1
Изобретение относится к области электроизмерительной техники и может быть использовано для контроля обмотки узлов вращающихся трансформаторов в процессе их изготовления.5
Известно устройство, содержащее обмотку возбуждения на П-образном сердечнике, компенсационную обмотку и нуль-индикатор l.
Недостаток известного устройства 10 заключается в низкой точности контроля .
Наиболее близким по технической сущности является устройство контроля узлов вращающихся трансформаторов,- 5 содержащее эталонный ротор, источник переменного напряжения , элемент коммутации и измерительный прибор .
Недостатком этого устройства является низкая достоверность контроля. 20
Кроме того, другой недостаток этого устройст ва заключается в том, что оно реагирует только на наличие короткозамкнутых витков в обмотках узлов вращающихся трансформаторов, т.е. 25 функциональные возможности данного устройства ограничены.
Целью изобретения является повышение достоверности контроля и расширение функциональных возможностей. ЗО
Указанная цель достигается тем, что в известное устройство-, содержащее эталонный ротор, измерительный прибор и первый источник переменного напряжения, первый полюс которого соединен с первым выводом обмотки возбуждения эталонного ротора, второй вывод которой соединен со входом первой контактной группы первого элемента коммутации, первый выход которой соединен со вторым полюсом первого источника переменного напряжения, введены второй источник переменного, напряжения, первый и второй датчики угла, нуль-индикатор и второй элемент коммутации, причем первый полюс второго источника переменного напряжения соединен с первыми входами первого и второго датчиков угла и первым полюсом первого источника переменного напряжения, второй полюс которого соединен с первым и третьим выходами четвертой контактной группы первого элемента .коммутации и третьим выходом второй контактной группы первого элемента коммутации, перйый и второй выходы которой соединены с третьим .выходом первой контактной группы первого элемента коммутации, с первым выходом третьей контактной группы
первого элемента коммутации и с четвертыми входами первого и второго датчиков угла, третьи входы которых соадинены соответственно со вторым и третьим выходами третьей контактной группы первого элемента коммутации, вход которой соединен со вторым выводом обмотки возбуждения и вторым выводом квадратурной обмотки эталонного ротора, первый вывод которой соединен со входом второй контактной группы первого элемента коммутации, второй выход первой контактной группы которого соединен со вто рым полюсом второго источника переменного напряжения и вторым выходом четвертой контактной группы первого элемента коммутации, вход которой со единен со вторым входом первого датчика угла и вторым входом второго датчика угла,- первый выход которого соединен через измерительный прибор со цторым выходом первого датчика угла, первый выход которого соединен со вторым выходом второго датчика угла, а первый вход нуль-индикатора co единен со входом пятой контактной группы первого элемента коммутации, первый и второй выходы которой соединены со входом седьмой контактной группы первого элемента коммутации и первым выводом синусной обмотки контролируемого статора, второй вывод которой соединен со входом первой контактной группы второго элемента коммутации, первый выход которой соединен со вторым входом нуль-индикатора и первым выводом косинусной обмотки контролируемого статора-, второй вывод которой соединен со входом второ контактной группы второго элемента коммутации, первый выход-которой соединен с третьим выходом пятой контактной группы первого элемента коммутации и третьим выходом шестой контактной группы первого элемента коммутации, первый и второй выходы которой соединены со вторым выходом второй контактной группы второго элемента коммутации и третьим выходом седьмой контактной группы первого элемента коммутации, а вход шестой кон- тактной группы первого элемента коммутации соединен со вторым выходом первой контактной группы второго элемента коммутации.
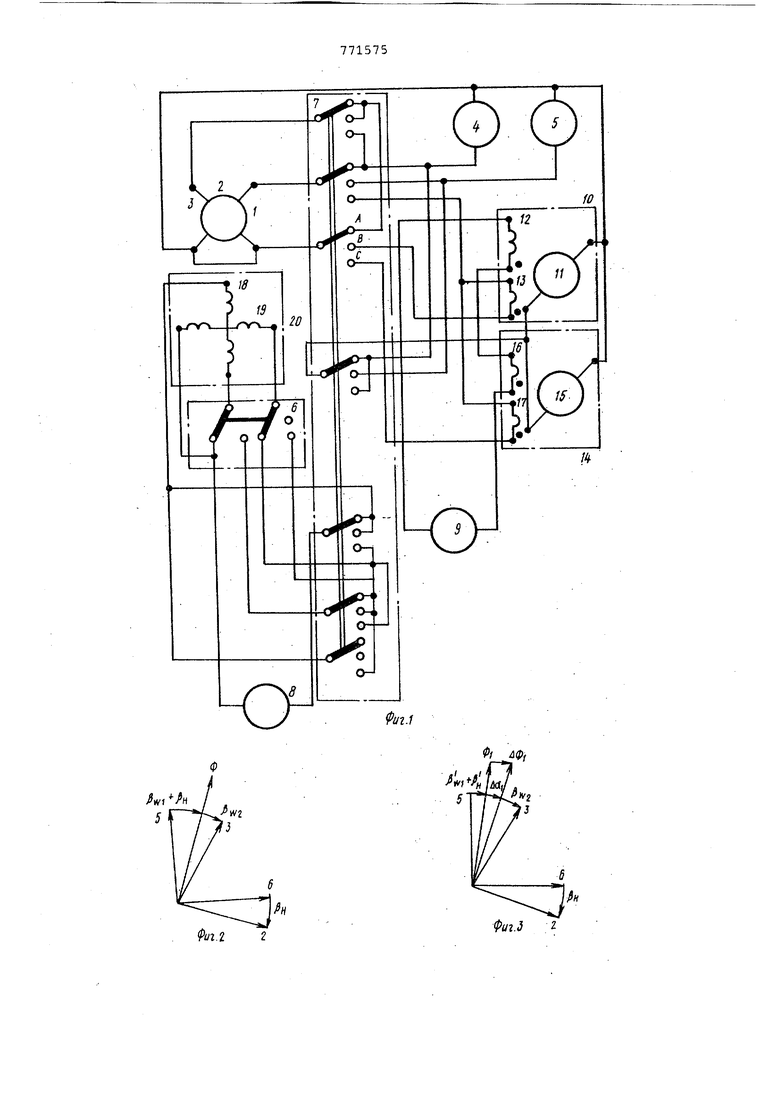
На фиг. 1 представлена структурная ; схема устройства; на фиг. 2 фиг; 7 - диаграммы, поясняющие работ уст юйства.
Устройство содержит эталонный ротор 1, содержащий обмотку возбуждения 2 и квадратурную обмотку 3, источники переменного напряжения 4 и 5, элементы коммутации ,6, 7, нуль-индикатор 8, измерительный прибор 9, датчик угла 10, содержащий ротор 11 измерительную обмотку 12 и сигналь ную обмотку 13, и датчик угла 14,
х одержащий ротор 15, измерительную обмотку 16 и сигнальную обмотку 17.
Устройство работает следующим образом.
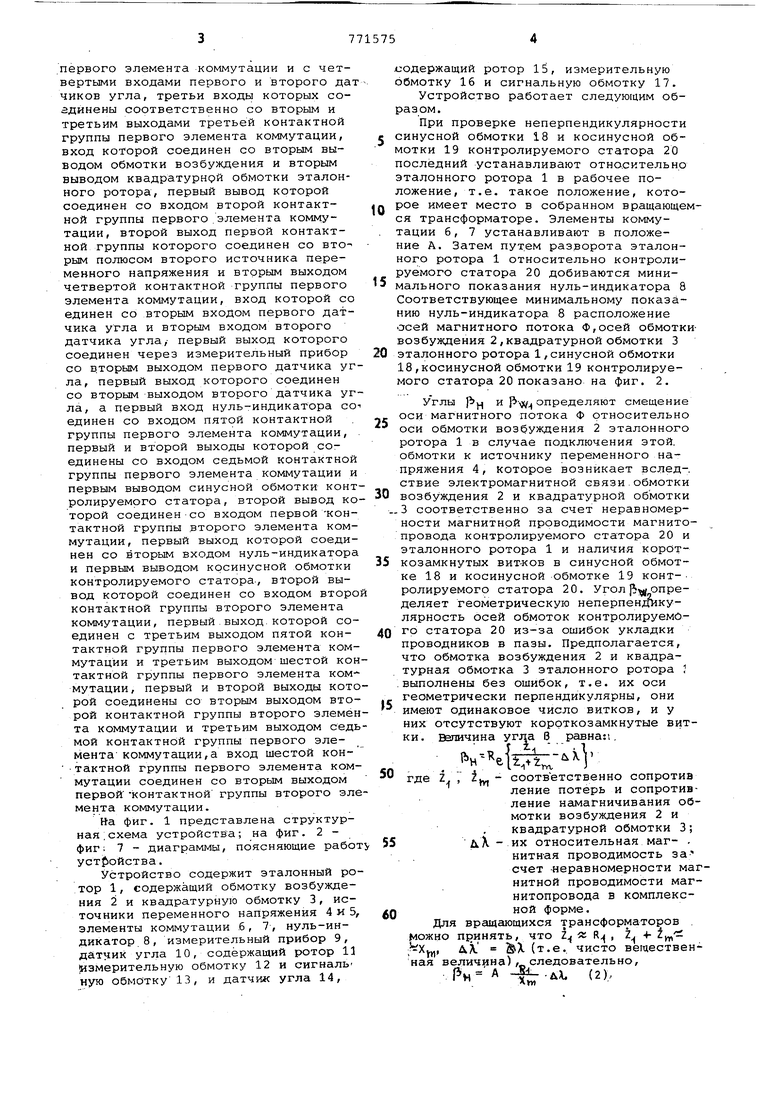
При проверке неперпендикулярности J синусной обмотки 18 и косинусной обмотки 19 контролируемого статора 20 последний устанавливают относительно эталонного ротора 1 в рабочее положение, т.е. такое положение, котоQ рое имеет место в собранном вращающемся трансформаторе. Элементы комму. тации 6, 7 устанавливают в положение А. Затем пут.ем разворота эталонного ротора 1 относительно контролируемого статора 20 добиваются минимального показания нуль-индикатора 8 Соответствующее минимальному показанию нуль-индикатора 8 расположение осей магнитного потока Ф,осей обмоткивозбуждения 2, квадратурной обмотки 3
0 эталонного ротора 1, синусной обмотки 18 , косинусной обмотки 19 контролируемого статора 20 показано на фиг. 2.
углы и ,)(/ определяют смещение оси магнитного потока Ф относительно оси обмотки возбуждения 2 эталонного ротора 1 в случае подключения этой, обмотки к источнику переменного напряжения 4, Которое возникает вслед-, ствие электромагнитной связи - обмотки возбуждения 2 и квадратурной обмотки ..3 соответственно за счет неравномерности магнитной проводимости магнитопровода контролируемого статора 20 и эталонного ротора 1 и наличия короткозамкнутых вит-ков в синусной обмотке 18 и косинусной обмотке 19 конт- ролируемого статора 20. Угол i определяет геометрическую неперпендакулярность осей обмоток контролируемого статора 20 из-за ошибок укладки проводников в пазы. Предполагается, что обмотка возбуждения 2 и квадратурная обмотка 3 эталонного ротора 3 выполнены без ошибок, т.е. их оси геометрически перпендикулярны, они имеют одинаковое число витков/ и у них отсутствуют короткозамкнутые витки, шличина угца В равна:.
; i . 1
ыгде Z
соответственно сопротив ление потерь и сопротивление нгилагничивания обмотки возбуждения 2 и квадратурной обмотки 3; 4 - их относительная маг- . нитн-ая проводимость засчет -неравномерности магнитной проводимости магнитопровода в комплексной форме. Для вращающихся трансформаторов
можно п эинять, что . R , 2
1
Х (т.е..
Х чисто вещественW
ная величина)/. следовательно, А -| -ДХ, (2).
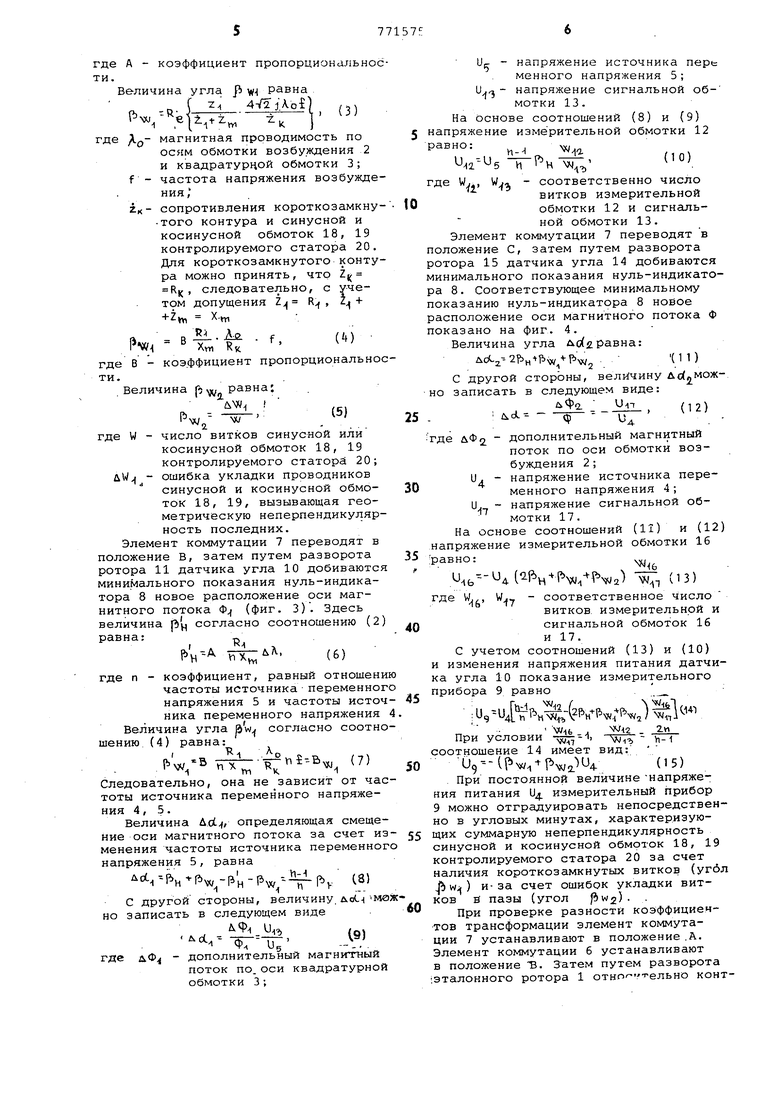
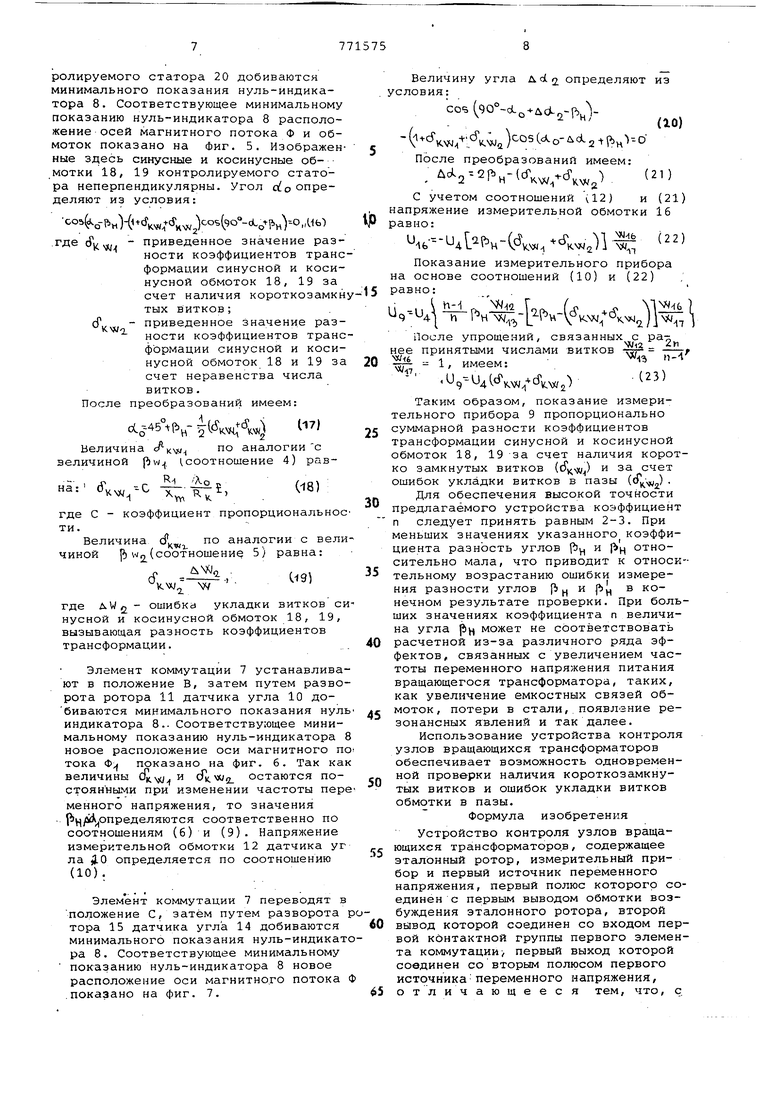
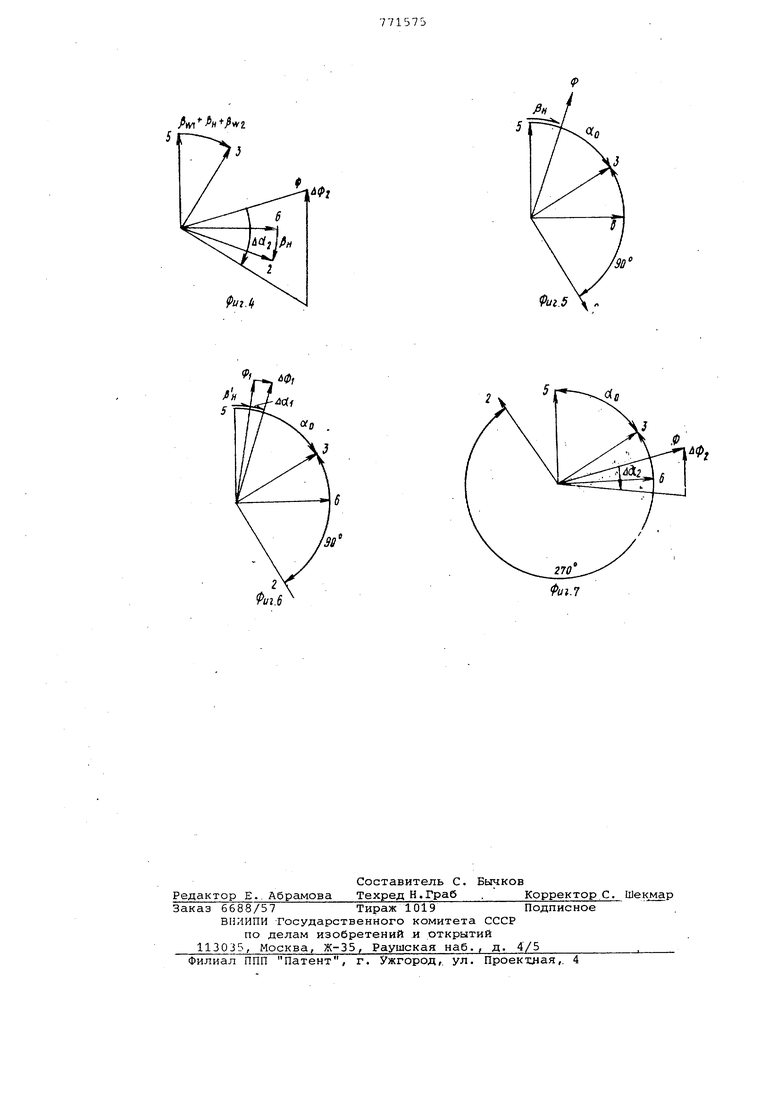
Гп где A - коэффициент пропорционально ти. Величина угла f 4 равна -t 4V23 of i t. 1 ..-r-w k где Дд- магнитная проводимость по осям обмотки возбуждения 2 и квадратурной обмотки 3; f - частота напряжения возбужде ния, ZK- сопротивления короткозамкну того контура и синусной и косинусной обмоток 18, 19 контролируемого статора 20 Для короткозамкнутого конту ра можно принять, что Z|j RK, следовательно, с учетом допущения Z R: , +Z Х.У, . Л-о Хщ RK где В - коэ(1)фициент пропорционально ти. Величина о равна: - 5 где W - число витков синусной или косинусной обмоток 18, 19 контролируемого статора 20; uW - ошибка укладки проводников синусной и косинусной обмоток 18, 19, вызывающая геометрическую неперпендикуляр ность последних. Элемент коммутации 7 переводят в положение В, затем путем разворота ротора 11 датчика угла 10 добиваютс минимального показания нуль-индикатора 8 новое расположение оси магнитного потока Ф (фиг. 3). Здесь величина р согласно соотношению (2 равна: где п - коэффициент, равный отношен частоты источника-переменно напряжения 5 и частоты исто ника переменного напряжения Величина угла йЦ согласно соотн шению (4) равна: р-Ч® , Следовательно, она не зависит от ча тоты источника переменного напряжения 4, 5. Величина ДоС, определяющая смеще ние оси магнитного потока за счет и менения частоты источника переменно напряжения 5, равна до ч-рн р Рн-р ;- ру 2 с другой стороны, величину дc(. м но записать в следующем виде ., - i) Ф и где дФ - дополнительный магнитный поток по. оси квадратурной обмотки 3; и - напряжение источника nept менного напряжения 5; и - напряжение сигнальной обмотки 13. На Основе соотношений (8) и (9) напряжение измерительной обмотки 12 равно: ,. , . - соответственно число VI -/ витков измерительной обмотки 12 и сигнальной обмотки 13. Элемент коммутации 7 переводят в положение С, затем путем разворота ротора 15 датчика угла 14 добиваются минимального показания нуль-индикатора 8. Соответствующее минимальному показанию нуль-индикатора 8 новое расположение оси магнитного потока Ф показано на фиг. 4. Величина угла ло(равна: дс«.-21Ь„ 1Ь 1Ъ- - (П) С другой стороны, величину лс(,можно записать в следующем виде: . : . (12) u.dL где дФ. - дополнительный магнитный поток по оси обмотки возбуждения 2 ; Uj - напряжение источника переменного напряжения 4; и. - напряжение сигнальной обмотки 17. На основе соотношений (11) и (12) напряжение измерительной обмотки 16 ;равно: (13) U ь--Uд(ap)) где W,, - соответственное число витков измерительной и сигнальной обморок 16 и 17. С учетом соотношений (13) и (10) и изменения напряжения питания датчика угла 10 показание измерительного прибора 9 равно :u,( j Vsf422.r При условии . S; ITIT соотношение 14 имеет вид: 05--lp |b)U4. (15) При постоянной величине напряжения питания и измерительный прибор 9 можно отградуировать непосредственно в угловых минутах, характеризующих суммарную неперпендикулярность синусной и косинусной обмоток 18, 19 контролируемого статора 20 за счет наличия короткозамкнутых витков (угбл w) и-за счет ошибок укладки витков и пазы (угол fiw) При проверке разности коэффициенов трансформации элемент коммутации 7 устанавливают в положение .А. Элемент коммутации 6 устанавливают в положение В. Затем путем разворота эталонного ротора 1 отнп- тельно контролируемого статора 20 добиваются минимального показания нуль-индикатора 8. Соответствующее минимальному показанию нуль-индикатора 8 расположение осей магнитного потока Ф и обмоток показано на Фиг. 5. Изображенные здесь синусные и косинусные об- мотки 18, 19 контролируемого статора неперпендикулярны. Угол определяют из условия:
,- к ;2 °Ч °°- -о РнУ-о.Иь)
где . приведенное значение разности коэффициентов трансформации синусной и косинусной обмоток 18, 19 за счет наличия короткозамкн тых витков;
cf,x V, приведенное значение разк ил
ности коэффициентов трансформации синусной и косинусной обмоток 18 и 19 за счет неравенства числа витков. После преобразовании имеем:
d--45 р,,- (S,. И7)
Величина по аналогии с величиной fbw. (.соотношение 4) рав-
(18)
где С - коэффициент пропорциональное
ти.
Величина сГ по аналогии с величиной jb W2(соотношение 5) равна:
а : г.«г
cf.
(.191
KW,2 V/
де AW, - ошибка укладки витков синусной и косинусной обмоток 18, 19, вызывающая разность коэффициентов трансформации.. 40
Элемент коммутации 7 устанавливают в положение В, затем путем разворота ротора 11 датчика угла 10 добиваются минимального показания нулЬ АС индикатора 8.. Соответствующее минимальному показанию нуль-индикатора 8 новое расположение оси магнитного по тока Ф показано на фиг. 6. Так как величины ( и (,2 остаются по- , стоянными при изменении частоты пере менного напряжения, то значения рц Ц определяются соответственно по соотношениям (6) и (9). Напряжение измерительной обмотки 12 датчика уг ла iJ.0 определяется по соотношению (10).
Элемент коммутации 7 переводят в положение С, затем путем разворота ротора 15 датчика угла 14 добиваются 60 минимального показания нуль-индикатора 8. Соответствующее минимальному показанию нуль-индикатора 8 новое расположение оси магнитного потока Ф .показано на фиг. 7.65
Величину угла Лd определяют из условия:
co-5(90°-d..d.,-(y
(10)
(,)05C 0-u l2-Vib V-0После преобразований имеем: . Л° 2-2рн-(кчх,.сУ,,„ ) (21)
KW.KWg с учетом соотношений 12) и (21) напряжение измерительной обмотки 16 равно:
.Ь--и4 Р цЧ К.,К.Л
хмиь
22 «,
Чт
Показание измерительного прибора на основе соотношений (10) и (22) равно:
и -., )г, ( . Uq-U П ,,-L(,)J
После упрощений, связанных с ранее принятыми числами витков -та - 1, имеем: - .U,--U4(ci.rf,) -(23)
Таким Образом, показание измерительного прибора 9 пропорционально суммарной разности коэффициентов трансформации синусной и косинусной обмоток 18, 19 за счет наличия коротко замкнутых витков (щ) и за счет ошибок укладки витков в пазы ()
Для обеспечения высокой точности предлагаемого устройства коэффициент п следует принять равным 2-3. При меньших значениях указанного коэффициента разность углов и (ц относительно мала, что приводит к относительному возрастанию ошибки измерения разности углов fb ( и |ъ| в конечном результате проверки. При больших значениях коэффициента п величина угла р может не соответствовать расчетной из-за различного ряда эффектов, связанных с увеличением частоты переменного напряжения питания вращающегося трансформатора, таких, как увеличение емкостных связей обмоток, потери в стали, появление резонансных явлений и так далее.
Использование устройства контроля узлов вращающихся трансформаторов обеспечивает возможность одновременной проверки наличия короткозамкнутых витков и ошибок укладки витков обмотки в пазы.
Формула изобретения
Устройство контроля узлов вращающихся трансформаторов, содержащее эталонный ротор, измерительный прибор и первый источник переменного напряжения, первый полюс которого соединен с первым выводом обмотки возбуждения эталонного ротора, второй вывод которой соединен со входом первой контактной группы первого элемента коммутации первый выход которой соединен со BTopfcJM полюсом первого источника переменного напряжения, отличающееся тем, что, с целью повышения достоверности контроля и расширения функциональных возможностей, в него введены второй источник переменного напряжения, первый и второй датчики угла, нуль-индикатор и второй элемент коммутации, причем первый полюс второго источника переменного напряжения соединен с первыми входами первого и второго дат чиков угла и первым полюсом первого источника переменного напряжения, второй полюс которого соединен с первым и третьим выходами четвертой контактной группы первого элемента коммутации и третьим выходом второй контактной группы первого элемента коммутации, первый и второй выходы которой соединены с третьим выходом пер вой контактной группы первого элемента коммутации, с первым выходом третьей контактной группы первого элемента коммутации и с четвертыми входами первого и второго датчиков угла, третьи входы которых соединены соответственно со вторым и третьим выходами третьей контактной группы первого элемента коммутации, вход которой соединен со вторым выводом обмотки возбуждения и вторым выводом квадратурной обмотки эталонного ротора, первый вывод которой соединен со входом второй контактной группы первого элемента коммутации, второй выход пер вой контактной группы которого соединен со вторым полюсом второг;о источника переменного напряжения и вторым выходом четвертой контактной группы первого элемента коммутации, вход которой соединен со вторым входом пер вого датчика угла и вторым входом вто рого датчика угла, первый выход которого соединен через измерительный прибор со вторым выходом первого датчика угла, первый выход которого соединен со вторым выходом второго датчика угла, а первый вход нуль-индикатора соединен со входом пятой контактной группы первого элемента коммутации, первый и второй выходы которой соединены со входом седьмой контактной группы первого элемента коммутации и первым выводом синусной обмотки контролируемого статора, второй вывод которой соединен со входом (Первой контактной группы второго элемента коммутации, первый выход которой соединен со вторым входом нульиндикатора и первым выводом косинусной обмотки контролируемого статора, второй вывод которой соединен со входом второй контактной группы второго элемента коммутации, первый выход которой соединен с третьим выходом пятой- контактной группы первого элемента коммутации и третьим выходом шестой контактной группы первого элемента коммутации, первый и второй выходы которой соединены со вторым выходом второй контактной группы второго элемента коммутации и третьим выходом седьмой контактной группы первого элемента коммутации, а- вход шестой контактной группы первого элемента коммутации соединен со вторым выходом первой контактной группы второго элемента коммутации. Источники информации, принятые во внимание при экспертизе 1.Авторскоесвидетельство СССР № 140892, кл. G01 R-31/06, 1959. 2.Авторскоесвидетельство СССР № 504991, кл. G01 R 33/12, 1973 (прототип).
А
Фиг.г г
Ф) Щ
h
.З г
fiw 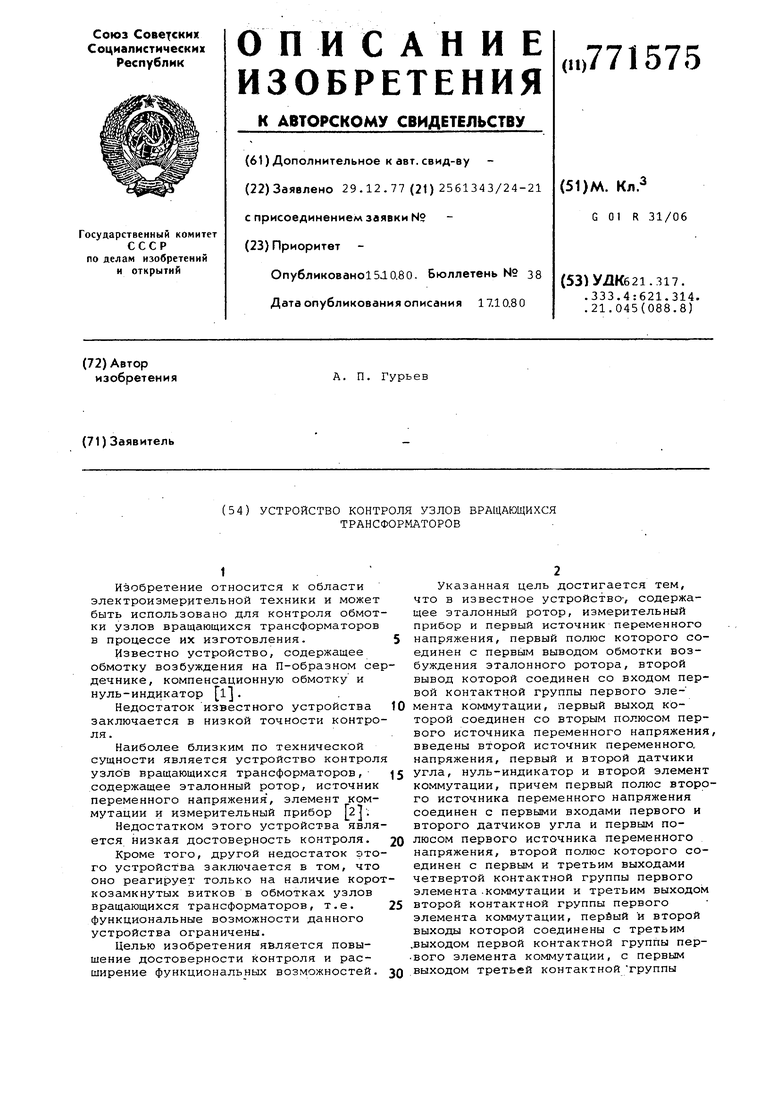
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СЛЕДЯЩЕЙ СИСТЕМЫ | 1979 |
|
SU826287A1 |
| Прибор для контроля несимметрии расположения зубцов магнитопровода электрической машины | 1987 |
|
SU1472854A1 |
| Устройство для контроля погрешности вращаюшихся трансформаторов | 1972 |
|
SU451119A1 |
| Устройство для измерения погрешности синусно-косинусного поворотного трансформатора | 1982 |
|
SU1056253A2 |
| Вентильный электродвигатель | 1986 |
|
SU1418880A1 |
| Устройство для контроля обрыва и короткого замыкания цепей фазовращателя на основе синусно-косинусного вращающегося трансформатора с квадратурным питанием обмоток возбуждения | 1982 |
|
SU1027649A1 |
| Вентильный электродвигатель | 1989 |
|
SU1767638A1 |
| Двухканальный датчик угловыхпЕРЕМЕщЕНий | 1979 |
|
SU853377A2 |
| Вентильный электродвигатель | 1986 |
|
SU1418879A1 |
| СЛЕДЯЩАЯ СИСТЕМА С КОНТРОЛЕМ ИСПРАВНОСТИ | 1973 |
|
SU383008A1 |
(иг.7
