1
Изобретение предназначено для дистанционной передачи угла с одновременным обеспечением контроля правильности передачи угловой информации и может найти применение во многих отраслях техники, в частности в авиационной технике.
Известны следящие системы с контролем исправности, содержащие измерительный элемент, пороговый блок на реле, обмотка которого подсоединена к квадратурной роторной обмотке синусно-косинусного трансформатора приемника (СКТ) и дополнительный К1- toтор последнего механически связан с ротором СКТ-приемника и развернут относительно него на 45°. Статорные обмотки подключены параллельно статорным обмоткам основного СКТ-приемника, а роторные обмотки соединены последовательно и встречно.
Однако наличие контактного элемента - реле для обеспечения контроля обрыва двух проводов линии связи - снижает надежность схемы контроля, ухудшает условия симметрирования СКТ-приемника контролируемой системы, что снижает точность и надежность контролируемой системы.
Кроме того, система, характеризуется отсутствием самоконтроля схемы контроля, например при неисправности любой из выходных обмоток контрольного СКТ или измерительного элемента схема не выдает сигнал неисправности при неисправной системе в значительном диапазоне углов.
Цель изобретения - повысить достоверность контроля.
Это достигается за счет использования снгпалов не только встречного, по и согласного включения обмоток и последующего логического сложения обоих сигналов.
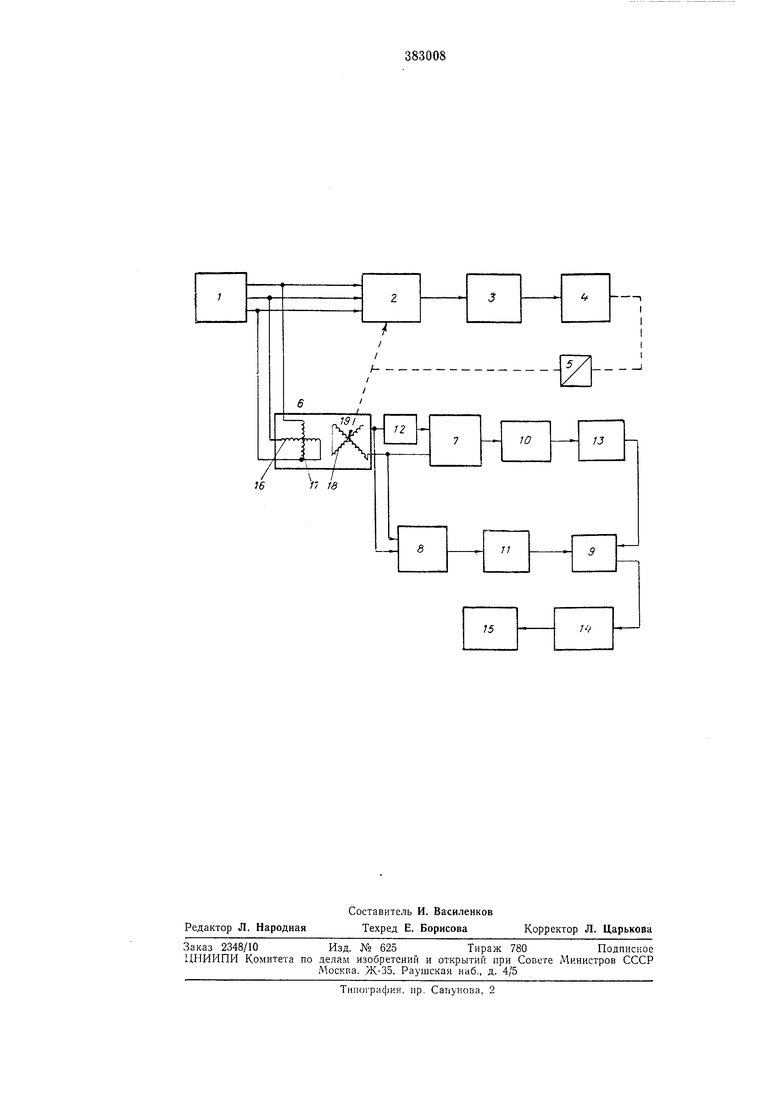
На чертеже приведена функциональная схема следяще ; системы. Система состоит из СКТ-датчика /, СКТ-приемника 2, усилителя 3, двигателя 4, редуктора 5, контрольного СКТ 6, сумматоров 7-9, детекторов 10 и 11,
инверторов 12 и 13, порогового усилителя 14, и индикатора 15 (бленкера).
Часть элементов (с / по 5) представляет собой обычную следящую систему на СКТ и работает по известному принципу.
Входные обмотки 16 к 17 контрольного СКТ
6подключены к датчику 1 параллельно приемнику 2. Сигнал с выходных обмоток 18 и 19 контрольного СКТ подаются на сумматоры
7и 5. Причем па сумматор 5 сигналы поступают согласно, а на сумматор 7 одип из сигналов подается через инвертор, т. е. сигналы подаются встречно. В результате этого на выходе сумматора 8 получается сумма сигр.алов, а на выходе сумматора 7 - разность сигналов.
Сигналы с сумматоров выпрямляются детекторами 10 у( 11 W. подаются на сумматор 9. Причем сигнал разности с сумматора 7 поступается на сумматор 9 через инвертор, т. е. с обратным знаком. С выхода сумматора 9 сигнал поступает на пороговый усилитель 14, усиливается и подается на бленкер 15.
Ротор контрольного СКТ 6 предварительно развернут на 45° по отношению к ротору СКТ-приемника 2, поэтому при исправной работе системы в согласованном ее положении напряжения на синусной и косинусной обмотках контрольного СКТ по величине равны между собой и на выходе сумматора 7 сигнал равен нулю, а на выходе сумматора 8 какомуто определенному значению, пропорциональному сумме напряжений на обмотках 18 и 19 контрольного СКТ.
В результате на один вход сумматора 9 поступает сигнал, а на другом входе он равен нулю. На выходе сумматора 9 есть сигнал, на выходе порогового усилителя также есть сигнал, бленкер обтекается током и флажок неисправности находится в закрытом положении.
При обрыве цепи обмоток контрольного СКТ-приемника, обрыве двух проводов линии связи приемника с датчиком и потере питания датчика на выходе сумматора 8 сигнал уменьшается, при других типах неисправности сигнал на выходе сумматора 7 увеличивается.
Сигнал с сумматора 7 компенсирует сигнал с сумматора 8, на выходе сумматора 9 сигнал уменьшается, на выходе усилителя 14 сигнал тоже резко уменьшается, бленкер 15 обесточивается и под действием пружины бле ;кера появляется флажок неисправности,
Предмет изобретения
Следяшая система с контролем исправности, содержашая индикатор, синусно-косинусный трансформатор-датчик, соединенный с синусно-косинусным трансформатором-приемником, выход которого через усилитель соединен с двигателем, подключенным через редуктор к ротору контрольного синусно-косинусного трансформатора, который механически связан с ротором приемника основного синусно-косинусного трансформатора и развернут относительно него на 45°, статорные обмотки контрольного синусно-косинусного трансформатора подключены параллельно статорным обмоткам приемника основного синусно-косинусного
трансформатора, а роторные об.мотки соединены последовательно и встречно, отличающаяся тем, что, с целью повышения достоверности контроля, в нее введены инвертор, детекторы, пороговый усилитель и сумматоры, причем
первый вход одного сумматора соединен с одной роторной обмоткой контрольного синуснокосинусного трансформатора через инвертор, второй вход с другой обмоткой - непосредственно, а выход через первый детектор и инвертор - с первым входом второго сумматора, второй вход которого через второй детектор соединен с выходом третьего сумматора, входы которого соединены с роторными обмотками контрольного синусно-косинусного трансформатора, а выход второго сумматора через пороговый усилитель - с индикатором.
J6

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО Для КОНТРОЛЯ СИНХРОННО-СЛЕДЯЩИХСИСТЕМ | 1969 |
|
SU251649A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1968 |
|
SU217485A1 |
| Устройство для измерения магнитного курса | 1978 |
|
SU769329A1 |
| Устройство для контроля обрыва и короткого замыкания цепей фазовращателя на основе синусно-косинусного вращающегося трансформатора с квадратурным питанием обмоток возбуждения | 1982 |
|
SU1027649A1 |
| Устройство для передачи сигналов угловых перемещений | 1979 |
|
SU773679A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СЛЕДЯЩЕЙ СИСТЕМЫ | 1979 |
|
SU826287A1 |
| Устройство для контроля систем автоматического регулирования | 1978 |
|
SU1841197A1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2013 |
|
RU2533305C1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1993 |
|
RU2087026C1 |
| Устройство для измерения параметров ветра | 1980 |
|
SU932406A1 |