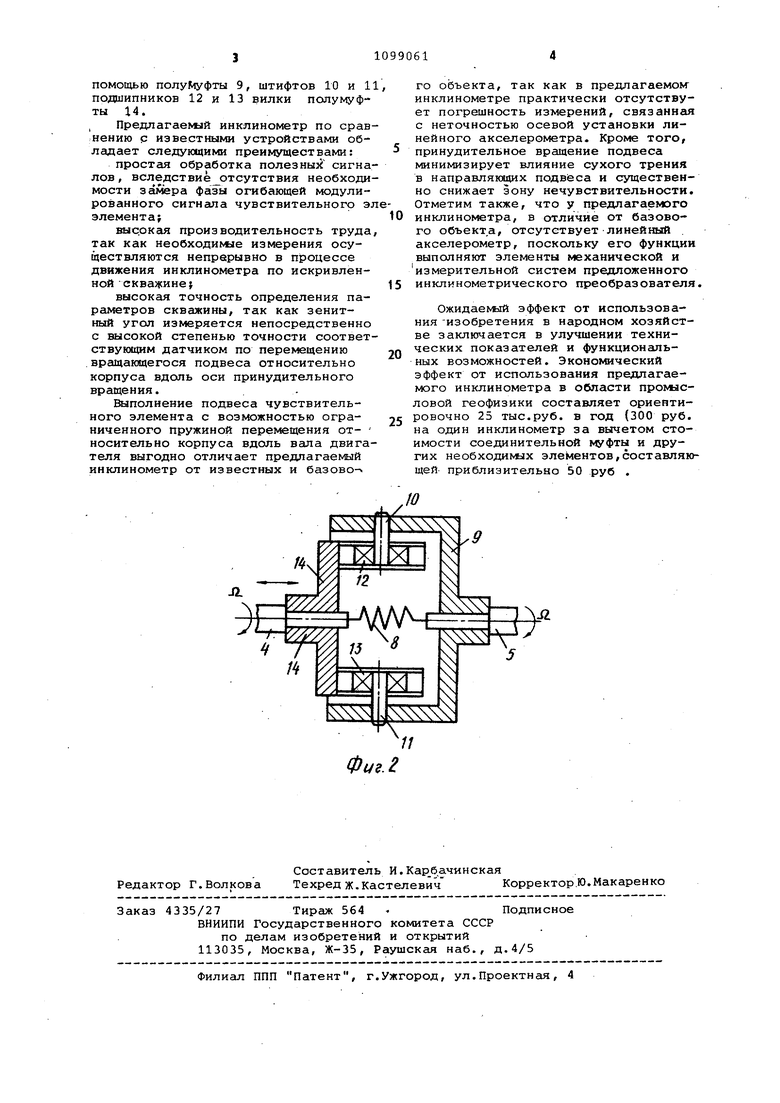
Изобретение ртносится к промысловой геофизике и может быть использовано для определения профиля искривленных скважин, пробуренных в породах любой магнитной интенсивности.. Известен инклинометр, содержащий корпус, чувствительный элемент, выполненный в виде маятника с нулевой маятниковостью, подвес которого приводится во вращение двигателем, устройство для съема сигнала Однако сложность обработки выход ных сигналов чувствительного элемен та из-за отсутствия непосредственных измерений зенитного угла и азимута и необходимости замера фазы ог бающей модулированного сигнала огра ничивают область применения такого инклинометрического устройства. Известен также инклинометр, соде жащий корпус с расположенные в нем чувствительный элемент, центр тяжес ти которого совпадает с его осью по веса, двигатель, блок съема сигнала. Известный инклинометр позволяет производить более точные и непрерыв ные измерения угловых параметров скважины в.процессе движения по ней 12. Недостатком известного инклиноме ра является невысокая точность изме рения зенитного угла из-за неизбежной погрешности установки линейного акселерометра в корпусе относительно оси принудительного вращения под веса. Целью изобретения является повышение точности измерения зенитного угла. Указанная цель достигается тем, что инклинометр, содержащий корпус, чувствительный элемент, центр тяжес ти которого совпадает с осью подвеса, двигатель, блок съема сигнала, он снабжен пружиной, один конец которой соединен с подвесом, а другой - с валом двигателя, и жестко связанной с последним полул Фтой с вилкой, штифтами и подаипниками, причем одни концы штифтов жестко связаны с подумуфтой, а другие уста новлены в подиипниках. На фиг. 1 изображена кинема-срчес кая схема инклинометра; на фиг.2 муфта, с помощью которой осуществля ется сочленение вала двигателя с подвесом. В корпусе 1 инклинометра располо жены чувствительный элемент 2, центр тяжести которого совпадает с его осью 3 подвеса 4, двигатель 5, блок съема сигнала, включающий датчики 6 и 7 соответственно угла пово рота чувствительного элемента 2 и поступательного перемещения 4. Свобода поступательного перемещения подвеса 4 с чувствительным элементом 2 относительно корпуса 1 вдоль вала двигателя 5 ограничена пружиной 8. Сочленение вала двигателя 5 с подвесом 4 (на фиг.2) осуществляется с помощью полумуфты 9, жестко связанной с валом двигателя, штифтов 10 и 11, един конец которых запрессован в полумуфту 9, а другой - соответственно в подшипники 12 и 13. Данные подшипники дают возможность ограниченного пружиной 8 перемещения вилки (полумуфты) 14, жестко связанной с подвесом, вдоль вала двигателя 5. Инклинометр работает следующим образом. В процессе движения корпуса 1 инклинометра по искривленной буровой скважине на механическую систему, состоящую из .чувствительного элемента 2 (центр тяжести которого совпадает с его осью 3 подвеса 4) и его подвеса 4, вращающихся с помощью двигателя 5, действуют .моменты центробежных и кориолисовых сил инерции, а также гравитационное ускорение q, под действием которых чувствительный элемент 2 колеблется с частотой принудительного вращения fj и амплитудой А равной А К„Уб2 + 2 (1) где К - коэффициент передачи чувствительного элемента; 0 - зенитный УГОЛ} а - азимутальный угол. Одновременно указанная механическая система (чувствительный элемент 2 в подвесе) смещается относительно корпуса 1 вдоль оси принудительного вращения (вала двигателя 5) ; на расстояние S, ограниченное пружиной 8 и определяемое следующей формулой где К. - коэффициент передачи линейного акселерометра. Замеряя с Помощью датчиков б и 7 блока съема сигнала амплитуду отклонения чувствительного элемента 2, а также смещение S .подвеса 4 после некоторых математических преобразований определяется зенитный угол и азимут искривленной скважины arccos (г--) А (4) Отметим, что вращение подвеса 3 чувствительного элемента 2 от двигателя 5 и возможность одновременного продольного движения подвеса 4 относительно корпуса 1 осуществляется с помощью полуМуфты 9, штифтов 10 и 1 подшипников 12 и 13 вилки полумуфты 14. , Предлагаемый инклииометр по срав нению р известными устройствами обладает следующими преимуществами: простая обработка полезныз сигна лов , вследствие отсутствия необходи мости замера фазы огибающей модулированного сигнала чувствительного э элемента} высокая производительность труда так как необходилые измерения осуществляются непрерывно в процессе движения инклинометра по искривленной скважине; высокая точность определения паpeiMBTpoB скважины, так как зенитный угол измеряется непосредственно с высокой степенью точности соответ ствующим датчиком по перемещению .вращающегося подвеса относительно корпуса вдоль оси принудительного вращения. йлполнение подвеса чувствительного элемента с возможностью ограниченного пружиной перемещения относительно корпуса вдоль вала двига теля выгодно отличает предлагаемый инклинометр от известных и базово- го объекта, так как в предлагаемом инклинометре практически отсутствует погрешность измерений, связаннгш с неточностью осевой установки линейного акселерометра. Кроме того, принудительное вращение подвеса минимизирует влияние сухого трения в направляющих и существенно снижает зону нечувствительности. Отметим также, что у предлагаемого инклинометра, в отличие от базового объект,а, отсутствует-линейный акселерометр, поскольку его функции выполняют элементы механической и измерительной систем предложенного инклинометрического преобразователя. Ожидаемой эффект от использования -изобретения в народном хозяйстве заключается в улучшении технических показателей и функциональных возможностей. Экономический эффект от использования предлагаеьюго инклинометра в области промысловой геофизики составляет ориентировочно 25 тыс.руб. в год (300 руб. на один инклинометр за вычетом стоимости соединительной и других необходимых элементов,составляющей приблизительно 50 руб .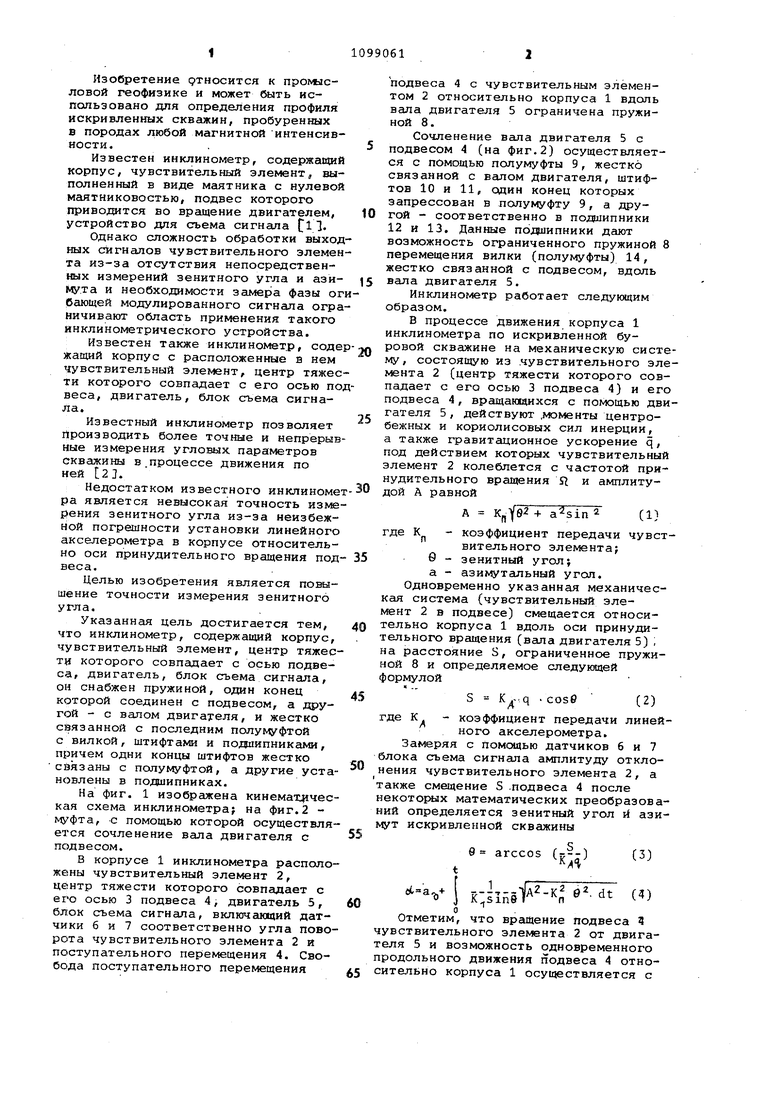
| название | год | авторы | номер документа |
|---|---|---|---|
| Инклинометр | 1981 |
|
SU972070A1 |
| КОМПЛЕКС ИНКЛИНОМЕТРИЧЕСКОЙ СКВАЖИННОЙ АППАРАТУРЫ И СПОСОБ ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ СКВАЖИН | 2000 |
|
RU2193654C2 |
| БЛОК ИНКЛИНОМЕТРИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ | 2007 |
|
RU2359121C1 |
| Инклинометр | 1986 |
|
SU1384737A1 |
| Инклинометр | 1976 |
|
SU868056A1 |
| Способ определения зенитного угла и азимута скважины и гироскопический инклинометр | 2018 |
|
RU2682087C1 |
| БЕСКАРДАННЫЙ ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР И СПОСОБ ВЫРАБОТКИ ИНКЛИНОМЕТРИЧЕСКИХ УГЛОВ | 1994 |
|
RU2101487C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗЕНИТНОГО УГЛА И АЗИМУТА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 2012 |
|
RU2507392C1 |
| Инклинометр | 1984 |
|
SU1194995A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЗЕНИТНЫХ И АЗИМУТАЛЬНЫХ УГЛОВ СКВАЖИН | 2011 |
|
RU2459951C1 |
ИНКЛИНОМЕТР, содер ащиП .корпус, чувствительный элемент, центр тяжести которого совпадает с осью подвеса, двигатель, блок съема сигналов, отлич ающийс я тем, что, с целью повышения точности измерения зенитного угла, он снабжен пружиной, один конец которой соединен с подвесом, а«другой с валом двигателя, и жестко связанной с последним полумуфтой с вилкой, штифтами и подшипниками, причем одни концы штифтов жестко связаны с полумуфтой, а другие уст.ановлены в подшипниках.
Фиг. г
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ измерения азимута наклонной скважины | 1977 |
|
SU663826A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Инклинометр | 1981 |
|
SU972070A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
