(54) КОДОВЫЙ ПЕРЕКЛЮЧАТЕЛЬ
f
Изобретение относится к элементам систем автоматического контроля и регулирования и может быть испольэовано в частности, в.измерительных системах для испытаний, авиационной техни-5 ки для установки цифровых данных, соответствующих номеру режима полета и выдачи установленных данных в потенциальном двоично-десятичном коде. Изобретение является усовершенство- tO ванием технического решения по авторскому свидетельству № 675468.
По основному ав. св. № 675468 известен кодовый переключатель, содержащий корпус, крышку с токоподводами, 15 маховик со шкалой и контактным диском и контактную группу. В полости маховика размещены две изоляционные прокладки с отверстиями, гофрированная шайба, фигурная пружина и вкла- 20 дьш с пазами и отверстием. Контактная группа выполнена в виде расположенных в обойме стержней и размещена между указанными прокладками. Одна из прокладок через гофрированную шай- 25 бу прижата к контактному диску фигурной пружиной, размещенной в пазах вклгщышаг, а другая этой же фигурной пружиной прижата к крышке. При этом обойма введена в отверстия прокладок 30
и отверстие вкладыша, а стержни установлены с возможностью взаимодействия одними своими концами с контактным диском, а другими - с дополнительно закрепленными на крышке контактными элементами. Каждый из контактных элементов выполнен по крайней мере из двух проволок, имеющих дугообразный участок. Сторона обоймы, обращенная к крышке, выполнена в виде гребенки, между выступами которой расположены контактные элементы и стержни.
Недостатком известного переключателя является отсутствие возможности дистанционной установки цифровых данных или их изменения, что ограничивает возможность использования переключателя в аппаратуре, размещенной в труднодоступных местах на объекте.
Целью изобретения является расширение функциональных возможностей. Это достигается тем, что кодовый переключатель снабжен электромагнитом, пружинами, роликом и рычагами , один из которых установлен на оси маховика, подпружинен одной из пружин и соединен с другим рычагом, на котором установлен ролик, взаимодейстующий с маховиком, и закреплен один онец другой пружины, другой конец оторой закреплен на третьем , вязанном с якорем через четвертый ычаг.
Такое конструктивное решение позоляет осуществлять как ручное, так дистанционное управление переключаелем.
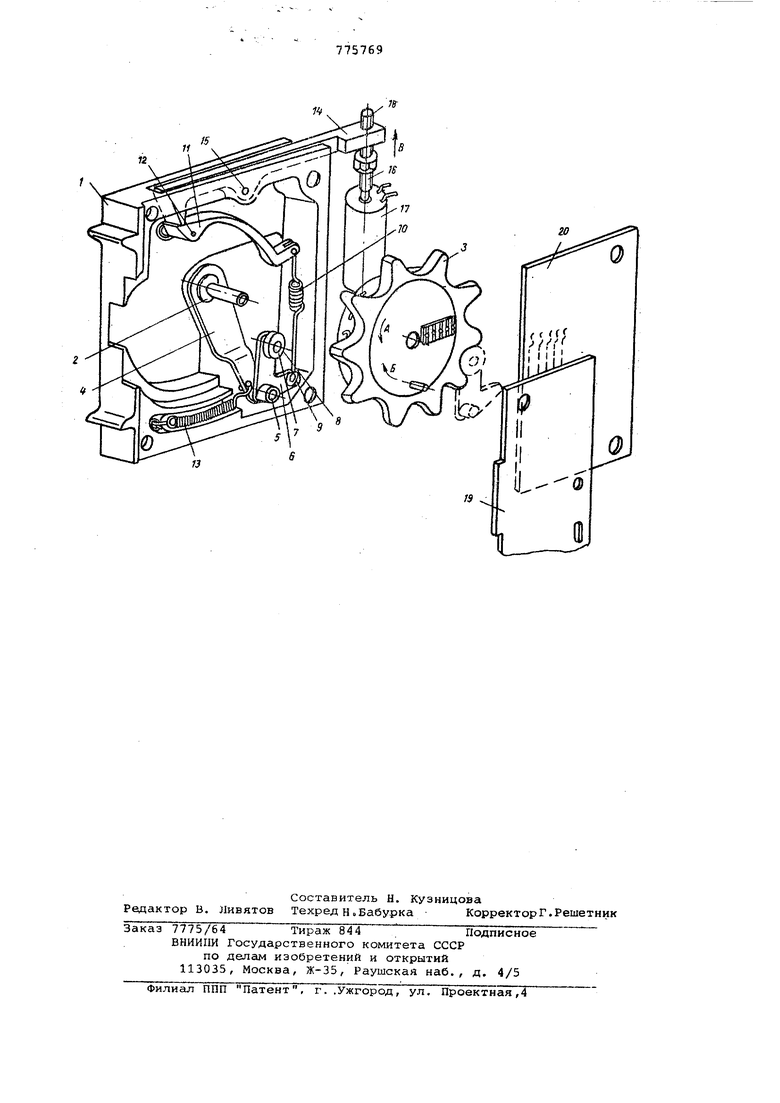
На чертеже изображен кодовый перелючатель .
Кодовый переключатель содержи;т корус 1, ось 2, на которой установлен аховик 3 со шкалой и с контактным иском; на оси 2 соосно с маховиком 3 установлен поворотный рычаг 4, на конце которого имеется палец 5, являющийся осью вращения второго рычага 6, на одном плече которого установлен ролик 7, западающий между двумя соседними выступами маховика 3 и имеющий возможность свободно вращаться вокруг своей оси 8. На другом конце второго рычага 6 установлен палец 9, к которому крепится один, конец пружины 10, другой ее конец шарнирно закреплен на одном плече третьего рычага 11, имеющего возможность поворачиваться на определенный угол вокруг своей оси 12 , в исходном положении, представленном на чертеже, указанная система рычагов, образующих замкнутый четырехзвенный механизм, удерживается возвратной пружиной 13, один конец которой крепится к корпусу 1, а другой - к рычагу 4. Другое плечо рычага 11 находится в контакте с выступом четвертого рычага 14, поворачивакхцимся на определенный угол вокруг оси 15 под воздействием усилия толкателя 16 якоря электромагнита 17, установленного на задней стенке корпуса 1, передаваемого на плечо рычага 14 через регулировочный винт 18. Механизм закрывается крышкой 19 и токосъемной крышкой 20.
Во внутренней полости маховика 3 помещены не показанные на чертеже кодовый (контактный) диск, фиксируемый относительно маховика 3, две прокладки из электроизоляционного, материаила, фигурная пружина/ гофрированная шайба и обойма. Кодовый диск закрыт первой прокладкой. В; прокладке имеется прямоугольный паз (отверстие), в который входит обойма. За прокладкой установлена гс фрированная шайба, которая при помседи двух своих выступов, входящих в соответствующие пазы маховика 3, занимает внутри последнего фиксированное положение. Фиксация маховика 3 в десяти положениях осуществляется гофрированной шайбой с трехлопастной фигурной пружиной, которая расположена в соответствукхаих пазах вкладыша. Вкладыш расположен внутри маховика 3 на его ступиде и имеет паз для размещения обоймы и палец, входящий в соответствуютее отверстие
крышки 19, что обеспечивает неподвижное положение вкладыша относительно маховика 3. в пяти гнездах обоймы размещены пять контактных цилиндрических щеток-стержней, каждая из которых одним своим концом соприкасается с определенным участком контактной поверхности кодового диска. С противоположной стороны каждый стержень подпружинен, причем контактное усилие на каждом стержне создается контактной пружиной, состоящей из трех волосков, смонтированных на токосъемной крышке 20. С цепью повышения надежности контакта между стержнями и волосками сторона обоймы, обращенная к токосъемнойкрышке 20, выполнена в виде гребенки с шириной пазов, достаточной для размещения в них группы из трех волосков с небольшим зазором. На крышке 20, выполненной методом-фотохимического травления из фольгированного стеклотекстолита, имеются контактные пятачки, каждый из которых соединен печатным проводником с соответствующей группой волосков и служит для монтажа проводников внешних электрических цепей. Пьше-брызго защита элементов конструкции, расположенных внутри маховика 3, обеспечивается второй прокладкой, отличающейся от первой прокладки наличием отверстия для прохода пальца вкладыша. Вторая прокладка поджата фигурной пружиной к крышкам 19 и 20, крепящимся к корпусу 1.
Работа кодового переключателя может осуществляться в режимах как ручного, так и дистанционного управления.
Работа кодового переключателя в ручном режиме происходит следующим образом.
При повороте маховика 3 из фиксированного положения поворачиваются вместе с ним кодовый диск и гофрированная шайба. Гофры шайбы вступгиот во взаимодействие с тремя лопастями фигурной пружины, которая стремится вернуть гофрированную шайбу и маховик 3 в прежнее фиксированное положение. При повороте маховика 3 на угол, больший 18, лопасти фигурной пружины взаимодействуют с противоположной (нисходящей стороной выступов гофрированной шайбы, стремясь довернуть ее и связанный с ней маховик 3 в новое фиксированное положение. Независимо от дгшьнейшего нажатия на выступ маховика 3 происходит щелчок - доворот маховика 3 и фиксация его в новом положении. При повороте маховика 3 контактные стержни , поджатые пружинами (волосками) к кодовому диску, оказь)ваются на новых участках его контактной поверхности, обеспечивая переключение выходных сигналов в соответствии с новым угловым положением маховика 3.
При работе поворотного переключателя в режиме ручного управления ролик 7, обкатывая :;ь по выступам маховика 3 при повороте последнего, обеспечивае при помощи пружин 10 и 13 дополнител ную фиксацию маховика 3, причем при вращении шкального маховика 3 в направл.ении увеличения отсчетов (по стрелке А) работает на растяжение пржина 13, а при вращении маховика 3 в направлении уменьшения отсчетов (по стрелке Б) работает на растяжение пружина 10, так как кинематическая пара рычагов 11 и 14 жестко замкнута на находящейся в крайнем нижнем положении толкатель 16 электромагнита 17 и поворот рычага 6 по часовой стрелке при обкатывании роликом 7 соответственно выступа маховика 3 возможен при неподвижном рычаге 11 только за счет растяжения пружины 10
Работа механизма в режиме дистанционного управления происходит следующим образом.
При запитывании обмотки электромагнита 17 последний срабатывает и толкатель 16 через винт 18 передает усилие на плечо рычага 14(в направлении стрелки в)i Другое плечо рычага 14 опускается и рабочим выступом воздействует на. плечо рычага 11, который при этом поворачивается против часовой стрелки и через пружину 10 воздействует на плечо рычага б, стремясь развернуть его также против часовой стрелки вокруг пальца. Однакс ролик 7, упираясь в поверхность между двумя соседними выступами маховика 3, препятствует этому развороту рычага 6. При дальнейшем развороте (под действием толкателя 16 электромагнита 17/рычагов 14 и 11 пружина 10 продолжает тянуть вверх плечо рычага б, а поскольку.разворот последнего невозможен, то вертикальная составляющая этого усилия передается через палец 5 рычагу 4, который начи нает поворачиваться против часовой стрелки вокруг оси 2, преодолевая сопротивление пружины 13 и перемещая вверх рычаг 6 с роликом 7. Усилие электромагнита 17 при полнотл рабочем ходе соединенного с якорем толкателя 16 и жесткость пружин 10 и 13 выбраны такими, что при полном рабочем ходе толкателя 16 крутящий момент, создаваемый роликом 7 при его движении вверх на соответствующем выступе махоЁИка 3, превосходит по величине момент сопротивления вращению маховика, создаваемый встроенными элементами фиксации, размещенными в полости маховика 3. Таким образом, происходит полный разворот против часовой стрелки рычага 4 и перемещение в направлении снизу вверх рычага 6 с роликом 7, воздействующим на соответствующий выступ маховика 3 также в направлении снизу вверх, что и приводит к повороту маховика 3 на одно деление в направлении увеличения отсчетов (по стрелке А). При этом окон10чательная фиксация маховика 3 в новом положении по углу обеспечивается, как и в режиме ручного управления, встроенными в маховик 3 элементами фиксации, происходит щелчок.
15
При обесточивании обмотки электромагнита 17 освобождается якорь с толкателем 16 и под действием возвратной пружины 13 все участвовавшие в
0 работе кинематические звенья возвращаются в исходное положение, при этом ролик 7, опускаясь вместе с рычагом 6 в исходное нижнее положение, обкатывает соответствующий выступ
5 маховика 3 и западает во впадину между двумя соседними выступами. Поскольку при обкатывании выступов маховика 3 роликом 7 в направлении сверху вниз рычаг 6 имеет возможность поворачиваться по часовой стрел0ке, упора ролика 7 в выстугал маховика .3 не происходит. Момент, создаваемый роликом 7 на выступах маховика 3 при возвращении всей системы рычагов в исходное положение значи5тельно меньше момента сопротивления, создаваемого встроенными элементами фиксации, и самопроизвольного поворота маховика 3 в обратную сторону не происходит.
0
Формула изобретения
Кодовый переключатель по авт. св. I 675468, отличающийся
5 тем, что, с целью расширения функциональных возможностей, он снабжен электромагнитом, пружинами, роликом и рычагами, один из которых установлен на оси маховика, подпружинен од0ной из пружин и соединен с другим рычагом, на котором установлен ролик, взаимодействующий с маховиком, и закреплен один конец другой пружины, другой конец которой закреплен на третьем рычаге, связанном с яко5рем электромагнита через четвертый рычаг.
| название | год | авторы | номер документа |
|---|---|---|---|
| Поворотный переключатель | 1976 |
|
SU675468A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ЗАМОК | 1995 |
|
RU2098587C1 |
| ЗАМОК | 1997 |
|
RU2108436C1 |
| ПЕРЕСТАНОВОЧНЫЙ ЗАМОК | 2018 |
|
RU2691812C1 |
| Поворотный переключатель | 1976 |
|
SU653636A1 |
| КОДОВЫЙ ПРОГРАММИРУЕМЫЙ ЗАМОК | 1993 |
|
RU2034974C1 |
| Устройство натяжения провода | 1985 |
|
SU1312655A1 |
| ЗАМОК | 1995 |
|
RU2090720C1 |
| Устройство для управления группой исполнительных механизмов | 1986 |
|
SU1345180A1 |
| Лентопротяжный механизм | 1981 |
|
SU945896A1 |