорциональна величине измеренного угла на длине базы Sq. .Преобразователь управляется сигналом, снимаемым с датчика зенитных углов 6. Импульсы преобразователя заполняются от генератора опорных импульсов короткими Счетными импульсами. Подсчет счетных импул асов в пределах каждого яруса армировки производится реверсивными счетчиками, а регистрация результатов измерений - цифропечатающим устройством. Так как величина отклонения каждого фиксированного участка xi пропорциональна измеренному зенитному углу
L
X I
то величина искривления проводника на каждом шаге армировки h (отклонение проводника на последующем ярусе относительно его же положения на предыдущем) находится как сумма отклонений от вертикали фиксированных участков:
l. ,
п
где
So
Из-за неточности изготовления несущих колес (наличие эксцентриситета) ее продольная ось практически никогда не будет параллельной рабочей поверхности проводника. В силу этого зенитные углы (углы наклона каретки к вертикали), измеряемые маятниковым датчиком, не будут равны углам наклона участков проводника к вертикали. Погрешность измерения зенитных углов Л а, суммируясь вместе с углами, даст ошибку измерения относительных отклонений. В предлагаемой каретке за счет того, что радиусы несущих колес R выбраны такими, чтобы Sof iiR, на каждом последующем участке проводника погрешность Ао( изменяет свой знак на противоположный. В результате суммирования погрешностей
Да с изменяющимися знаками максимальная ошибка измерения относительных отклонений не будет превышать 0,04 мм (для 7 кл. точности изготовления несущих колес) т. е. предлагаемая конструкция каретки позволяет уменьшить ошибки измерений искривлений проводников от вертикали, вызванные неточностью изготовления несущих колес и расположением подвеса маятника на некотором расстоянии от продольной оси каретки.
Формула изобретения
Каретка для измерения искривлений жестких проводников, содержащая раму, несущие колеса, маятниковый датчик углов наклона и мерное колесо, отличающаяся тем, что, с целью повышения точности измерения, точка подвеса маятника датчика уголов наклона расположена на продольной оси рамы каретки, при этом половина длины окружности несущего колеса равна длине базы каретки, а длина окружности мерного колеса равна или кратна длине базы каретки.
Источники информации,
принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 195132, кл. G 01 С 7/04, 24.11.66.
2.Авторское свидетельство СССР № 309237, кл. G 01 С 7/04, 23.12.69.
3. Инструкция по эксплуатации СИ-1. ВНИМИ. Л., 1973.
i/гЛ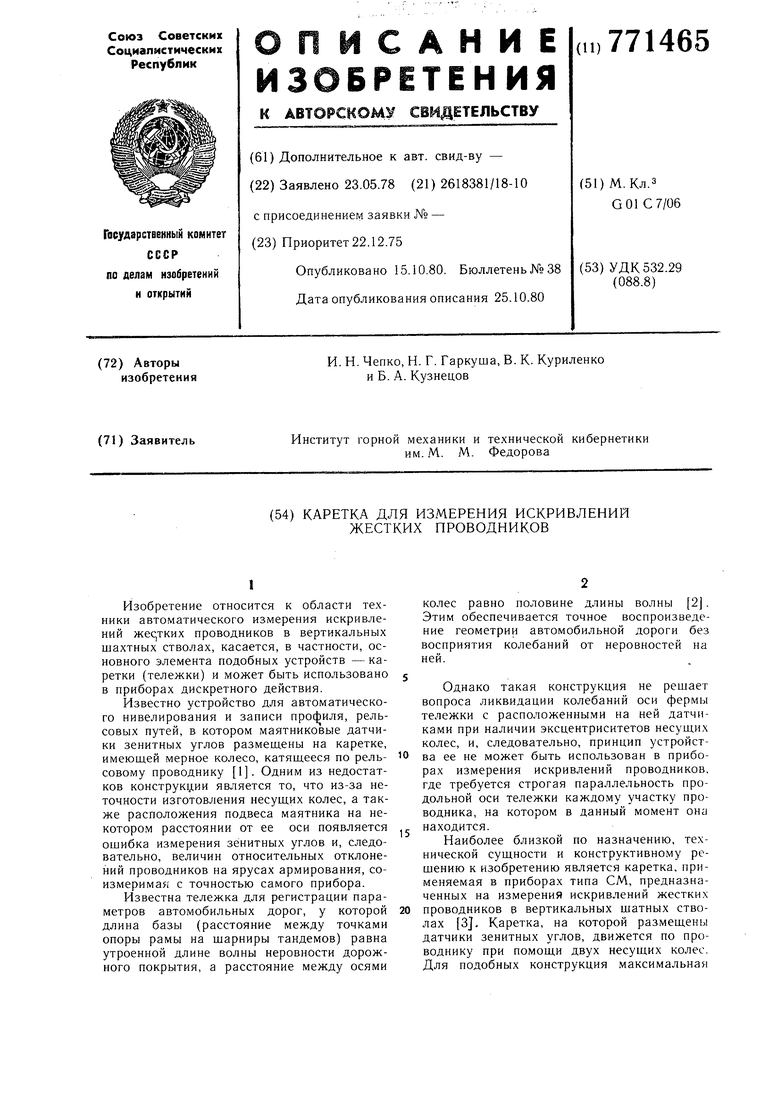
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматическогоизМЕРЕНия ВЕличиН иСКРиВлЕНий жЕСТКиХпРОВОдНиКОВ | 1978 |
|
SU794207A2 |
| Устройство автоматического измерения величин искривлений жестких проводников | 1975 |
|
SU577291A1 |
| Инклинометр | 1983 |
|
SU1134705A1 |
| Инклинометр | 1982 |
|
SU1082939A1 |
| БЛОК ИНКЛИНОМЕТРИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ | 2007 |
|
RU2359121C1 |
| Инклинометр | 1978 |
|
SU798279A1 |
| ПЕРЕМОТЧИК КАБЕЛЯ | 2006 |
|
RU2317240C1 |
| Инклинометр | 1984 |
|
SU1194995A1 |
| Инклинометр | 1983 |
|
SU1099061A1 |
| Инклинометр | 1976 |
|
SU868056A1 |