Изобретение относится к машиностроению и может быть использовано в устройствах программного управления.
Целью изобретения является расширение функциональных возможностей устройства путем обеспечения работы устройства по нескольким программам без его перенастройки.
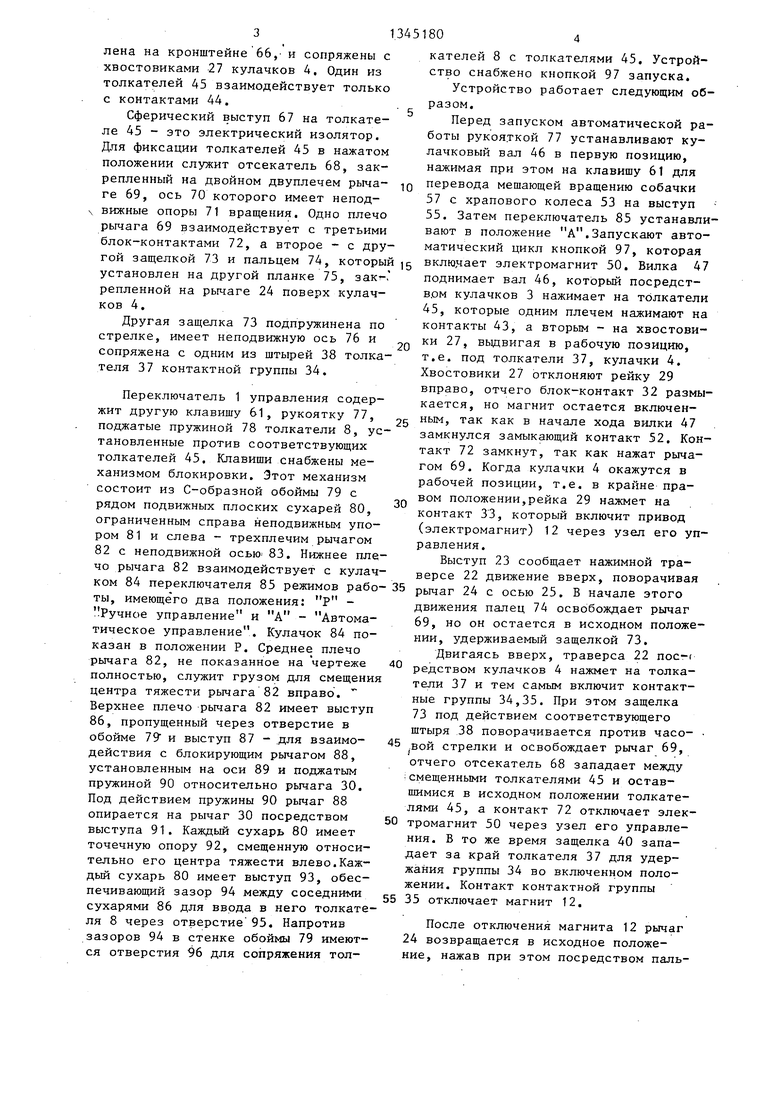
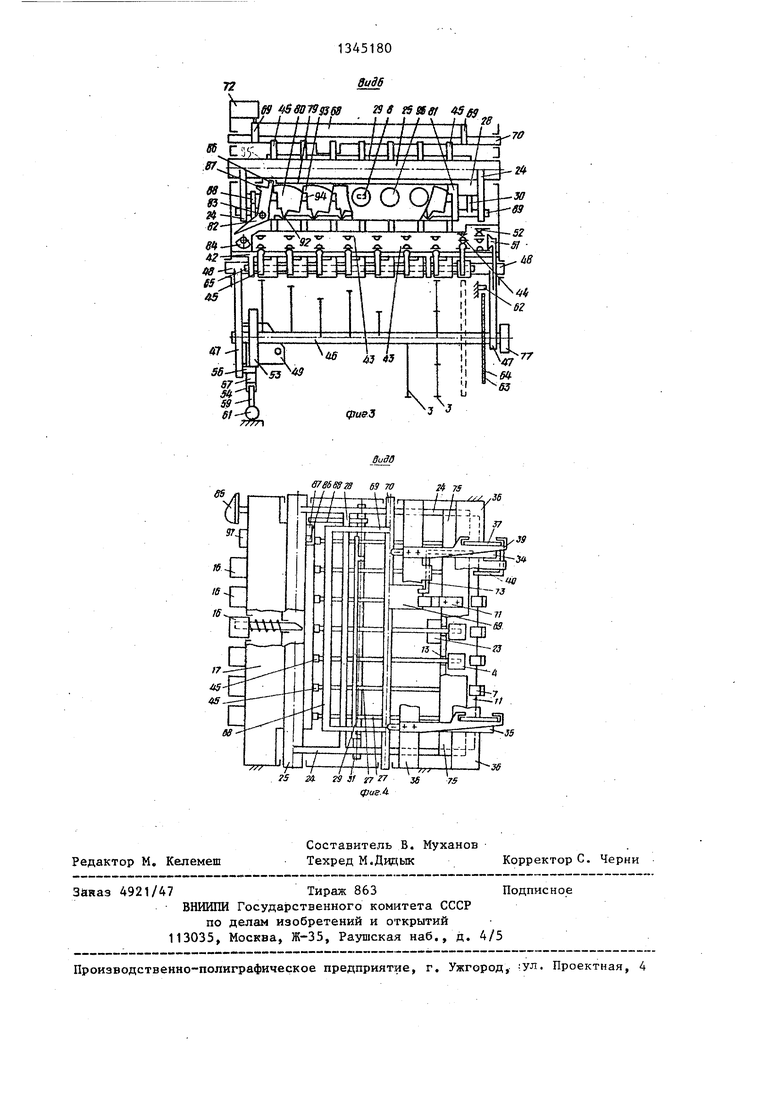
На фиг, 1 изображено устройство, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - вид Б на фиг. 2; на фиг. 4 - вид В на фиг. 2„
Устройство для управления группой исполнительных механизмов содержит кулачковые переключатели 1,2 управления и нагрузки, в которых кинематическая связь между кулачками 3,V и подвижными частями 5 коммутационны элементов 6 выполнена в виде подвиж- ных передаточных звеньев 7, причем в переключателе 1 управления, снабженном средствами 8 ручного управления, держатель 9 кулачков 3 связан с движущим приводом 10, а в переключателе 2 нагрузки носитель 11 кулачков 4 установлен с возможностью .возвратного движения и связан с вклю /включающим приводом 12, узлы управления (не показаны) приводами 10,12. Носитель 11 кулачков 4 выполнен в виде обоймы, в направляющих 13 которой -закреплены кулачки 4 переключа- . теля 2 нагрузки, кинематически связанные с кулачками 3 переключателя 1 управления. Средство 8 ручного управления выполнено в виде группы подпружиненных толкателей, рабочие концы 14 которых сопряжены с передаточными звеньями 7 переключателя 1
управления и на других концах 15 зак- 40 состоит из храпового колеса 53, закреплены клавиши 16, размещенные на лицевой панели 17 обоймы 11.
Подвижные передаточные звенья 7 связаны с коммутационными элементами с помощью крепежных элементов и .тяг 1 9.
Переключатель 2 нагрузки состоит из включающего привода (электромагнита) 12, якорь 20 которого посредством толкателя 21 связан с траверсой 22 обоймы 11, имеющей в средней части выступ 23 для сопряженияс толкателем 21. Траверса 22 жестко закреплена на рычаге 24, установленном на оси 25 в опорах 26 вращения. Травер- са 22 обоймы 11 несет на себя подвижные кулачки 4, снабженные Z-образ - ными проволочными хвостовиками 27, пропущенными через направляющие 13
5
0
5
0
35
и через-отверстия в планке 28, закрепленной на рычаге 24 параллельно оси 25.
Рейка 29 установлена посредством подпружиненных рычагов 30 на другой оси 31, установленной на рычаге 24. Рейка 29 сопряжена с хвостовиками 27, с блок-контактами 32, контролирующими исходное положение кулачков 4, и с другими блок-контактами 33, контролирующими рабочее положение кулачков 4. Блок-контакты 32 и 33 закреплены на рычаге 24.
Кроме коммутационных элементов 6, переключатель 2 нагрузки содержит слаботочные контакты группы 34,35, закрепленные на неподвижном основании 36 и снабженные толкателями 37, которые имеют в верхней, расширенной части штыри 38.
Толкатели 37 зафиксированы в отверстиях неподвижного основания 36 и в направляющих пластинах 39. Контактная группа 34 снабжена защелкой 40, хвостовик 41 которой находится в зоне действия соответствующего кулачка 46 Переключатель 1 управления состоит из закрепленных на неподвижной планке 42 контактных групп 43,44, с которыми посредством других толкателей 45 и кулачков 3 сопряжен кулачковый вал 46, установленный на П-об- разной подвижной вилке 47. Вилка 47 установлена на третьей оси 48, снабжена выступом 49 для связи с электромагнитом 50 и третьим толкателем 51 для другой контактной группы 52.
Кулачковый вал 46 связан с движу- 1ДИМ приводом 10.. Движущий привод 10
репленного на валу 46, движущей плоской пружины 54, выступа 55 и фиксатора 56,закрепленных на вилке 47, собачки 57 в виде плоской пружины, закрепленной на свободном конце движущей пружины 54 и закрепленной на неподвижной оси 58, упора 59,который опирается на неподвижное основание 60 и имеет другую клавишу -61.
Для фиксации кулачкового вала 46 в каждой позиции служит неподвижный штырь-фиксатор 62, с которым взаимодействует диск 63, закрепленный на валу 46. По числу зубьев храпового колеса 53, по краю диска 63 имеются прорези 64, для прохода фиксатора 62.
Толкатели 45 установлены на другой неподвижной оси 65, которая закреплена на кронштейне 66,- и сопряжены с хвостовиками 27 кулачков 4. Один из толкателей 45 взаимодействует только с контактами 44.
Сферический выступ 67 на толкателе 45 - это электрический изолятор. Для фиксации толкателей 45 в нажатом положении служит отсекатель 68, закрепленный на двойном двуплечем рычаге 69, ось 70 которого имеет неподвижные опоры 71 вращения. Одно плечо рычага 69 взаимодействует с третьими блок-контактами 72, а второе - с другой защелкой 73 и пальцем 74, который jg включает электромагнит 50. Вилка 47
поднимает вал 46, которьш посредством кулачков 3 нажимает на толкатели 45, которые одним плечем нажимают на контакты 43, а вторым - на хвостовики 27, вьщвигая в рабочую позицию, т.е. под толкатели 37, кулачки 4. Хвостовики 27 отклоняют рейку 29 вправо, отчего блок-контакт 32 размыкается, но магнит остается включенустановлен на другой планке 75, закт-, репленной на рычаге 24 поверх кулачков 4.
Другая защелка 73 подпружинена по стрелке, имеет неподвижную ось 76 и сопряжена с одним из штырей 38 толкателя 37 контактной группы 34.
20
Переключатель 1 управления содержит другую клавишу 61, рукоятку 77, поджатые пружиной 78 толкатели 8, установленные против соответствующих толкателей 45. Клавиши снабжены механизмом блокировки. Этот механизм состоит из С-образной обоймы 79 с рядом подвижных плоских сухарей 80, ограниченным справа неподвижным упором 81 и слева - трехплечим рычагом 82 с неподвижной осью 83. Нижнее плечо рычага 82 взаимодействует с кулач30
ным, так как в начале хода вилки 47 замкнулся замыкающий контакт 52. Контакт 72 замкнут, так как нажат рычагом 69. Когда кулачки 4 окажутся в рабочей позиции, т.е. в крайне правом положении,рейка 29 нажмет на контакт 33, который включит привод (электромагнит) 12 через узел его управления.
Выступ 23 сообщает нажимной траверсе 22 движение вверх, поворачивая
Выступ 23 сообщает нажимной тра версе 22 движение вверх, поворачив
ком 84 переключателя 85 режимов рабо- 35 рычаг 24 с осью 25. В начале этого
ты, имеюще го два положения: Р - Ручное управление и А - Автоматическое управление. Кулачок 84 показан в положении Р. Среднее плечо рычага 82, не показанное на чертеже полностью, служит грузом для смещения центра тяжести рычага 82 вправо. Верхнее плечо рычага 82 имеет выступ 86, пропущенный через отверстие в обойме 79 и выступ 87 - .для взаимодействия с блокирующим рычагом 88, установленным на оси 89 и поджатым пружиной 90 относительно рычага 30. Под действием пружины 90 рычаг 88 опирается на рычаг 30 посредством выступа 91. Каждый сухарь 80 имеет точечную опору 92, смещенную относительно его центра тяжести влево.Каждый сухарь 80 имеет выступ 93, обеспечивающий зазор 94 между соседними сухарями 86 для ввода в него толкателя 8 через отверстие 95. Напротив зазоров 94 в стенке обоймы 79 имеются отверстия 96 для сопряжения толдвижения палец 74 освобождает рыча 69, но он остается в исходном полож нии, удерживаемый защелкой 73.
Двигаясь вверх, траверса 22 пос редством кулачков 4 нажмет на толка тели 37 и тем самым включит контакт ные группы 34,35. При этом защелка 73 под действием соответствующего штыря 38 поворачивается против часо 45 вой стрелки и освобождает рычаг 69, отчего отсекатель 68 западает между :смещенными толкателями 45 и оставшимися в исходном положении толкате лями 45, а контакт 72 отключает эле 50 тромагнит 50 через узел его управле ния. В то же время защелка 40 западает за край толкателя 37 для удержания группы 34 во включенном положении. Контакт контактной группы 55 35 отключает магнит 12.
После отключения магнита 12 рычаг 24 возвращается в исходное положение, нажав при этом посредством паль
кателей 8 с толкателями 45. Устройство снабжено кнопкой 97 запуска.
Устройство работает следующим образом.
Перед запуском автоматической работы рукояткой 77 устанавливают кулачковый вал 46 в первую позицию, нажимая при этом на клавишу 61 для перевода мешающей вращению собачки 57 с храпового колеса 53 на выступ 55. Затем переключатель 85 устанавливают в положение А.Запускают автоматический цикл кнопкой 97, которая
20
ным, так как в начале хода вилки 47 замкнулся замыкающий контакт 52. Контакт 72 замкнут, так как нажат рычагом 69. Когда кулачки 4 окажутся в рабочей позиции, т.е. в крайне правом положении,рейка 29 нажмет на контакт 33, который включит привод (электромагнит) 12 через узел его управления.
Выступ 23 сообщает нажимной траверсе 22 движение вверх, поворачивая
рычаг 24 с осью 25. В начале этого
движения палец 74 освобождает рычаг 69, но он остается в исходном положении, удерживаемый защелкой 73.
Двигаясь вверх, траверса 22 пос( редством кулачков 4 нажмет на толкатели 37 и тем самым включит контактные группы 34,35. При этом защелка 73 под действием соответствующего штыря 38 поворачивается против часо- 45 вой стрелки и освобождает рычаг 69, отчего отсекатель 68 западает между :смещенными толкателями 45 и оставшимися в исходном положении толкателями 45, а контакт 72 отключает элек 50 тромагнит 50 через узел его управления. В то же время защелка 40 западает за край толкателя 37 для удержания группы 34 во включенном положении. Контакт контактной группы 55 35 отключает магнит 12.
После отключения магнита 12 рычаг 24 возвращается в исходное положение, нажав при этом посредством пальца 74 на рычаг 69, который возвращает, т.е. поднимает, в исходное положение отсекатель 68, Под действием подпружиненного рычага 30 рейка 29 отклоняется влево и с помощью хвостовиков 27 возвращает в исходное положение кулачки 4 и толкатели 45 с контактами 43. Как было сказано, при включении магнита 12 контактом 72 отключился электромагнит 50. В результате этого вилка 47 вернулась в исходлое положение и движущий прИ вод 10 повернул вал 46 во вторую позицию .
Движущий привод 10 работает следующим-образом.
В начале движения вилки 47 вверх при включении магнита 50 в соответствующую прорезь 64 диска 63 попадает неподвижный фиксатор 6.2, затем конец движущей пружины 54 зацепляется за упор 59, отчего собачка 57 перебрасывается через один зуб храпового колеса 53. При возврате вилки 47 в исходное положение движущая пружина 48 освобождается от упора 59 и посредством собачки 57 нажимает на очередной зуб колеса 53 и поворачивает его в следующую позицию в момент освобождения диска 63 от фиксатора 62.
Таким образом, в каждой позиции зала 46 происходит включение определенных коммутационных элементов 6.
При ручном управлении устройство работает почти так же, как и при автоматическом. Разница состоит в том, что толкатели 45 вместо кулачков 3 приводятся в действие клавишами 16, а контакт 35 и отсекатель 6В, зафиксированный защелкой 73, в работе не участвуют.
При нажатии на клавишу 1б толкатель 8 входит в зазор между сухарями 80, отклоняет влево все сухари 80 что слева от этого толкателя 8, а также рычаг 82, ход которого не ограничен кулачком 84, так как переключатель 85 повернут оператором в положение Р.. .
Пройдя между соседними сухарями 8 толкатель 8 проходит через отверстие 96 в стенке обоймы 79 и нажимает на противостоящий толкатель 45, который (как и при автоматической работе) устанавливает соответствующий-кулачо 4 в рабочую позицию и замыкает соответствующий контакт 43.
5
0
5
Если по какой-то причине кулачок 4 не вернется в исходное положение, то рычаг 88 окажется ,на пути выступа
87рычага 82, что исключит отклонение сухарей 80 влево и тем самым, исключит проход толкателя 8 между сухарями 80 к толкателю 45. Рычаг
88будет приподнят пружиной 90, связывающей его с рычагом 30, который отклонен вправо из-за невозврата кулачка 4 в исходное положение.
|
Работа двумя толкателями 8 одновременно исключается, так как сухари 80, отклоненные первым толкателем 8 влево, встают на пути других толкателей 8,что слева от первого нажатого. Толкатели 8, расположенные справа от нажатого, не смогут пройти между сухарями 80, так как они утратили подвижность, ограниченные справа неподвижным упором 81 и слева - нажатым толкателем 8,
Формула изобретения
1. Устройство для управления группой исполнительных механизмов, содержащее кулачковые переключатели управления и нагрузки, в которых кинематическая связь между кулачками и подвижными частями коммутационных элементов выполнена в виде подвижных передаточных звеньев, причем в переключателе управления, снабженном средствами ручного управления, держатель кулачков связан с движущим приводом, а в переключателе,нагрузки носитель кулачков установлен с возможностью возвратного движения и связан с включающим приводом, узлы управления приводами, о т л и ч а ю- щ е е с я тем, что, с целью расширения функциональных возможностей, носитель кулачков выполнен в виде обоймы, в направляющих которой закреплены кулачки переключателя нагрузки, кинематически связанные с кулачками
переключателя управления.
50
2. Устройство по п. 1, отличающееся тем, что средство ручного управления выполнено в виде группы подпружиненны:х толкателей,
55 рабочие концы которы:х сопряжены с пе- редаточньгми звеньями переключателя управления, а на других концаз закреплены клавиши.
0
5
0
45
а
ю
7
8uS6 296 SS6ei S9
cftuffS
28
ЗГ
70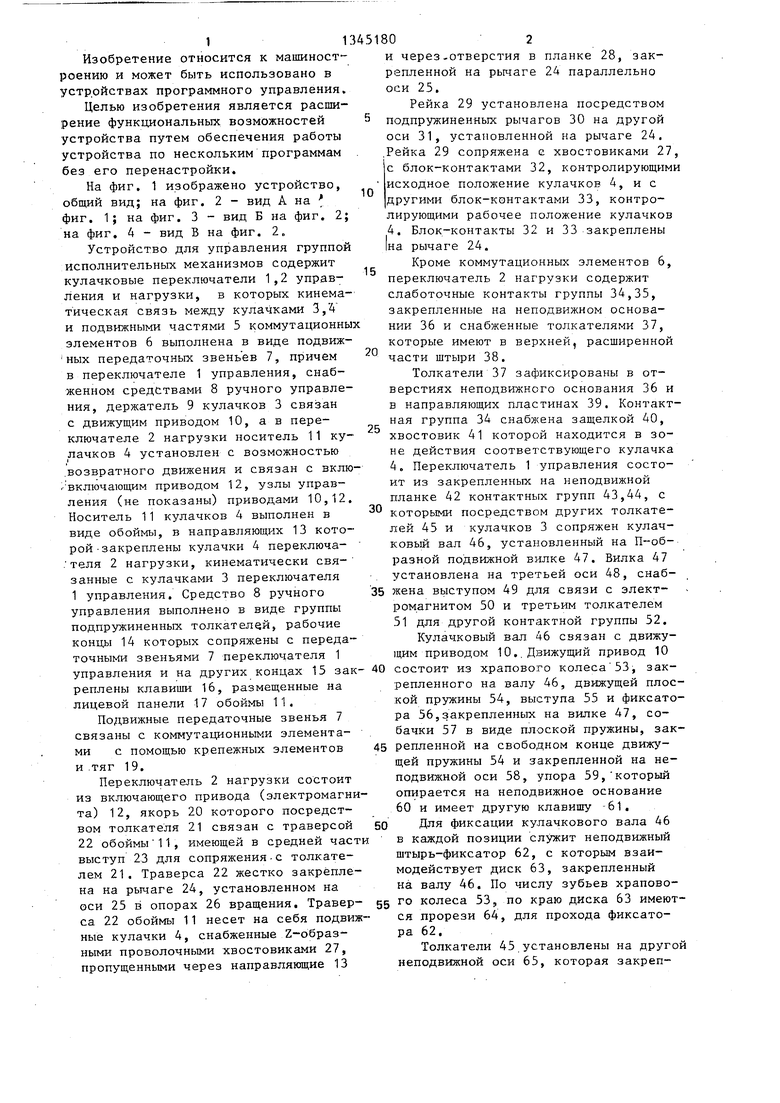
| название | год | авторы | номер документа |
|---|---|---|---|
| Командоаппарат | 1984 |
|
SU1399833A1 |
| Командоаппарат | 1984 |
|
SU1399832A1 |
| Устройство для циклового программного управления | 1987 |
|
SU1603343A1 |
| Коммутатор электрического тока | 1972 |
|
SU444260A1 |
| Устройство коммутации электрических цепей | 1972 |
|
SU481949A1 |
| Ротационно-обжимное устройство | 1977 |
|
SU742024A1 |
| ФИКСАТОР ПОДВИЖНОГО ЗВЕНА МЕХАНИЗМА | 1992 |
|
RU2041519C1 |
| Автомат для обработки пуговиц | 1983 |
|
SU1123869A1 |
| Пишущая машинка | 1983 |
|
SU1164067A1 |
| Швейный полуавтомат для изготовления прямых петель | 1968 |
|
SU649765A1 |
Изобретение относится к области машиностроения и может быть использовано в устройствах программного управления. Цель изобретения - расширение функциональных возможностей. Устройство для управления группой исполнительных механизмов содержит кулачковые переключатели управления и нагрузки с кулачками, коммутационные элементы, передаточные звенья, средства ручного управления, держатель кулачков, движущий привод,носитель кулачков, включающий привод, узлы управления приводами. Расширение функциональных возможностей обеспечивается тем, что носитель кулачков выполнен в виде обоймы, в направляющих которой закреплены кулачки. 1 з.п. ф-лы. 4 ил. оо 4 СП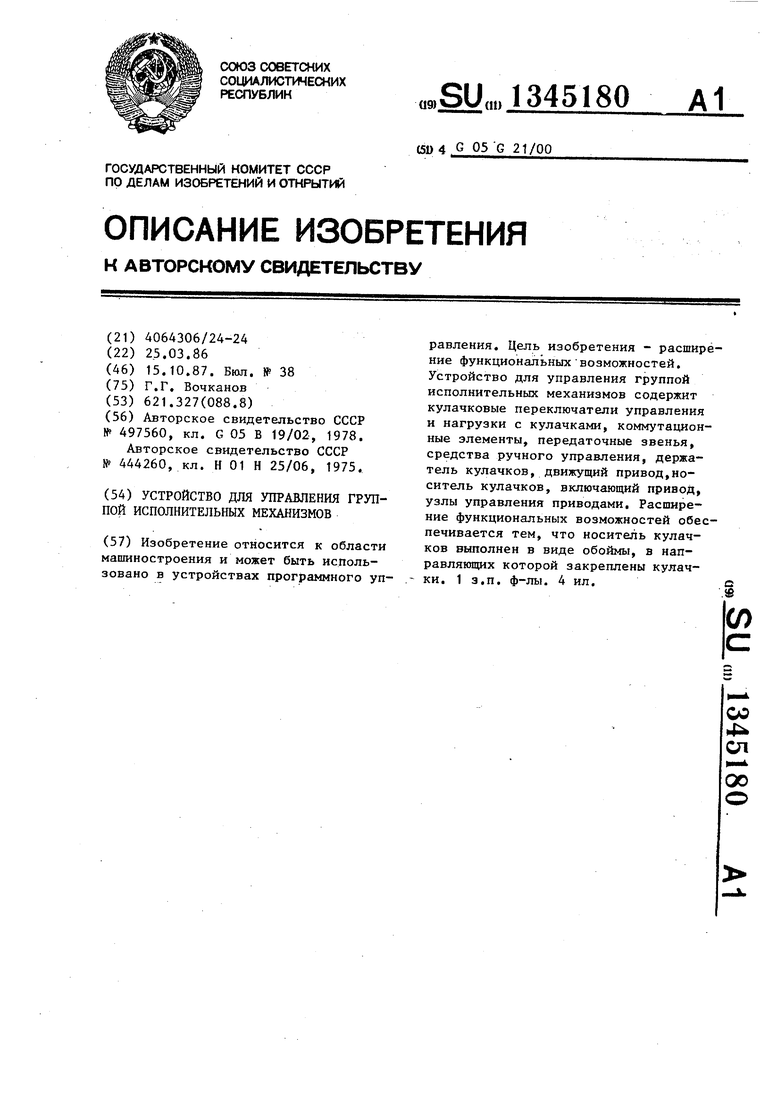
вгвбвзгз 69 70 4-424 75
iiiXyJff
SB
Редактор M. Келемеш
Составитель В. Муханов
Техред М.Дидык Корректоре. Черни
заказ 4921/47Тираж 863Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, -УЛ. Проектная, 4
| Устройство для управления исполнительными механизмами | 1971 |
|
SU497560A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Коммутатор электрического тока | 1972 |
|
SU444260A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
