(54) МЕХАНИЗИРОВАННАЯ КРЕПЬ ДЛЯ ОТРАБОТКИ КРУТЫХ ПЛАСТОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизированная крепь | 1972 |
|
SU486135A1 |
| Механизированная крепь | 1982 |
|
SU1143851A1 |
| Способ управления механизированным комплексом в профильной плоскости пласта в направлении движения | 1978 |
|
SU775334A1 |
| Механизированная крепь | 1982 |
|
SU1055887A1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ ДЛЯ КРУТЫХ ПЛАСТОВ | 2009 |
|
RU2411362C1 |
| Механизированная крепь для мощных крутых и наклонных пластов | 1986 |
|
SU1453038A1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ ДЛЯ КРУТЫХ ПЛАСТОВ | 2007 |
|
RU2357083C1 |
| Механизированный комплекс для отработки мощных крутых угольных пластов | 1983 |
|
SU1222846A1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ ДЛЯ КРУТЫХ ПЛАСТОВ | 2009 |
|
RU2412355C1 |
| Очистной комплекс совмещенной выемки | 1988 |
|
SU1656135A1 |
Изобретение относится к горному делу, а конкретнее к механизированным крепям очистных забоев, и может быть использовано в механизированных крепях, предназначенных для крепутения боковых пород при обработке крутых пластов угля столбами по восстанию с закладкой выработанного пространства. Известна передвижная гидравлическая крепь, имеющая на каждой секции крепи верхние и нижние домкраты передвижения, при этом все секции крепи связаны через поперечину с двумя базовыми балками, а домкраты параллельны верхняку или основанию, однако и смещены по высоте относительно центров щарниров стоек и опорных поверхностей ползушек поперечин 1. Однако наличие двух базовых балок и их шарнирное соединение с поперечинами, а также выполнение связи поперечин с основаниями в виде одноподвижной поступательной кинематической пары не позволяет использовать эту крепь на крутых пластах. Наиболее близким к предлагаемому техническому решению является механизированная крепь для отработки крутых пластов угля, включающая секции крепи с передними и задними гидростойками для шарнирной связи оснований и верхняков и секционную базу, выполненную из шарнирно соединенных рам с направляющими для -выемочной машины и телескопических опор с гидродомкратами для взаимодействия с верхняками и основаниями и шарнирно связанную с последними верхними и нижними гидродомкратами передвижения, которые установлены в плоскости передвижения, параллельной гидростойкам, параллельно соответственно верхнякам и основаниям 2. Однако эта крепь не может обеспечить постоянство углового положения базы крепи в процессе ее движения по гипсометрии пласта, в процессе движения крепи происходит изменение углового положения, шага передвижения и подъема базы относительно основания в профильной плоскости, что делает невозможным автоматическое или программное управление движением крепи с комбайном в профильной плоскости.
Цель, изобретения - повыи ение точнос и viipaBJienHH перемещением базы при изMCUMiiiH гипсометрии илаета.
1()стаг ленная цель достигается тем, что центры птрпирных соединений верхних и нп/кпих гпдродомк)атов передвижения усlanoB.ieHbi но прямым линиям, соединяющим ючки контакта телескопических опор базы и цент)ы HjapHnpoB гидростоек секций кре1Н соогиетственно с верхняками и основаниями.
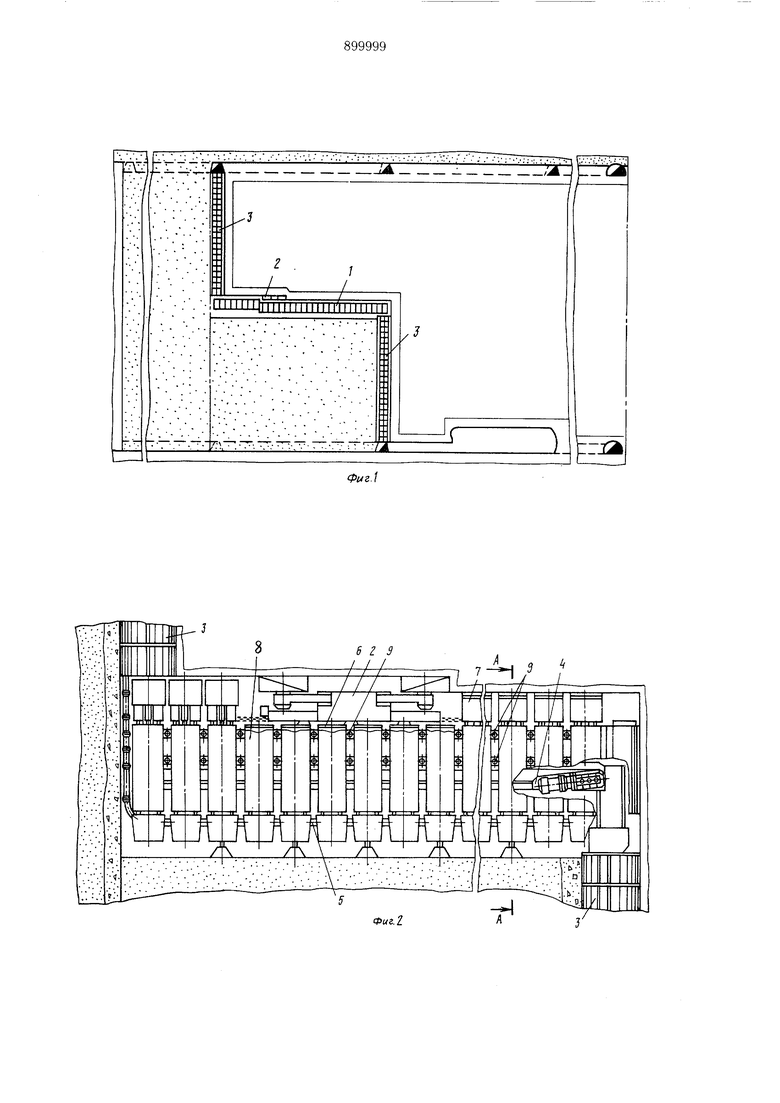
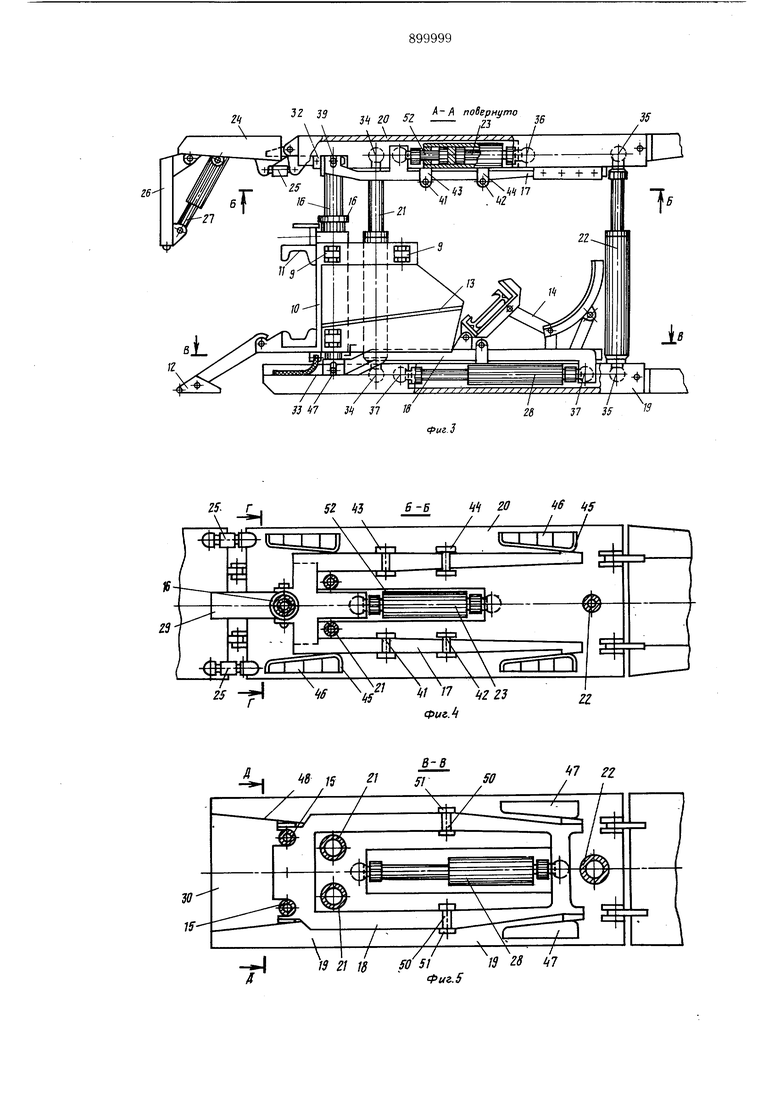
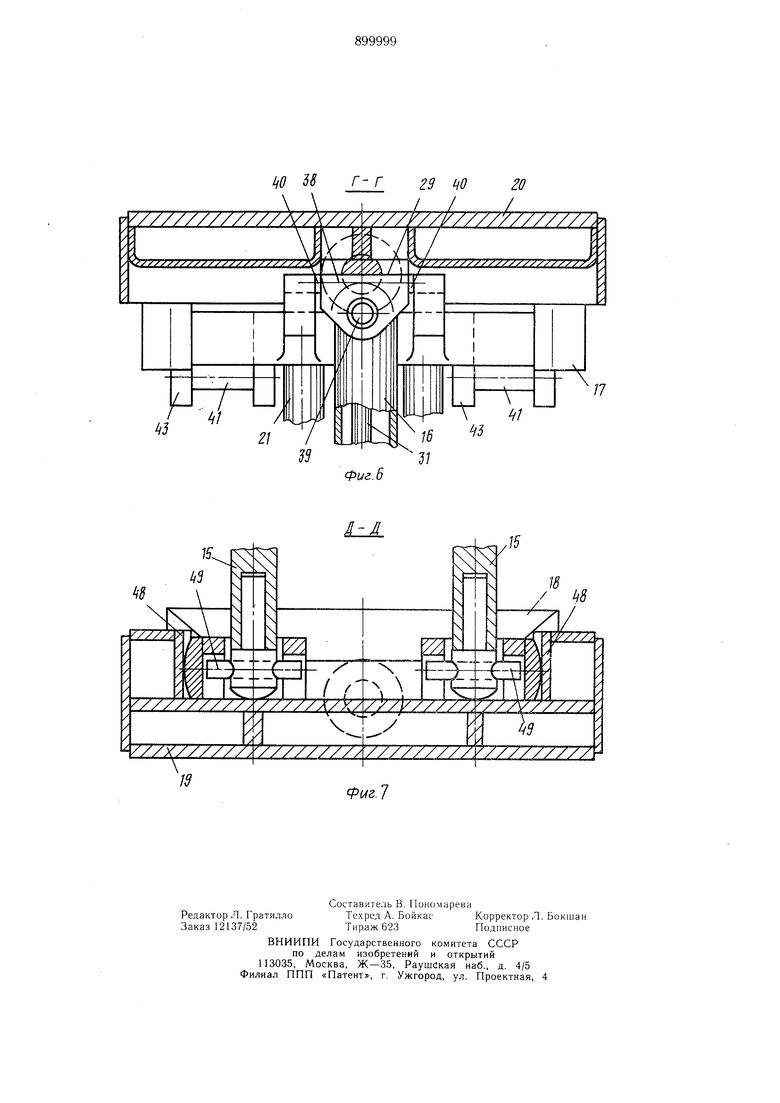
На фи1. 1 представлена технологическая схема отработки крутого пласта столбами по восстанию; па фиг. 2 - очистной комплекс, обилий вид в плане; на фиг. 3 -сечение А-А на (|)иг. 2; на фиг. 4 - сечение Б-Б на фиг. 3; на фиг. 5 - сечение В-В на фиг. 3; на фиг. 6 - сечение Г--Г па фиг. 4; на фиг. 7 - сечение Д-Д на фи1. 5.
Очистной механизированный комплекс для отработки крутых пластов столбами по восстанию с закладкой выработанного Г1рост|)анства включает механизированную крегпз 1, выемочный ко.мбайн 2, тюбинговую крень 3 для крепления скатов, конвейер 4 для транснортировки угля вдоль забоя до углеспускного ската, закладочное оборудовап1 е 5 для подачи распределения закладки вдоль забоя в выработанном пространстве.
Механизированная крень 1 включает базу 6 и секции 7 крепи. Каждой секции 7 крени 1 соответствует секция 8 базы 6, которые соедппепы между собой щарнирно замками 9. На раме 10 каждой секц;п1 базы устаповлены панравляющие 1 1 для выемочной машины - ко.мбайна 2, погрузочный носок 12, направляющий желоб 13 для спуска отбитого комбайном 2 угля на конвейер, опорный кpoнпJтeйн 14 секции конвейера, опорные гидропатроны 15, те.юскопическая опора двойной раздвижности 16, направляющая тяга 17 верхняка и Направляющая рамка 18 основания.
Каждая секция 7 Kpein-i 1 включает основание 19, верхпяк 20, две передние 21 и одну заднюю 22 стойки. Верхняк 20 свя, зан верхним гидродомкратом 23 передвижения с нанравляющей тягой 17. В нередней (забойной) части верхняк 20 имеет консоль
24,которая управляется гидропатронами
25,и щит 26 для кренления забоя, который поворачивается (поджимается к забою или складывается) домкрато.м 27. Основание 19 секции 7 крепи Г связано нижним гидродомкратом 28 нередвижения с нанравляющей рамкой 18. Верхние 23 и нижние 28 гидродомкраты передвижения секции крепи и базы гидравлически синхронизированы. Синхронизация выполпена за счет гидравлической связи , щтоковых полостей домкратов 23 и 28 между собой и отсутствия связи с напорной или сливной магистралью гидросистемы крепи.
Телескопическая опора 16 и гидропатроны 15 секции 8 базы б поджи.маются к опорным поверхностям 29 и 30 соответственно верхняка 30 и основания 19 гидродо.мкратом 31, расположенным внутри телескопа 16. Линии 32 и 33 опорных поверхностей 29 п 30 верхняка 30 и основания 19 в про(|)ильной нлоекости нроходят через центры наррщрных соединений 34 и 35.стоек с верхняком .и основанием. На этой же линии лежат оси и центры шарниров 36 и 37 верхпего и нижнего гидродомкратов 23 и 28 нередвижения.
Башмак 38 телесконической опоры 16 прижимается до.мкратом 31 к опорной поверхности 29 верхняка 20. Телескопическая
опора 16 и башмак 38 связаны сферической поверхностью и щарниро.м 39, обеснечиваюHUIMH постояпство плоского контакта башмака 38 с верхняком 20 нри его наклоне относительно телескопической опоры. Шарниры 40 баш.мака 38 связывают его с наO правляющей тягой 17, которая всегда параллельна верхняку 20, благодаря ноддерживающи.м ее осям 41 и 42 в проушинах 43 и 44 верхпяка 20. Угловые и линейные смещения секций 8 базы 6 в плоскости
J нласта обеспечены на верхняке, б:1агодаря клиньям 45 с унругими элементами 46, а на основании, благодаря жестким клиньям 47 и 48. Зазор для разворота или бокового смешения появляется при передвижении базь 6 к забою при зарубке комбайна 2.
0 Направляющая ра.мка 18 на основании 19 соединена со штоками гидропатронов 15 шарнирами 49. Нанравляюнгая рамка 18 все1да параллельна основанию, благодаря осям 50 в npoyiHnnax 51 ос 1ования 19. Верхний гидродомкрат 23 нередвижения выполпеп в одном ци,липдре с дополнительным домкрато.м 52 управления у1ловы.м по.южение.м базы в прО(Ьи;1ьной плоскости. В процессе обработки столба тюбинговая крепь на вентиляционном скате разбирается, а углеснускном скате возводится в закладываемом выработанном пространстве, а механизирован1 ая крень 1 с комбайном 2, конвейером 4 и закладочным оборудованием 5 движется, соверн1ая выемочные цик;1ы, по восстанию, опираясь на боковые породы (почву и кровлю) или в исключительных случаях тфи обрушении кровли (ночвы) и потере кренью раснора за счет опоры на закладку.
Зарубка комбайна 2 производится при передвижении базы 6 на забой одновременно на каждой четвертой секции крени но длине забоя. Верхние гидродомкраты передвижения 23 передвигают телескопы 16 секций 8 базы через направляющие тяги 17, а нижние гидродомкраты передвижения 28 передвигают рамы 10 секции 8 базы 6 через нанравляющую рамку 18. Носкольку оси гидродомкратов нередвижения
23 и 28 и точки контактов опор 15 и 38 базы 6 находятся в профильной плоскости на одних линиях с центрами шарниров гидростоек с основанием 19 и верхняком 20, а сами домкраты 23 и 28 установлены параллельно соответственно верхнякам 20 и основаниям 19, то изменение углового положения оснований и верхняков происходяnj,ero при движении их по кровле и почве пласта, очень мало влияет на положение базы 6 в пространстве относительно неподвижной системы координат, например связанной с линией горизонта или вертикали.
При движении вдоль верхняка 20 направляющие тяги 17 выходят из контакта с клиньями 45 и появляется гарантированный боковой зазор, обеспечивающий возможность смещения базы 6 вдоль забоя или компенсации изменения положения базы 6 при ее развороте. Упругие элементы 46 позволяют верхнякам 20 смещаться нормально вдоль продольной оси верхняков 20 при смещении кровли вдоль забоя без поломок металлоконструкции верхняков 20 или тяг 17.
Аналогично при движении направляющих рамок 18 вместе с базой б вдоль основания 19 они выходят из контакта с клиньями 47 и 48 оснований 19. При этом образуется гарантированный боковой зазор, который дает возможность базе 6 смещаться на эту величину вдоль забоя или разворачиваться в плоскости пласта относительно оснований 19. Величина зарубки и захват комбайна 2 определяется величиной (щагом) передвижения базы 6 на забой. Рабочие органы комбайна 2 при зарубке вращаются, выгружая отбитый при зарубке уголь в окна между секциями 8 базы 6 на конвейер 4. Зарубившись и произведя концевые операции по отбойке угля в зоне зарубки между шнеками, ко.мбайн 2 перемещают по направляющим 11 базы 6 вдоль забоя, при этом отбивают уголь по всей .мощности пласта (слоя) и по погрузочным носкам 12 -через окна между секциями 8 базы 6 отбитый уголь под собственным весом по желобам 13 смещается на конвейер 4, который транспортирует его вдоль крепи 1 к углеспускному скату. При движении комбайна 2 вдоль крепи щитки 26 отводятся от забоя перед комбайном, возвращаются и крепят забой после выдвижения консолей 24 верхняков 20. Операция по передвижке секций 7 крепи 1 может быть совмещена с выемкой угля комбайном 2 или предшествовать ей. Секция 7 крепи 1 подтягиваются.
Секции 7 подтягиваются к базе 6 гидродомкратами передвижения 23 и 28, предварительно разгрузив гидростойки 21 н 22 или
поставив их на подпор. В случае наличия в гидростойках 21 и 22 подпора секции 7 передвигают без отрыва от кровли и почвы. В конечном положении секции 7 крепи 1, благодаря направляющим тягам 17 и рам-, кам 18, клиньям 45, 47 и 48, фиксируются по базе 6.
После передвижки секций 7 крепи 1 и снятия комбайно.м 2 ленты угля по длине забоя выемочный цикл заканчивается.
Закладку выработанного пространства производят при благоприятных условиях один раз в смену после 6 выемочных циклов, при неблагоприятных горно-геологических условиях - после каждого выемочного цикла.
Такое выполнение механизированной крепи позволяет обеспечить постоянное задаваемое оператором угловое положение базы 6 крепи 1 в пространстве независимо от гипсометрии пласта и этим самым значительно уменьшить ошибки управления движением очистного комплекса по гипсометрии пласта из-за крепи 1, что исключает присечку породы в почве и кровле, а также оставление угольной пачки в почве или кровле пласта.
25
Формула изобретения
Механизированная крепь для отработки круглых пластов угля включающая секции крепи с передними и задни.ми гидростойка.ми для шарнирной связи оснований и верхняков и секционную базу, выполненную из шарнирно соединенных рам с направляющими для выемочной машины и телескопических опор с гидродомкратами для взаимодействия с верхняками и основаниями и шарнирно связанную с последними верхними и нижними гидродомкратами передвижения, которые установлены в плоскости передвижения, параллельно соответственно
верхнякам и основания.м, отличающаяся тем, что, с целью повыщекия точности управления перемещением базы при изменении гипсометрии пласта, центры шарнирных соединений, верхних и нижних гидродомкратов передвижения установлены по прямым линиям, соединяющим точки контакта телескопических опор базы и центры шарниров гидростоек секций крепи соответственно с верхняками и основаниями. Источники информации,
принятые во внимание при экспертизе
№ 603751, кл. Е 21 D 23/00, 1975 (прототип). 3 3 j 20 51 ± поЪернугг о X гI
26 / / / / Л 7 J J7 8 I I 37 И y
I // /
19 Л J$ 50 51
К 7
13 23 Ц7
Фиг.5 EZ liO 38 г- г 23 40 I/ /
LiA.
игЛ 20 /
