1
Изобретение касается дистанционных и автоматических средств сварки, резки и контроля материалов и может найти применение, например, для передвижения сварочной головки, резака для газовой или плазменной резки или дефектоскопа по поверхности стальных изделий.
Известно самоходное магнитное устройство для перемещения по поверхности ферромагнитного тела, содержащее магнитные траки, шарнирно соединенные между собой в бесконечную цепь, надетую на ведущую и ведомую звездочки, установленные на раме, и опорные катки траков, причем катки установлены на каждом траке и взаимодействуют с упругими прямоугольными направляющими переменного по длине сечения, при этом направляющие расположены на раме вдоль рабочих ветвей цепи С1Г.
Известная конструкция обеспечивает надежность удержания и плавность перемещения в горизонтальном и потолочном положениях, однако во всех остальных пространственных положениях, особенно при перемещении по вертикальной плоскости параллельно земле, в ней имеет место наличие
паразитных сил трения, возникающих между цепью и звездочками в шарнирах цепи, а также между катками и торцами осей, на которых они посажены, что приводит к затиранию и заклиниванию цепи, нарушая плавность перемещения. Кроме того, наличие опорных катков на каждом из траков цепи усложняет конструкцию, снижает надежность
10 и увеличивает вес устройства.
Целью изобретения является повышение надежности и плавности перемещения при сварке в любых пространственных положениях и упрощение конструк15ции.
Указанная цель достигается тем, что боковая поверхность магнитных траков выполнена Г-образной, а опорные катки разбиты на группы,в каждой
20 из которых соседние катки расположены во взаимно перпендикулярных плоскостях в контакте с Г-образной поверхностью магнитных траков,при этом расстояние между осями соседних
25 опорных катков отлично от величины, равной или кратной шагу цепи.
С целью обеспечения перемещения по криволинейной поверхности на раме шарнирно установлены серьги,при этом каждая группа опорных катков смонтирована на соответствующей ей серьге, а ведомая звездочка подпружинена по отношению к раме.
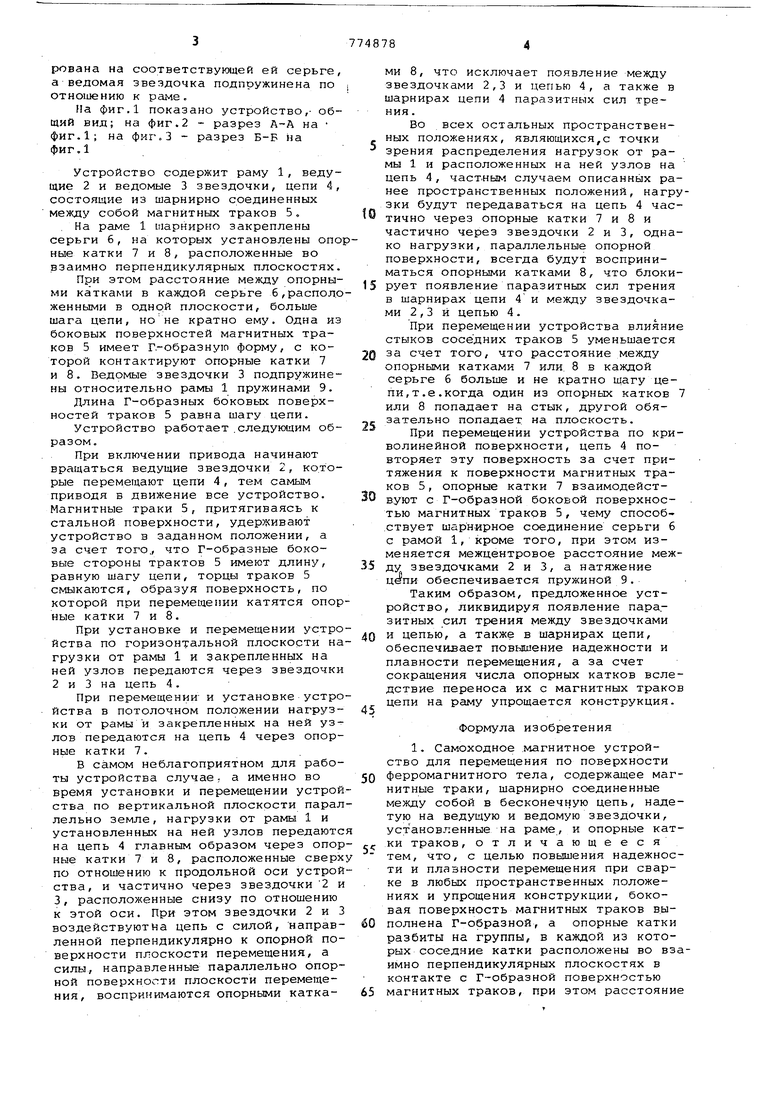
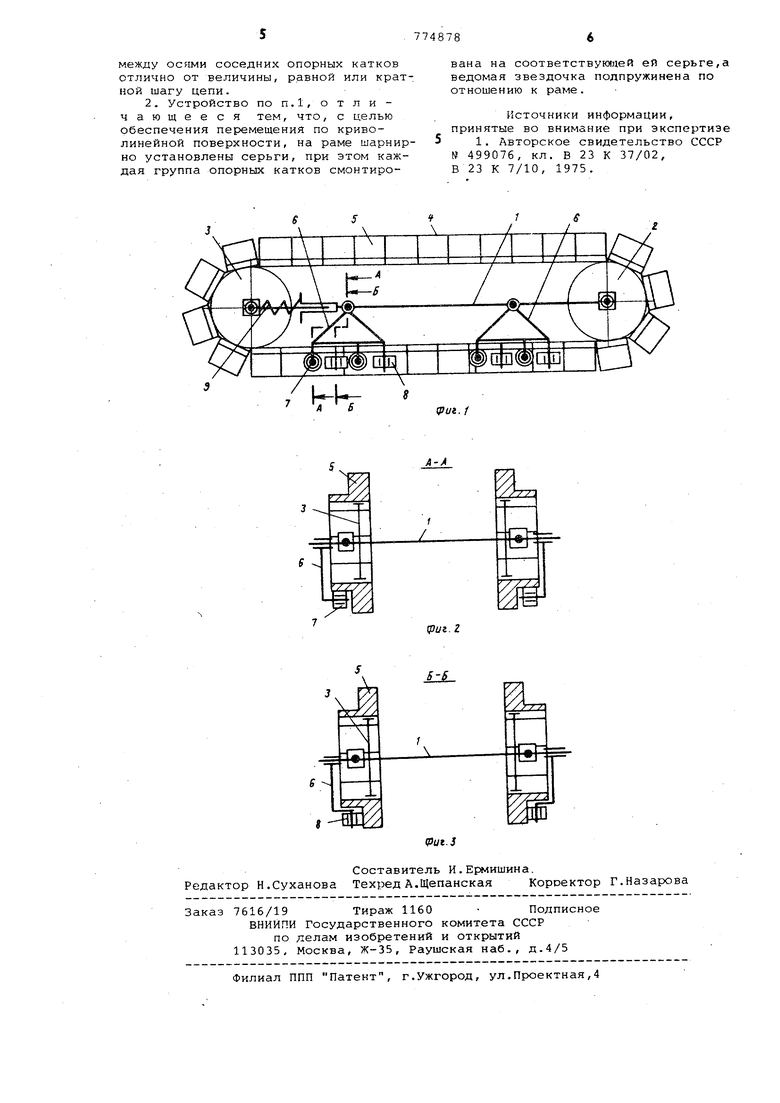
Ма фиг.1 показано устройство,- общий вид; на фиг. 2 - разрез А-А на фиг.1; на фиг.З - разрез Б-Е на фиг.1
Устройство содержит раму 1, ведущие 2 и ведомые 3 звездочки, цепи 4, состоящие из шарнирно соединенных между собой магнитных траков 5,
, На раме 1 шарнирно закреплены серьги 6, на которых установлены опорные катки 7 и 8, расположенные во взаимно перпендикулярных плоскостях.
При этом расстояние между опорными катками в каждой серьге 6,расположенными в однс;й плоскости, больше шага цепи, но не кратно ему. Одна из боковых поверхностей магнитных траков 5 имеет Г.-образную форму, с которой контактируют опорные катки 7 и 8. Ведомые звездочки 3 подпружинены относительно рамы 1 пружинами 9.
Длина Г-образных боковых поверхностей траков 5 равна шагу цепи.
Устройство работает .следующим образом.
При включении привода начинают вращаться ведущие звездочки 2, которые перемещают цепи 4, тем самым приводя в движение все устройство. Магнитные траки 5, притягиваясь к стальной поверхности, удер)ивают устройство в заданном положении, а за счет того., что Г-образные боковые стороны трактов 5 имеют длину, равную шагу цепи, торцы траков 5 смыкаются, образуя поверхность, по которой при перемещении катятся опорные катки 7 и 8.
При установке и перемещении устройства по горизонтальной плоскости нагрузки от рамы 1 и закрепленных на ней узлов передаются через звездочки 2 и 3 на цепь 4.
При перемещении- и установке устройства в потолочном положении нагрузки от рамы и закрепленных на ней узлов передаются на цепь 4 через опорные катки 7.
В са.мом неблагоприятном для работы устройства случае, а именно во время установки и перемещении устройства по вертикальной плоскости параллельно земле, нагрузки от рамы 1 и установленных на ней узлов передаются на цепь 4 главным образом через опорные катки 7 и 8, расположенные сверху по отношению к продольной оси устройства, и частично через звездочки 2 и 3, расположенные снизу по отношению к этой оси. При этом звездочки 2 и 3 воздействуютиа цепь с силой, направленной перпендикулярно к опорной поверхности плоскости перемещения, а силы, направленные параллельно опорной поверхности плоскости перемещения, воспринимаются опорными катками 8, что исключает появление между звездочками 2,3 и цепью 4, а также в шарнирах цепи 4 паразитных сил трения.
Во всех остальных пространственных положениях, являющихся,с точки зрения распределения нагрузок от рамы 1 и расположенных на ней узлов на цепь 4, частным случаем описанных ранее пространственных положений, нагрузки будут передаваться на цепь 4 частично через опорные катки 7 и 8 и частично через звездочки 2 и 3, однако нагрузки, параллельные опорной поверхности, всегда будут восприниматься опорными катками 8, что блокирует появление паразитных сил трения в шарнирах цепи 4 и между звездочками 2,3 и цепью 4.
При перемещении устройства влияние стыков соседних траков 5 уменьшается за счет того, что расстояние между опорными катками 7 или 8 в каждой серьге б больше и не кратно шагу цепи, т.е. когда один из опорных катков или 8 попадает на стык, другой обязательно попадает на плоскость.
При перемещении устройства по криволинейной поверхности, цепь 4 повторяет эту поверхность за счет притяжения к поверхности магнитных траков 5, опорные катки 7 взаимодействуют с Г-образной боковой поверхностью магнитных траков 5, чему способствует шарнирное соединение серьги 6 с рамой 1, кроме того, при этом изменяется межцентровое расстояние между звездочками 2 и 3, а натяжение цепи обеспечивается пружиной 9.
Таким образом, предложенное устройство, ликвидируя появление пара.зитных сил трения между звездочками и цепью, а также в шарнирах цепи, обеспечивает повышение надежности и плавности перемещения, а за счет сокращения числа опорных катков вследствие переноса их с магнитных траков цепи на peiMy упрощается конструкция.
Формула изобретения
1. Самоходное магнитное устройство для перемещения по поверхности ферромагнитного тела, содержащее магнитные траки, шарнирно соединенные между собой в бесконечную цепь, надетую на ведущую и ведомую звездочки, установленные на раме, и опорные катки траков, отличающееся тем. Что, с целью повышения надежности и плавности перемещения при сварке в любых пространственных положениях и упрощения конструкции, боковая поверхность магнитных траков выполнена Г-образной, а опорные катки разбиты на группы, в каждой из которых соседние катки расположены во взаимно перпендикулярных плоскостях в контакте с Г-образной поверхностью магнитных траков, при этом расстояние
между осями соседних опорных катков отлично от величины, равной или кратной шагу цепи.
2. Устройство по п.1,отличающееся тем, что, с целью обеспечения перемещения по криволинейной поверхности, на раме шарнирно установлены серьги, при этом каждая группа опорных катков смонтирована на соответствующей ей серьге,а ведомая звездочка подпружинена по отношению к раме.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 499076, кл. В 23 К 37/02, В 23 К 7/10, 1975.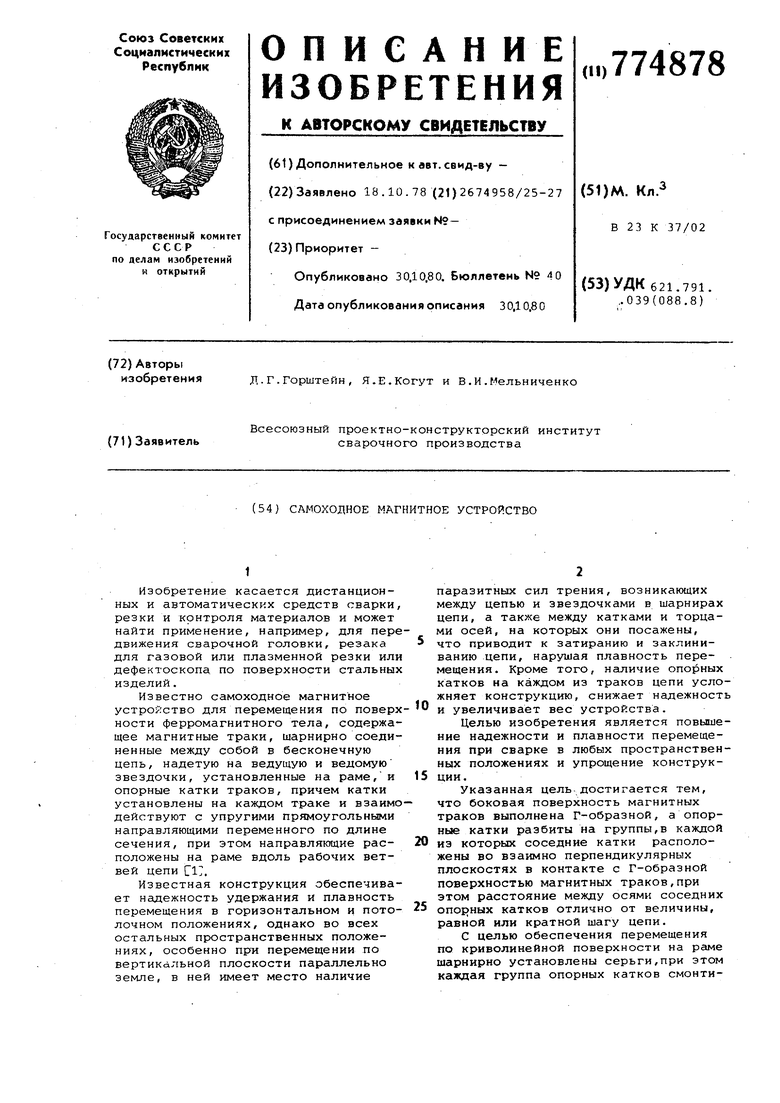
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для прижима кромок изделия при сварке | 1989 |
|
SU1609601A1 |
| УСТРОЙСТВО ДЛЯ ПОВЫШЕНИЯ ПРОХОДИМОСТИ ТРАНСПОРТНЫХ СРЕДСТВ | 1993 |
|
RU2037446C1 |
| ДВИЖИТЕЛЬ ГУСЕНИЧНОЙ МАШИНЫ | 2006 |
|
RU2340506C2 |
| УСТРОЙСТВО ДЛЯ САМОВЫТАСКИВАНИЯ ТРАНСПОРТНОГО СРЕДСТВА С ГУСЕНИЧНЫМ ДВИЖИТЕЛЕМ | 1993 |
|
RU2037447C1 |
| ВАЛКООБРАЗОВАТЕЛЬ ПЛОДОВ БАХЧЕВЫХ КУЛЬТУР | 2006 |
|
RU2315465C1 |
| Гусеничный движитель с обводом из шарнирно сочлененных металлических траков | 1990 |
|
SU1703538A1 |
| ЭСКАЛАТОР МЕТРОПОЛИТЕНА | 2012 |
|
RU2506220C1 |
| Сборное звено гусеничной цепи | 2020 |
|
RU2749744C1 |
| МАШИНА ДЛЯ ДОБЫЧИ КОРНЕЙ И КОРНЕВИЩ ЛАКРИЦЫ В ЕСТЕСТВЕННЫХ ЗАРОСЛЯХ И НА ПЛАНТАЦИЯХ КУЛЬТУРЫ СОЛОДКИ GLYCYRRHIZA GLABRA L. И GLYCYRRHIZA URALENSIS FISCH | 1999 |
|
RU2156561C1 |
| ХОДОВАЯ ЧАСТЬ ГУСЕНИЧНОЙ МАШИНЫ "ЛАСКОВЫЙ ЗВЕРЬ" | 1992 |
|
RU2006407C1 |
