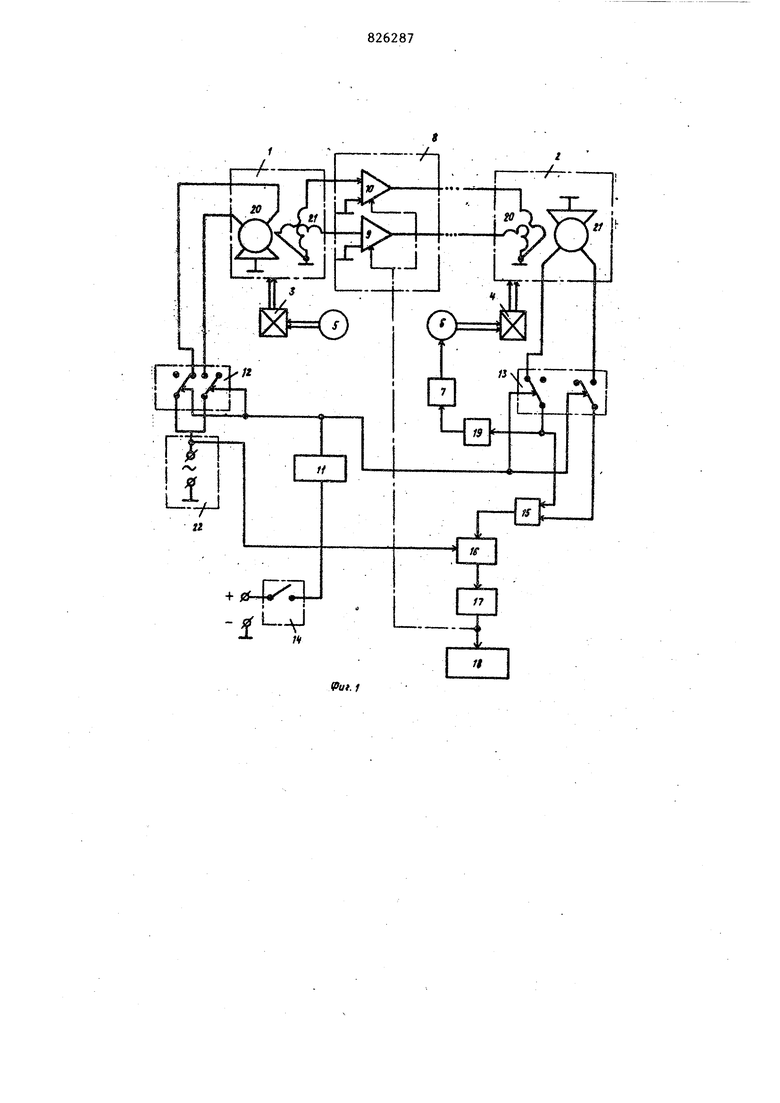
Изобретение относится к автоматичеекому контролю и может быть использовано при контроле дополнительной передачи углового положения вала Известно устройство для контроля погрешностей синхронно-следящнх систем, позволяющее определить ошибку контроля по разности значений отсчет ной части делительных устройств дат чика и приемника . Недостатками этого устройства являются невысокое быстродействие и сложность конструкции. Наиболее близким к предпагаепюму является устройство для контроля погрешности следящей системы дистанц онной передачи угла, содержащеег последовательно соединенные генератор опорного напряжения, синусно-крсинус ные поворотные трансформаторы, датчик и , усилитель и двигател а также аналого 1Й датчик угла, статор которого установлен на валу датчика, а ротор - на валу приемника. в этом устройстве вал датчика и вал приемника располагаются так, что на одном из них устанавливается ротор аналогового датчика угла, а на другом - статор аналогового датчика угла. В согласованном начальном положении системы напряжение аналогового датчика угла равно нулю. В процессе контроля системы. вследствие погрешностей,возникает угловое рассогласование между валом датчика и приемника,которое с помощью аналогового датчика угла преобразуется в электрический сигнал, пропорциональный по ампитуде погрешности, контролируемой следящей системы tz. Недостатком данного устройства является низкая эффективность синхронно-следящих систем дистанционной передачи угла из-за отсутствия автоматического контроля следящих систем непосредственно в процессе их работы или эксплуатации. Цель изобретения - повышение точности контроля. Поставленная цел достигается тем, что в устройство для контроля следящей системы, содержащее генератор опорного напряжения,синуснокосинусный трансформатор-датчик, соединенный вторичными обмотками с первичными обмотками синусно-косинусного трансформатора-приемника через блок нормализаторов, усилитель выход которого подключен к обмотке управления электродвигателя, вал которого через редуктор соединен с валом синуснр-косинусного поворотного трансформатора-приемника, и формирователь импульсов, введены ключ, двухполюсные переключатели, сумматор синхронный детектор, фильтр и генера тор низкой частоты, вход которого подключен через ключ к первому выходу генератора опорного напряжения, подсоединенного вторым выходом через первый двухполюсный переключател к первичнымобмоткам синусно-косинусного поворотного трансформаторадатчика, а выход - к управлякнцим входам двухполюсных переключателей, выходы вторичных .обмоток синуснокосинусного трансформатора-приемника черех второй двухполюсный переключатель подключены к соответствующим двум входам сумматора, выход которого соединен с первым входом синхронн го детектора, второй вход которого подключен ко второму выходу генератора опорного напряжения, выход через фильтр ко входу формирователя импудьсов, а один из выходов второго двухполюсного переключателя через -усилитель соединен с обмоткой управления электродвигателя. На фиг,1 изображена блок-схема устройства; на фиг.2 - временная ди грамма его работы. Устройство содержит синусно-косинусный поворотный трансформатор-датчик 1, синусно-косинусный поворотный трансформатор-приемник 2, редукторы 3 и 4, электродвигатели 5 и 6, усилитель 7, блок 8 коммутаторов, состоящий из усилителей 9 и 10, генератор 11 низкой частоты, двухполюсные переключатели 12 и 13, ключ 14, сумм тор 15, синхронный детектор 16, филь 17, формирователь 18 импульсов и согласующий делитель 19, Синусно-косинусныё поворотные тра форматора-датчика 1 и трансфоматораприемника 2 содержат соответственно по две первичные 20 и вторичные 21 обмотки (приемник) , оси которых сдвинуты между собой на угол, равный -90 /Р, где Р - число пар полюсов датчика и приемника. Входные первичные) квадратурные обмотки 20 трансформатора-датчика 1 через переключатель 12 подключены к генератору 22 опорного напряжения. Выходные вторичные)) квадратурные обмотки 21 трансформатора-датчика 1 через усилители 9 и 10 блока 8 подключены к обмоткам 20 трансформатора 2, выходные обмотки 21 которого через двухполюсный переключатель 13, сумматор 15 и детектор 16 подключены к формирователю 18, причем один из выходов переключателя 13 через делитель 19 и усилитель 7 подключен к обмотке управления ; электродвигателя 6, Вход генератора 11 через ключ 14 подключен к источнику постоянного ( или переменного) тока, а выход - к управляющим входам переключателей 12 и 13, i Устройство работает следукяцим образом При замкнутом ключе 14 генератор 11 отключен и на его выходе сигнал отсутствует При этом первые пары контактов переключателей 12 и 13 нахо|дятся в замкнутом положении (фиг,1). а вторые пары - в разомкнутом В этом случае переменное напряжение генератора 22 через первую пару контактов переключателя 12 поступает на запитку первой входной обмотки трансформатора-датчика 1, а виход- ное напряжение первой вторичной обмотки трансформатора-приемника 2 при Р 1, определяемое уравнением Upac UoS odo-fbo S ncOot, ) где ,с и с угловые положения рото- ;. ров трансформатора-датчика и трансформатора-приемника, через первую пару контактов переключателя 13 поступает на обмотку управления элек тродвигателя 6, который приводит во вращение через редуктор 4 вал трансформатора-приемника 2 до устранения рассогласования. При Ирд 0, о т,е, угловые положения роторов трансформатора-датчика и трансформатора-приемника равны друг другу. Уравнение (1) , определяющее выходной сигнал рассогласования еле5дящей системы дистанционной передачи угла, имеет место в том случае, если трансформаторы датчика 1 и приемника 2 выполнены идеальными, т.е. без погрешностей. Кроме того, предполага ется, что параметры усилителей 9 и 10 являются абсолютно идентичным Однако на практике параметры усилите лей 9 и 10 отличаются от расчетных, что приводит к появлению угловой погрешности передачи угла. Угловая погрешность следящих систем дистанционной передачи угла, выполненных на основе двухполюсных, а в некоторых случаях и многополюсниках, синусно-косинусных поворотных трансформаторов (например индуктосинов) имеетхарактер второй гармоники и определяется уравнением ЛСр иоЬл1р,(.2н) Сг) В этом случае уравнение (1) будет равноUpac JoS i° o-p o)ulpi .oi . 0(.)о , при этом при рос ( )г т,е. передача угла осуществляется с погрешностью АЧ(оСо) определяемой уравнением (2), Выявление этой погрешности в устройстве происходит следующим образом. При установке ключа 14 в замкнуто положение на выходе генератора 11 появлятся прямоугольные импульсы низ кой частоты (фиг, 2) СО 14 л COQ, где СОо частота выходного напряжения генератора. Эти импульсы поступают н управляющие входы переключателей 12 и 13, при этом при нулевом сигнале на выходе генератора 11 в замкнутом положении будут находиться первые пары контактов переключателей 12 и 13, а при единичном значении сигнала на выходе генератора 11 в замкнутом положении будут находиться вторы пары контактов переключателей 12 и 13, так как вторые пары контактов переключателей 12 и 13 подключают ответственно вторую Квадратурную (5 7 первичную обмотку трансформаторадатчика 1 к генератору 22 и вторую (квадратурную) вторичную обмотку трансформатора-приемника 2 к входу сумматора 15. В результате синхронной коммутации первичных обмоток трансформатора-приемника 2, сигнал навыходе сумматора 15, с учетом погрешностей следящей системы,опредeляe ыx уравнением (2), будет равен:прн , т,е, за первый период коммутации, UUM Uo-S n loto-f oVuq 2-sin 2odo + +- otjH iSinCO при Т т. Тц , т,ео за второй ,период коммутации, C(jM o& n { o-poUuq 2S fi(2ot 2нЯ Sin Woi: 4 OL «ЭР угловые положения квадратурных роторных обмоток трансформаiтора-датчика 1 и трансформатора-приемника 2. р, (Г) После подстановки (7) в (6) находим, что сигнал на выходе сумматора 15 может быть представлен в виде оНп(оСо-| о) .(oo,)-S4nc0ot, йЧ 2 п2ого при uqjjloto.i) -ucf2-s n2odo, 6t Тц 2 К - к Из полученного уравнения (8) видно, что в устройстве угловая погрешность следящей системы дистанционной передачи угла в результате синхронной коммутации роторных обмоток датчика и приемника принимает временной характер, проявляясь в виде знакопеременной прямоугольной функции () следующей с частотой СОц причем амплитуда этой функции определяется величиной угловой погрешности дер .(xjt о). Для выделения функции Д Ч2( несущей информацию об угловой погрешности следящей системы дистанционной передачи угла, выходной сигнал (8) сумматора 15 в детекторе 16 перемножается с опорным сигналом Uo,,(t) cUgSin COoi; генератора 22. В результате на выходе детектора 16 будет сформирован сигнал вида (io)() Uo Si п (обо - Р о) Л tf .(oi 0,-t) COS 2 03ot.. Высокочастотная переменная состав ляющая (с частотой 2сОо) выходного сигнала детектора с помощыо фильтра 17 отфильтровывается и на вход форми рователя 18 не проходит. Низкочастот ,нал составляющая детектора 16, равна UcoHHa oS io o-fboUUo epa o o.-t поступает на вход блока формирователя 18 в качестве полезного сигнала, несущего информацию от контролируемо погрешности следящей системы передачи угла. Как видно из блок-схемы (фиг. процессе коммутации роторных обмоток датчика и приемника, на вход обмотки управления электродвигателя 6 периодически с частотой поступает с вы хода первой вторичной роторной обмотки траисформатора-прнемиика 2 через первую пару контактов переключателя 13 сигнал рассогласования,определяемый уравнением (5) , причем амплитуда этого сигнала совпадает с амплитудой сигнала рассогласования (З) , поступающего на обмотку управления двигателя прн отсутствии коммутации роторных обиоток. Под воздействием импульсного сигнала (5), следующего с частотой 00, электродвигатель 6,вращаясь, разворачивает вал трансформатора-приемника 2 до устранения сигнала рассогласования, при этом при Upoc (oto)-О, (, Щ т.е. и в процессе коммутации роторны обмоток трансформатора-датчика 1 и трансформатора-приемника 2 следящая система будет осуществлять дистанционную передачу угла. Подставив (Ю) в (9) находим,что сигнал на входе формирователя I8 будет равен сониг о Ч2-5(2ЛоШз„) -i-Uo&c|2 oCo,t)- } Таким образом, из полученного уравнения (ll) следует, что амплитуда сигнала постоянного тока вида -иойЦ)2&Ап() со пост а также амплитуда низкочастотного сигнала переменного тока с частотой (л ц вида исО ), где Лсу 2 (, ) определяется уравнением 8) пропорциональны угловой погрешности следящей системы дистанционной передачи угла. Эти сигналы (или один из этих сигналов) поступают в формирователь 18,в котором эти; сигналы или регистрируются на самописце, с целью осциллографирования суммарной погрешности следящей системы, или используются для автоматической или ручной коррекции (симметрирования) измерительных элементов (например усилителей 9 или 10) следящей системы, с целью уменьшения угловой погрешности дистанционной передачи угла. После проведения контроля погрешности следящей системы дистанционной передачи угла ключ 14 устанавливается в разомкнутое положение, генератор i1 отключается и процесс коммутации ротормйх обмоток трансформатора-датчика 1 и трансформатора-приемника 2 прекращается. В этом случае, как было указано раньше, на выходе Ъервой вторичной обмотки трансформатора-приемника 2 формируется непрерывный сигнал рассогласования (|), под воздействием которого электродвигатель 6, вращаясь, разворачивает вал трансформатора-приемника 2 до устранения рассогласования. Предпагаемое устройство позволяет с высокой Точностью осуществить контроль угловой погрешности следящей системы,причем работрспособность контролируемой следящей системы во время определения ее угловой погрешности полностью сохраняется. Формула изобретения Устройство для контроляследящей систеьм, содержащее генератор опорного напряжения, синусно-косииусный трансформатор-датчик, соединенный
вторичными обмотками с первичными обмотками синусно-косинусного поворотного трансформатора-приемника через блок нормализаторов, усилитель, выход которого подключен к обмотке управления электродвигателя, вал которого через редуктор соединен с валом синусно-косинусного трансформатора-приемника, и формирователь импульсов , отличающееся тем, что, с целью повышения точности устройства, в него введены ключ двухполюсные переключатели, сумматор, синхронный детектор, фильтр и генератор низкой частоты, вход которого подключен через ключ к первому выходу генератора опорного напряжения, под-, соединенного вторым выходом через первый двухполюсный переключатель к . .первичным обмоткам синусно-косинус-г ного поворотного трансформатора-датчика, а выход - к управляющм входам
двухполюсных переключателей, выходы вторичных обмоток синусно-косинусного трансформатора-приемника через второй двухполюсный переключатель
подключены к соответствующим двум входам сумматора, выход которого соединен с первым входом синхронного детектора, второй вход которого подключен ко второму выходу генератора опорного напряжения, выход через фильтр ко входу формирователя импульсов, а один из выходов второго двухполюсного переключателя через усилитель соединен с обмоткой
управления электродвигателя.
Источники информации, принятые во внимание при экспертизе
1.Ахметжанов А, А, Синхронно-спедящие системы поввшенной точности,
М., ГЭИ, 1966, с.208.
2.Там же. с.264 (прототип).




| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для передачи сигналов угловых перемещений | 1979 |
|
SU773679A1 |
| Преобразователь угол-код | 1974 |
|
SU465646A1 |
| Двухотсчетный преобразователь уголкод | 1974 |
|
SU482785A1 |
| Преобразователь угла поворота валаВ КОд | 1979 |
|
SU840998A1 |
| Устройство для контроля погрешностей следящей системы дистанционной передачи угла | 1975 |
|
SU607252A1 |
| Устройство для задания угла поворота | 1979 |
|
SU849269A1 |
| Преобразователь угла поворота вала в код | 1978 |
|
SU752428A1 |
| Преобразователь угла поворота вала в код | 1980 |
|
SU942097A1 |
| Преобразователь угла поворота вала в код | 1980 |
|
SU896654A1 |
| Следящая система | 1982 |
|
SU1118961A1 |

+j :: q-fL
J. ftf
1л
.
a
iput.t
