Изобретение относится к транспортному оборудованию непрерывного действия, а именно к эскалаторам метрополитена с устройствами для улавливания ступенчатого полотна при обрыве тяговых цепей.
Известен принятый за прототип эскалатор метрополитена, содержащий раму, ступенчатое полотно с закрепленными на каркасах ступенями, каждая из которых опирается на два основных и два вспомогательных катка с возможностью их опирания на направляющие и перемещения по ним, при соединении ступенчатого полотна с двумя бесконечно замкнутыми на верхней тяговой и нижней натяжной звездочках пластинчатыми втулочно-роликовыми тяговыми цепями, устройства для улавливания ступенчатого полотна при обрыве тяговых цепей в виде установленных на тяговых цепях упоров с возможностью их взаимодействия с установленным на раме шинами при обрыве тяговых цепей (Большая Советская энциклопедия. М.: Советская энциклопедия, т.30, с.730-731, рис.1, 2).
Однако практика эксплуатации эскалаторов известной конструкции показала недостаточную надежность их улавливающих устройств, приводящих к возникновению аварийных ситуаций. Кроме того, для проверки и оценки работоспособности улавливающих устройств необходимо периодически дополнительно останавливать эскалатор, что увеличивает время простоев эскалатора и трудоемкость его обслуживания.
Техническим результатом изобретения является обеспечение надежного улавливания верхней ветви ступенчатого полотна при возможном обрыве тяговых цепей.
Технический результат достигается тем, что в эскалаторе метрополитена, содержащем раму, ступенчатое полотно с закрепленными на каркасах ступенями, каждая из которых опирается на два основных и два вспомогательных катка с возможностью их опирания на направляющие и перемещения по ним, при соединении ступенчатого полотна с двумя бесконечно замкнутыми на верхней тяговой и нижней натяжной звездочках пластинчатыми втулочно-роликовыми тяговыми цепями, устройства для улавливания ступенчатого полотна при обрыве тяговых цепей, устройства для улавливания ступенчатого полотна при обрыве тяговых цепей предназначены для улавливания верхней ветви ступенчатого полотна и выполнены в виде размещенных по обе стороны от ступенчатого полотна над направляющими для основных катков с одинаковым шагом по длине эскалатора, кратным шагу основных ходовых катков, и шарнирно закрепленных на раме с возможностью поворота в вертикальной плоскости рычагов Г-образной формы с плоскими поверхностями их обеих частей, ориентированными в поперечном относительно продольной оси эскалатора направлении, при этом длина участка каждого рычага, связанного с шарнирным узлом его крепления к раме, принята больше диаметра основных ходовых катков, а измеренная по нормали к опорной поверхности направляющей высота размещения оси каждого шарнира над направляющей принята равной длине примыкающего к шарниру участка Г-образного рычага, при нормальной работе эскалатора примыкающие к шарнирам участки Г-образных рычагов размещены параллельно направляющим с ориентацией отогнутых частей рычагов нормально вверх по отношению к направляющим и взаимодействием рычагов с упорами, каждый упор выполнен с отогнутой в сторону натяжной звездочки кромкой с ее расположением под участком рычага, расположенного параллельно направляющим, и с возможностью поддержания рычага в исходном положении, верхние части упоров закреплены на стальных проволочных канатах, соединенных верхним концами с размещенными в зоне установки тяговой звездочки эскалатора приводами электровинтового типа с возможностью продольного смещения канатов, а нижние концы канатов связаны с противовесами, стальные проволочные канаты размещены с возможностью их опирания на закрепленные на раме опоры скольжения, расположенные с одинаковым шагом по длине эскалатора, при этом приводы стальных проволочных канатов и привод тяговой звездочки электрически связаны с датчиком обрыва тяговых цепей, при срабатывании которого отключается привод тяговой звездочки с ее затормаживанием и включаются приводы стальных проволочных канатов.
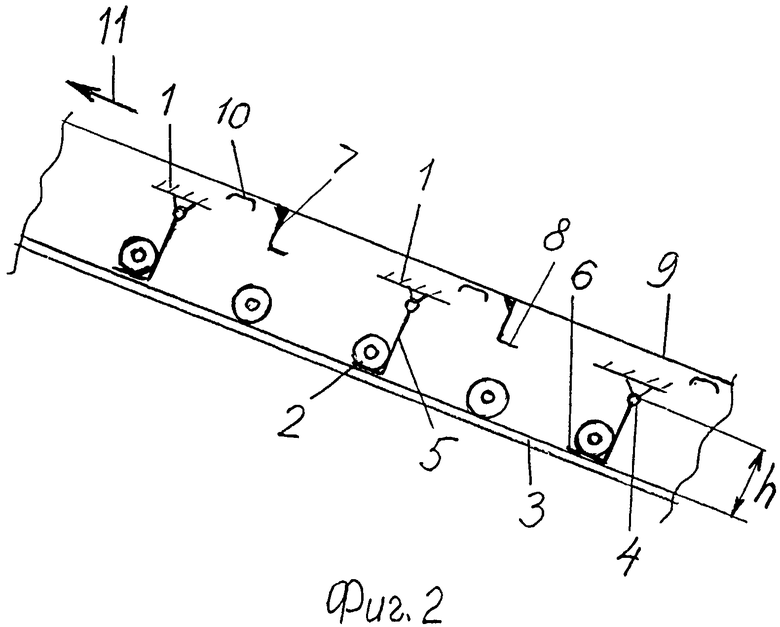
Фрагменты средней части эскалатора показаны на фиг.1 - с положением элементов улавливающего устройства с одной из сторон ступенчатого полотна при нормальной работе эскалатора, на фиг.2 - то же, при улавливании верхней ветви ступенчатого полотна при обрыве тяговых цепей.
Эскалатор метрополитена содержит раму 1, ступенчатое полотно с закрепленными на каркасах ступенями (не показаны), каждая из которых опирается на два основных катка 2 и два вспомогательных катка (не показаны) с возможностью их опирания на направляющие 3 и перемещения по ним. Ступенчатое полотно соединено с двумя бесконечно замкнутыми на верхней тяговой и нижней натяжной звездочках (не показаны) пластинчатыми втулочно-роликовыми тяговыми цепями (не показаны). Устройства для улавливания ступенчатого полотна при обрыве тяговых цепей предназначены для улавливания верхней ветви ступенчатого полотна и выполнены в виде размещенных по обе стороны от ступенчатого полотна над направляющими 3 для основных катков 2 с одинаковым шагом по длине эскалатора, кратным шагу основных ходовых катков 2, и шарнирно 4 закрепленных на раме 1 с возможностью поворота в вертикальной плоскости рычагов Г-образной формы с плоскими поверхностями их обеих частей 5 и 6, ориентированными в поперечном относительно продольной оси эскалатора направлении. При этом длина l участка 5 каждого рычага, связанного с шарнирным узлом 4 его крепления к раме 1, принята больше диаметра d основных ходовых катков 2, а измеренная по нормали к опорной поверхности направляющей 3 высота h размещения оси каждого шарнира 4 над направляющей 3 принята равной длине l примыкающего к шарниру 4 участка 5 Г-образного рычага. При нормальной работе эскалатора (фиг.1) примыкающие к шарнирам 4 участки 5 Г-образных рычагов размещены параллельно направляющим 3 с ориентацией отогнутых частей 6 рычагов нормально вверх по отношению к направляющим 3 и взаимодействием рычагов 5, 6 с упорами 7. Каждый упор 7 выполнен с отогнутой в сторону натяжной звездочки кромкой 8 с ее расположением под участком 5 рычага, расположенного параллельно направляющим 3, и с возможностью поддержания рычага 5, 6 в исходном положении. Верхние части упоров 7 закреплены на стальных проволочных канатах 9, соединенных верхним концами с размещенными в зоне установки тяговой звездочки эскалатора приводами электровинтового типа (не показаны) с возможностью продольного смещения канатов 9, а нижние концы канатов 9 связаны с противовесами (не показаны). Стальные проволочные канаты 9 размещены с возможностью их опирания на закрепленные на раме 1 опоры скольжения 10, расположенные с одинаковым шагом по длине эскалатора. Приводы стальных проволочных канатов 9 и привод тяговой звездочки электрически связаны с датчиком обрыва (не показан) тяговых цепей, при срабатывании которого отключается привод тяговой звездочки с ее затормаживанием и включаются приводы стальных проволочных канатов 9. 11 - направление движения стальных проволочных канатов 10 при улавливания ступенчатого полотна.
Эскалатор действует следующим образом. При нормальной работе эскалатора положение элементов улавливающих устройств (фиг.1) - Г-образных рычагов 5, 6, упоров 7, 8 и стальных проволочных канатов 9 не препятствует движению ступенчатого полотна с тяговыми цепями и ходовыми катками - основными 2 и вспомогательными, т.к. рычаги Г-образной формы 5, 6 удерживаются от поворота вниз относительно шарниров 4 упорами 7, 8, которые прижимаются к отогнутым частям 6 Г-образных рычагов за счет натяжения стальных проволочных канатов 9 с помощью размещенных в нижней части эскалатора противовесов и поддержания другой составляющей 5 каждого рычага с помощью отогнутой в сторону этой составляющей кромки 8 упора 7.
При возможном обрыве тяговых цепей по сигналу датчика их обрыва выключается привод тяговых звездочек с их затормаживанием и включаются приводы стальных проволочных канатов 9, которые, преодолевая их натяжения от противовесов, смещают канаты 9 вверх в направлении 11. Благодаря этому упоры 7, 8 отходят от Г-образных рычагов 5, 6, которые под действием собственного веса поворачиваются относительно шарниров 4 против часовой стрелки (фиг.2) и упираются поверхностями своих отогнутых частей 6 в направляющие 3, размещаясь параллельно с ними над их верхними опорными поверхностями. За счет прижатия движущимися вниз ходовыми катками 2 частей 6 к направляющим 3 и упора ходовых катков 2 в части 5 Г-образных рычагов отогнутые части 6 рычагов дополнительно прижимаются к направляющим 3, благодаря чему обеспечивается надежное затормаживание ступенчатого полотна и его удержание. Так как поворот Г-образных рычагов 5, 6 происходит после минимального смещения закрепленных на канатах 9 упоров 7, 8, время срабатывания улавливающих устройств до контакта ходовых катков 2 с Г-образными рычагами 5, 6 минимальное, благодаря чему смещающееся вниз ступенчатое полотно до его затормаживания смещается не более чем на величину шага между катками 2, поэтому не успевает приобрести значительную скорость, что ограничивает динамические составляющие нагрузок от ходовых катков 2 на Г-образные рычаги 5, 6. Благодаря очень незначительной величине осевого смещения канатов 9, обеспечивающих срабатывание улавливающих устройств, в качестве приводов канатов приняты малогабаритные электровинтовые толкатели, что упрощает их монтаж и обслуживание. За счет отсутствия контактов движущихся элементов ступенчатого полотна при нормальной работе эскалатора с элементами улавливающих устройств исключается возможность выхода их из строя, что исключает также необходимость частой их проверки.
Таким образом, отличительные признаки изобретения обеспечивают не только надежность улавливания ступенчатого полотна при обрыве тяговых цепей, но и обеспечивают уменьшение трудоемкости обслуживания эскалатора.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКС ДЛЯ ПОДЪЕМА АВТОМОБИЛЕЙ-САМОСВАЛОВ НА БОРТ КАРЬЕРА И ИХ СПУСКА В КАРЬЕР | 2006 |
|
RU2305189C1 |
| КАРЬЕРНЫЙ ПОДЪЕМНИК ДЛЯ АВТОМОБИЛЕЙ-САМОСВАЛОВ | 2005 |
|
RU2287477C1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2006 |
|
RU2326041C1 |
| НАКЛОННЫЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2007 |
|
RU2342301C1 |
| НАКЛОННЫЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2006 |
|
RU2327625C1 |
| НАКЛОННЫЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2006 |
|
RU2326040C1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2005 |
|
RU2279390C1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2009 |
|
RU2396198C1 |
| КРУТОНАКЛОННЫЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2005 |
|
RU2279392C1 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА АВТОМОБИЛЕЙ-САМОСВАЛОВ НА БОРТ КАРЬЕРА | 2005 |
|
RU2284959C1 |
Эскалатор метрополитена содержит раму, ступенчатое полотно с закрепленными на каркасах ступенями, каждая из которых опирается на два основных и два вспомогательных катка с возможностью их опирания на направляющие и перемещения по ним при соединении ступенчатого полотна с двумя бесконечно замкнутыми на верхней тяговой и нижней натяжной звездочках пластинчатыми втулочно-роликовыми тяговыми цепями. Устройства для улавливания ступенчатого полотна при обрыве тяговых цепей предназначены для улавливания верхней ветви ступенчатого полотна. Эти устройства выполнены в виде размещенных по обе стороны от ступенчатого полотна над направляющими для основных катков с одинаковым шагом по длине эскалатора, кратным шагу основных ходовых катков, и шарнирно закрепленных на раме с возможностью поворота в вертикальной плоскости рычагов Г-образной формы с плоскими поверхностями их обеих частей, ориентированными в поперечном относительно продольной оси эскалатора направлении. Длина участка каждого рычага, связанного с шарнирным узлом его крепления к раме, принята больше диаметра основных ходовых катков, а измеренная по нормали к опорной поверхности направляющей высота размещения оси каждого шарнира над направляющей принята равной длине примыкающего к шарниру участка Г-образного рычага. Изобретение обеспечивает повышение надежности улавливания ветви ступенчатого полотна. 2 ил.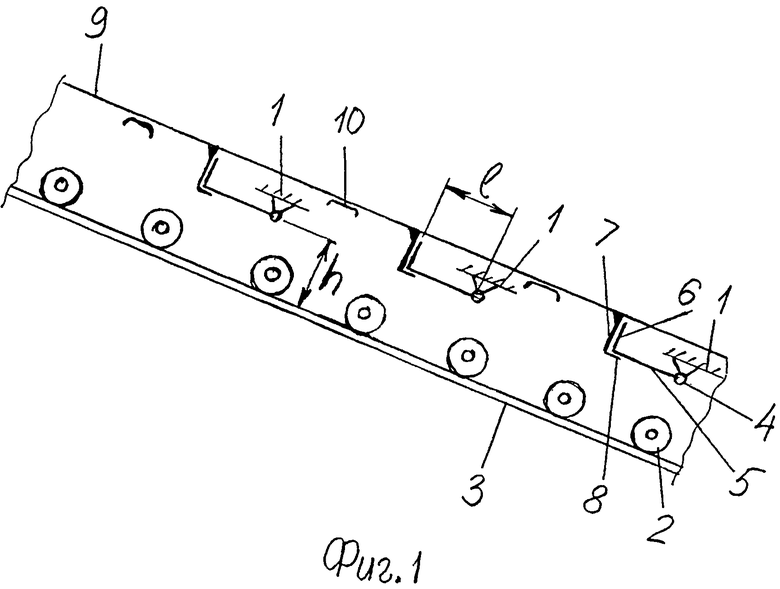
Эскалатор метрополитена, содержащий раму, ступенчатое полотно с закрепленными на каркасах ступенями, каждая из которых опирается на два основных и два вспомогательных катка с возможностью их опирания на направляющие и перемещения по ним, при соединении ступенчатого полотна с двумя бесконечно замкнутыми на верхней тяговой и нижней натяжной звездочках пластинчатыми втулочно-роликовыми тяговыми цепями, устройства для улавливания ступенчатого полотна при обрыве тяговых цепей, отличающийся тем, что устройства для улавливания ступенчатого полотна при обрыве тяговых цепей предназначены для улавливания верхней ветви ступенчатого полотна и выполнены в виде размещенных по обе стороны от ступенчатого полотна над направляющими для основных катков с одинаковым шагом по длине эскалатора, кратным шагу основных ходовых катков, и шарнирно закрепленных на раме с возможностью поворота в вертикальной плоскости рычагов Г-образной формы с плоскими поверхностями их обеих частей, ориентированными в поперечном относительно продольной оси эскалатора направлении, при этом длина участка каждого рычага, связанного с шарнирным узлом его крепления к раме, принята больше диаметра основных ходовых катков, а измеренная по нормали к опорной поверхности направляющей высота размещения оси каждого шарнира над направляющей принята равной длине примыкающего к шарниру участка Г-образного рычага, при нормальной работе эскалатора примыкающие к шарнирам участки Г-образных рычагов размещены параллельно направляющим с ориентацией отогнутых частей рычагов нормально вверх по отношению к направляющим и взаимодействием рычагов с упорами, каждый упор выполнен с отогнутой в сторону натяжной звездочки кромкой с ее расположением под участком рычага, расположенного параллельно направляющим, и с возможностью поддержания рычага в исходном положении, верхние части упоров закреплены на стальных проволочных канатах, соединенных верхним концами с размещенными в зоне установки тяговой звездочки эскалатора приводами электровинтового типа с возможностью продольного смещения канатов, а нижние концы канатов связаны с противовесами, стальные проволочные канаты размещены с возможностью их опирания на закрепленные на раме опоры скольжения, расположенные с одинаковым шагом по длине эскалатора, при этом приводы стальных проволочных канатов и привод тяговой звездочки электрически связаны с датчиком обрыва тяговых цепей, при срабатывании которого отключается привод тяговой звездочки с ее затормаживанием и включаются приводы стальных проволочных канатов.
| Большая Советская энциклопедия | |||
| - М.: Советская энциклопедия, 1978, т.30, с.730-731, рис.1, 2 | |||
| Несущее полотно эскалатора | 1986 |
|
SU1312051A1 |
| МАШИНА ДЛЯ ДВУХСТОРОННЕГО ПЕЧАТАНИЯ ЛЕНТ ДЛЯ ТЕСЕМОЧНЫХ РУЛЕТОК | 1930 |
|
SU21906A1 |
| Игра | 1930 |
|
SU21775A1 |
| WO 2011080489 A1, 07.07.2011 | |||
| КОМПОЗИЦИЯ НАТРИЕВО-КАЛЬЦИЕВО-СИЛИКАТНОГО СТЕКЛА ДЛЯ КОНТЕЙНЕРОВ (ВАРИАНТЫ) И СТЕКЛЯННЫЙ КОНТЕЙНЕР | 1999 |
|
RU2211809C2 |
| JP H0 6329380 A, 29.11.1994. | |||

