Изобретение относится к преобрааоватепям угловых перетлещений в код и может быть испопьэс«ано в измерительной технике и автоматике.
Известно устройство для передачи сигналов угловых перетлещаний, содержащее последовательно включенные синусно-косинусные трансформаторы (СКТ), датчиК| , усилитель и блок управления ij
Недостатком устройства является ма- ,« лая точность.
Известно также устройство для передачи сигналов угловых перемещений, содержащее генератор опорного напряжения, блок управления и последовательно вкпю- ,5 ченные СКТ датчик и СКТ приемник 2.
В таких устройствах при идеально выполненных СКТ сигнал рассогласования, сформированный на выходе вторичной (ро торной) обмотки СКТ приемника, в об- 20 щем случае определяется уравнением:
()o, где N - число пар полюсов СКТ,
(jLj й измеряемые угловые положения роторов СКТ датчика и приемника, сОваадакяцие с угловыми положениями роторных обмоток СКТ; WQ - частота опорного напряжения.
Откуда при Уряс О угловые положения роторов СКТ датчика и приемника равны друг другу, т. е.
Ыо 1Ьо
Однако на практике иэ-за различных погрешностей сигнал рассогласования на выходе СКТ приемника при oig Ьо определяется уравнением:
(2)
VQ(V пoгpV5 пЧi,
Ц
где Unf,.,- полезный сигнал, определяемый /
уравнением 11);
Unorp- сигнал-помеха, определяемый
угловой погрешностью д (рСо) передачи угла
о (°.1
и
логр.
37736794
Как показывает практика угловая пог-; ся характер в функции от измеряемого решность угла такик устройств, гпавнымугла . Известно, что угловая погрешобр ом, определяется инструмеатальньн ми погрешностями СКТ датчика и приемника и имеет периодический повторяютдий
ъьо«.
«
iK2 2
N
ДФ K)(NoL,t ot)f (2Nol oi2HV АФ4 () ) амплитуда первой гармоники, обуспевпенная наличием остаточного напржЕжения во вторичных обмотках СКТ датчика и приемника;1( - амплитуда второй гармоники обусловленнаяг главным образом амплитудой и уг-ловой неортогональностью (асш 1метрией) вы ходных напряжений, (роторных обмоток) СКТ датчика и приемника, &ФХ - амплитуда четвертой гармоники, обусловленная несинусоидальностью закона изменения выкод ных напряясений СКТ датчика и приемника от измеряемого угла, N - число пар полюсов СКТ, для двухполюсных СКТ ,N 1, дпя многополюсньк СКТ N 1, Кроме указанных выше факторов, определяющих амплитуды Дф, , Д$,АФ4 первой, второй и четвертой гармоник на точность, устройства в некоторых случаях, например при использовании в качестве датчика и приемника индуктосинов, значительное влияние оказывают погрешности усилителей мощности, установленных на выходе статорных обмоток СКТ датчика для увеличе тя его выходных сиг налов, а, следовательно, и отношения сигнал-шум. Как известно, погрешности усилителей приводят к увеличению амплитуд второй (ДФ2 и первой (Д Ф гармо ник. Так как по технологическим и эксплуатационным причинам устранить указанные выше погрешности невозможно, то в связи с этим возникает задача уменьшения этих погрешностей за счет изменения структурной схемы устройства. Цель изобретения - повышение точности устройства. Поставленная цель достигается тем, что в устройство для передачи сигналов угловых перемещений, содержащее генера тор опорного напряжения, блок управлени и последовательно включенные СКТ да-гность йФ|(оСд передачи угла практически определяется суммой трех гармоник с
периодами
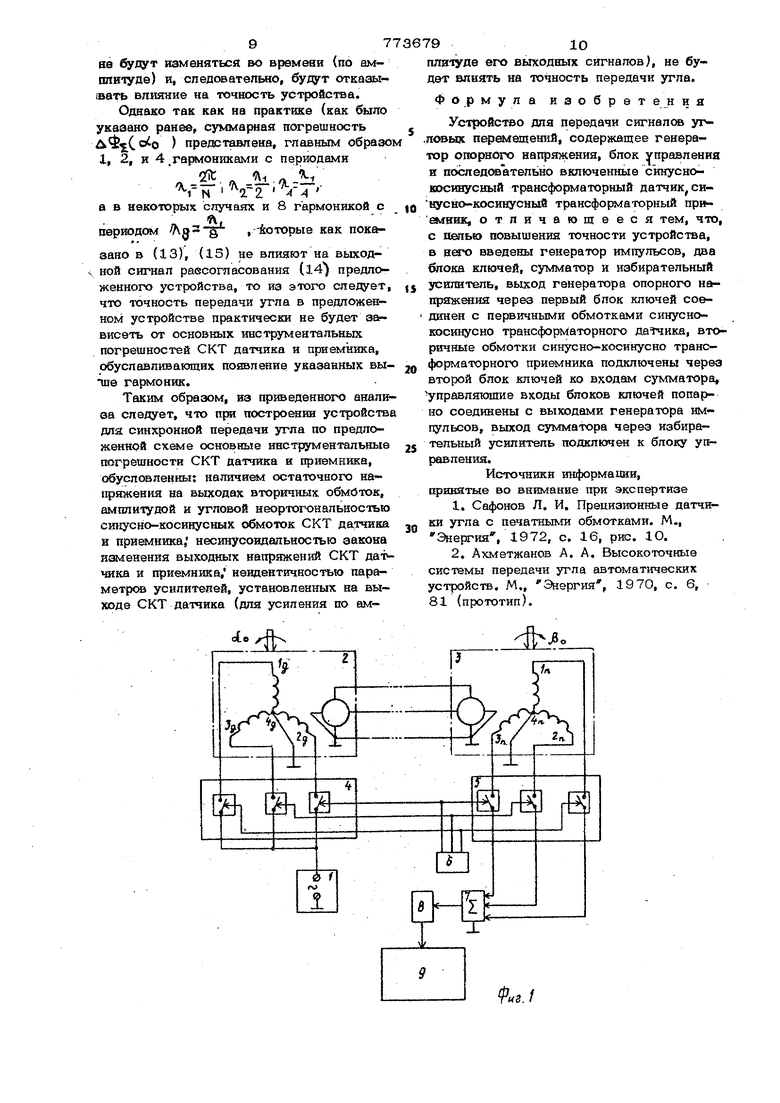
VT чик и СКТ приемник, введены генератор 1змпульсов, два блока ключей, сумматор и избирательный усилитель, выход генератора опорного напряжения через первый блок ключей соединен с первичными обмотками СКТ датчика, вторичные обмотки СКТ приемника подключены через второй блок ключей ко входам сумматора, управляющие входы блоков ключей попарно соединены с выходами генератора импульсов, выход сумматора через избиратепьный усилитель подключен к блоку управпения, На фйГо 1 представлена структурная схема устройства; на фиг, 2 изображены диаграммы работы устройства. Устройство состоит из генератора 1 опорного напряжения, СКТ датчика 2 и прий 1ника 3, первого и второго блоков ключей 4 и 5, генератора 6 импульсов, сумматора 7, избирательного усилителя 8 и блока 9 управления. СКТ датчик имеет три трехфазные пар вичные (роторные) обмотки IP , 2р , Зо и две вторичные двухфаз 1ые (синуоная и косинусная) обмотки. СКТ приемник имеет две первичные двухфазные обмотки и три вторичные трехфазные (роторные) обмотки In , 2h, 3h . Трехфазные обмотки СКТ сдвинуты между собой в прос транс ТВ е на угол -тг где Ц число пар полкхзов СКТ. Выход генератора 1 опорного напряжения через первый блок ключей 4 подключен к первичным обмоткам СКТ датчика 2, выходные обмотки которого подключены к первичным обмоткам СКТ приемника 3. Вторичные обмотки СКТ приемника 3 через второй блок ключей 5 подключены к сумматору 7, выход которого через избй рательный усилитель 8, настроенный на частоту генератора 1 опорного напряжения, подключен к входу блока управления. Выходы генератора 6 импульсов подключены к соответствующим коммутирующим входам блока ключей 4 и 5. Устройство работает следующим обрезом. На выходе гвиера1х ра 1 опорного напряжения формируется переменное напряжение с частотой (л)о синусоидальной или прямоугольной формы, которое поступает на сигнальные входы ключей первого бло ка кйючей 4. На выходах генератора 6 импульсов последовательно во времени за период Т формируются тактовые гфямоугольные импульсы с длительностью , . . « частотой иЗ - . причем тактовые импульсы на выкодах генератора смещены во времени относи™ тепьно друг друга на величину равную Тактовые импульсы, сформированные на первом, втором и третьем выходах генератора 6 импульсов, поступают соответственно напервые, вторые и треть.и коммутирующие входы Споков ключей 4 и 5, За период кo iмyтaции Ту в первый Т промежуток времени Q t на первом выходе генератора 6 импульсов будет присутствовать импульс, который установит первые ключи блоков ключей 4 и 5 в замкнутое положение, при этом пер вичная (Ig - g 7 обмотка СКТ датчика 2 будет подключаться к генератору опорного напряжения 1, а первая вторичная обмотка (In - 4п ) СКТ приемника 3 подключится ко входу сумматора 7. Во второй промежуток времени --4-. во втором выходе генератора 6 импульсов появится коммутирующий импульс, который установит вторые ключи блоков ключей 4 и 5 в замкнутое положение, при этом вторые обмотки (2g ) и(2п -4h) СКТ датчика и приемника подключатся соответственно к выходу генератора 1 опорного напряжении и ко входу сумматора 7. В третий промежуток времени , на третьем выходе генератора 6 импульсо появится коммутирующий импульс, который установит третьи ключи блоков ключей 4 и 5 в замкнутое положение, при этом тр&тьи обмотки (3g - 4g} и (Зп - 4П ) СКТ датчика и Приемника подключатся соответственно к выходу генератора 1 опорного напряжения и ко вкоду сумматора 7. В результате последовательной во врэКэнй сттехронной коммутации первичны 77 9-4 (роторных) обмоток СКТ датчика и одноименных вторичных (роторных) обмоток СКТ приемника выходное напряжение опо{ ного генератора 1 напряжения будет песледовательно во времени поступать на запитку первичных обмоток СКТ датчика 2 при этом выходные напряжения вторичных обмоток СКТ приемника 3 также последовательно во времени будут поступать на вход к сумматору 7. Так как первичные (роторные) обмотки СКТ датчика так же, как и вторичные (роторные) обмотки СКТ приемника смещ&ны в пространстве относительно друг друl Oга KS I то в результате коммутации в роторЙ1х обмотках СКТ датчика и пр емника будет сформировано 3-шаговое импупьсное вращение векторов пульсирующего ПОЛЯ с частотой UJy равной частоте оммутации U)vj. у. На фиг. 2 а, показаны угловые положения векторов пульсирующего поля в роторных обмотках СКТ датчика и приемника в пределах первого Ти в разные моменпериода комму та ты времени. Из фиг. 2 а следует, что импульсное угловое перемещение векторов пульсирую пя в роторных обмотках СКТ дат приемника, происходящее за счет коммутации роторных обмоток СКТ, может быть и представлено в виде: ()()(4) P oW-ibo iK(-) где otg - начальное угловое положение вектора пульсирующего поля (возникающего в первой роторной обмотке СКТ), принятое за начальное угловое положение . СКТ датчика, Otjj0) - угловое положение вектора пульС1фующего поля СКТ датчика в разные моменты времени Э при 04ti-Tr т )12.0° при Ъ „240° при fT 4t4TK. - начальное угловое положение вектора пульсирующего поля (возникающего в первой роторной обмотке СКТ приемника), . принятое за начальное угловое положение ротора СКТ приемника, .777 (b) угловое положение вектора пульсирукнцего поля СКТ приемника в разные моменты времени причйл иа (5), (б) видно, что AoC|(t) ,iC-t). После подставки (4), (5), (6) в (2) находим, что уравнение сигнала рассогласования на выходе сумматора 11 будет погр Ь ot, ))(8) ()}С) или ТОН, как Aot(t)A (-t), то ) Иа холученного уравнения видно, что в реаультате синхронной коммутации роторных обмоток СКТ амплитуда полэаного сигнала рассогласования UnQ S) не иаменяется от времени и совпадает с уравнением полезного сигнала (1) извест ного устройства (в котором отсутствует коммутация роторных обмоток СКТ), а амплитуда сигнала-помехи (9), определяющего угловую погрешность &f(.() устройства принимает временньш характер Для определения сигнал а-помехи (9), воаникающего при коммутации роторных обмоток СКТ датчика и приемника (на фиг. 2, б), в качестве примера показан процесс формирования сигнала-помехи (9) при условии, что N 1, а суммарная угловая погрешность йф, () устройст на первой, второй и третьей гармониками вида A$(pCQ)(()tu4 (j+c{ ) лф sir.(boCo+ot H) Из фиг. 2 б видно, что при шаге поворота вектора пульсирующего поля равном - 120 (что имеет место при использовании 3-х фазных СКТ датчика и приемника) первая и вторая гармоники вида (oQ) и 9 ДФоСоЧ) принимают временный арактер, проявляясь в виде синусоидальнотупенчатых напряжений й.Ф,(оСо)идФ следующих с частотой iOy, причем амплитуды ступенчатых напряжений равны зна-, чениям гармоник А$ (о.о) и Л$, С csto ) , в точках o(o,, (см. иг, 2, б). Амплитудь третьей гармоники АФ() но изменяется и во времени и определяется уравнением Д Фь (0,-) iSin((,,j Синусоидально-ступенчатые функши A$(c5(Q,t) иЛФ2(о ) известно, могут быть представлены в форме ряда Фурье (в виде отдельных гармоник с час тотой Юу , 2СОк, , 3 СОк . . .) вида A(d)/i$/ i е1п(,)(2u) .{11) )- u$Ji-6in(u))isin(,jy)t..(i2) После подстановки (11), (12) в (7) находим, что сигнал рассогласования на выходе сумматора принимает вид Vc noASm o (u),))(l3) Из этого следует, что при U)| С Ц)р погрешности дФ(оСо,Ь) и Лф(оСо,ЬЛ представляющие суммарную погрешность Ф„.) устройства могут быть от фильтрованы избирательным усилителем, как помеха, и, следовательно, не будет оказьшать влияние на точность устройс-гва, В этом случае Upc5ic UnoASinWo1;, тае пол & Сс о-5Ьо) Аналогично выше изложенному можно показать, что в том случае, если суммарная погрешность АЧ.(о) будет представленная 1, 2, 3, 4, 5, 6, ... гармониками вида (Ю), в ре льтате импульсной коммутации обмоток (образующей импульоное вращение вектора пульсидгющего поля) гармоники с периодами /х-./Л-5j./ .b-ft- i: X-Ь, . VfT ViVTVe 7-T . . . временный характер и, следовательно, могут быть отфильтрованы как помеха, а гармоники с периодами л . л -lil . л вв будут изменяться во времени (по амплитуде) и, спедсеатепьно, &утуг откааы1Ввть влияние на точность устройс-геа. Однако так как на практике (как было указано ранее, суммарная погрешность ) представлена, главным образо I, 2, и 4 .га илониками с периодами л 2fit , г; VTTVr-VTа в некоторых случаях и 8 гармоникой с периодом , -Которые как показано в (13), (15) не влияют на выходV ной сигнал раесошасования (14) предложенного устройства, то из этого что точность передачи угла в предложенном устройстве практически не будет загвисеть от основных инструментальных погрешностей СКТ датчика и приемника, обуславливающих появление указанных rafHrfOHHK. Таким образом, из приведенного анали за следует, что при построении устройств для синхронной передачи угла по предложенной схеме основные инструментальные погрешности СКТ датчика и приемника, обусловленны: наличием остаточного напряжения на выходах вторичных обмбток, амплитудой и угловой неортогональностью сикусно-косинусных обмоток СКТ датчика и приемника, несинусондаяьностью закона яаленения выходных напряжений СКТ датчика и приемника, неидентичностью параметрснз усилителей, установленных на выходе СКТ датчика (для усиления по ам779 плитуде его выходных сигналов), не будет влиять на точность передачи угла. Формула изобретения Устройство для передачи сигналов уг.ловых перолещений, содержащее генератор опорного напряжения, блок управления и последсюательно включенные синусновосинусный трансформаторный датчик синусно-косинусный трансфоршаторный приемник, отличающееся тем, что, с оепыа повышения точности устройства, в него введены генератор импульсов, два блока ключей, сумматор и избирательный усилитель, выход генератора опорного напряжения через первый блок ключей соединен с первичными обмотками синусновосинусно трансформаторного , вторичные обмотки синусно-косинусно трансформаторного приемника подключены через второй блок ключей ко входам сумматора, правляющие входы блоков ключей попарно соединены с выходами генератора импульсов, выэсод сумматора через избирательный усилитель подключен к блоку управления. Источники информации, кринятые во внимание при экспертизе 1.Сафонов Л. И. Прецизионные датчики угла с печатными обмотками. М., Энергия, 1972, с. 16, рис. 1О. 2.Ахметжанов А. А. Высокоточные системы передачи угла автоматических устройств, М., Энергия, 1970, с. б, 81 (прототип).
Hpi
njyu
«./
(do)
(- eiAVJ {c(o) 4 y; ido
ч7
у
AV.
к.
J20
jm
Гк
do
Mi)
Af,(ct0,f;


| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СЛЕДЯЩЕЙ СИСТЕМЫ | 1979 |
|
SU826287A1 |
| Преобразователь угла поворота валаВ КОд | 1979 |
|
SU840998A1 |
| Преобразователь угла поворота вала в код | 1978 |
|
SU752428A1 |
| Преобразователь угла поворотаВАлА B КОд | 1979 |
|
SU801024A1 |
| Преобразователь угла поворота вала в код | 1978 |
|
SU781866A1 |
| Преобразователь угловых перемещений вала в код | 1978 |
|
SU785882A1 |
| Преобразователь угла поворота вала в код | 1980 |
|
SU866570A1 |
| Преобразователь угловых перемещений в код | 1978 |
|
SU743002A1 |
| Преобразователь угла поворота вала в код | 1980 |
|
SU942097A1 |
| УСТРОЙСТВО ДЛЯ КАРОТАЖНЫХ ЭЛЕКТРОМАГНИТНЫХ СКАНИРУЮЩИХ ЗОНДИРОВАНИЙ | 2010 |
|
RU2421760C1 |

дГз(°.0
