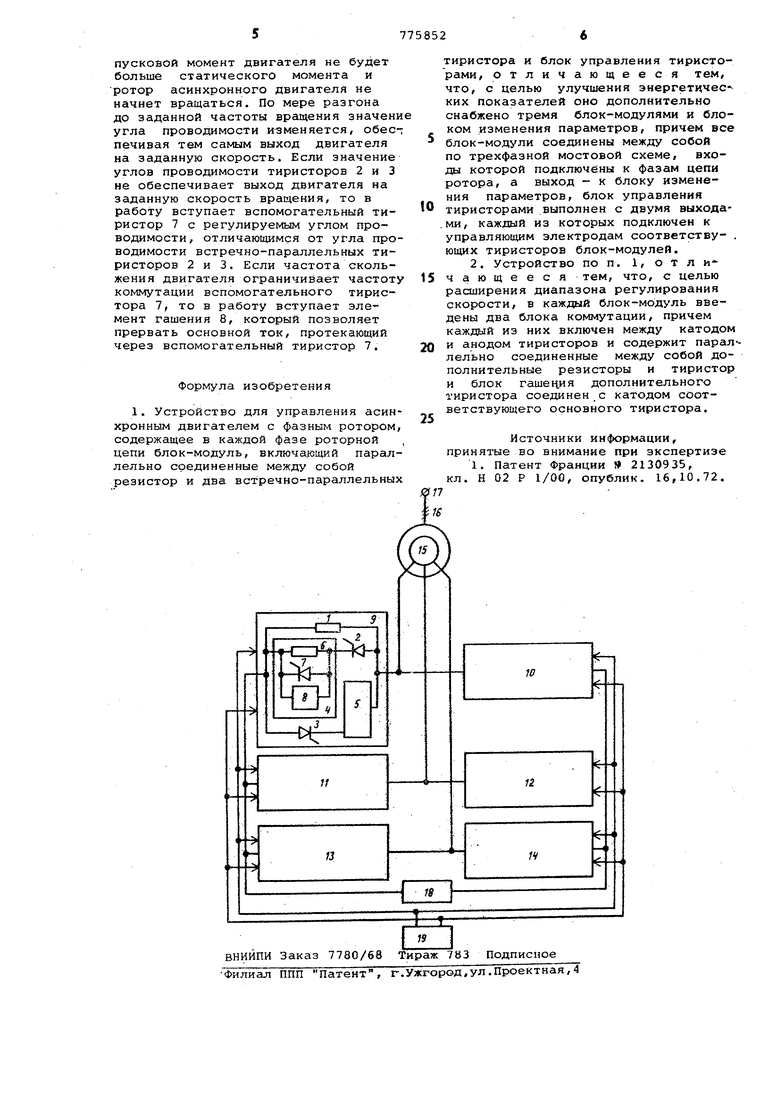
Изобретение относится к электротехнике, а именно к электроприводам и может быть использойано для упра ления пуском и регулирования скорос ти асинхронных двигателей с фазным ротором, применяемых в электроприводе механизмов волочильных станов, конвейерных или подъемных установок на предприятиях металлургической, горнообогатительной, цементной или любой другой промышленности. Известно устройство для управления асинхронным двигателем с фазным ротором 1, в котором последо вательно с каждой обмоткой роторной цепи включены добавочные сопро тивления и встречно включенные тири торы. Это устройство является наиболее близким к изобретению по технической сущности и достигаемому результату. Устройство осуществляет импульсное управление с коммутацией в цепи переменного тока. Тирис торы, включенные в роторную цепь последовательно сопротивлением рото ра, периодически изменяют параметры схемы роторной цепи, что влечет за собой периодические изменения электромагнитного момента при задан ной скорости. Тиристоры работают в режимах естественной коммутации, т.е. коммутация фазы возможна с частотой роторного тока. Работа тиристоров роторной цепи искажает форму роторных токов, что вызывает дополнительные моменты и потери в двигателе и питакнцей сети, изменяя этим энергетику электромеханического преобразователя, а в случае мощных электроприводов - энергетику электроприемн иков, расположенных вблизи преобразователей. Обладая низкими энергетическими показателями, известное устройство применимо только для некоторого ряда механизмов. Искажение формы тока вызывает пульсации момента. Целью изобретения является улучшение энергетических показателей электродвигателя и расширение диапазона регулирования скорости. Поставленная цель достигается тем, что устройство для управления асинхронным двигателем дополнительно снабжено тремя блок-модулями и блоком изменения параметров, причем все блок-модули соединены между собой по трехфазной мостовой схеме, входы которой подключены к фазам цепи ротора, а выход - к блоку изменения пара.метров, блок управления тиристорами выполнен с двумя выходами, кажддай из которых подключен к управляюгдим электродам соответствующих тиристоров блок-модулей. В блок-модули . введены два блока коммутации-, причем каждый из них включен между катодом и анодом тиристоров и содержит парал лельно соединенные между собой дополнительные резистор, тиристор и блок гашения дополнительного тиристо ра, а анод дополнительного тиристора соединен с катодом соответствующего сзсновного тиристора. Сущность изобретения поясняется Чертежом, на котором изображена блок схема устройства. Резистор 1 подключен параллельно астречно-параллельно соединенным тиристорам 2,3 и блокам комглутации 4,5 В блоки коммутации 4,5 входят параллельно соединенные между собой резистор б, вспомогательный тиристор 7 и узел гашения 8. Входятдие, в блок-модули 9-14 тиристоры 2,3 и бло ки коммутации 4,5 включены между собой встречно-параллельно. Блок-модули 9-14, образованные. резистором 1, тиристорами 2,3 и блоками ком 1утации 4,5 включены в ка «-дую фазу ротора 15 асинхронного : электродвигателя. Статор 16 KOTopcio подключен к источнику переменного тока 17, Соединенные между собой блок-моду ли 9-14 образуют трехфазный мостовой преобразователь (схему Ларионовз.) , В-цепь постоянного тока мостового преобразователя включен блок изменения параметров 18. Блок-модули 9 11,13 образуют анодную, а блок-мо дули 10,12,14 -катодную rpynnF is трехфазного мостового преобразователя« Выходы блока управления 19 подключен к аноднойи катодной группам преобразователя. Включенные в цепь ротора 15 добавочные резисторы 1 используются для ограничения пусковых токов и изменения вида механической характеристики асинхронного двигателя. Тиристоры 2 и 3 предназначены для изменения э«вивалентной величины добавочных резисторов 1, в результате чего изменяются параметры цепи асин кронного двигателя. При коммутациях добавочных резисторов тиристорами 2,3 возникают большие токи в роторн цепи двигателя, поэтому для ограни чения этих токов используются резис торы 6, Исходя из заданного диапа зова регулирования частоты вращения асинхронного двигателя и режима работы механизма, параметры резисто 6 изменяются от минимального своего значения ло максимольного.зс Изменение эквивалентной величины резистора 6 осуществляется вспомогательным тиристором. 7. Так как вспомогательный тиристор 7 представляет собой вентиль с неполной управпяемостью,т.е. он не может закрыться при помощи управляющего сигнала, то для полного управления вспомогательным тиристором 7 используется искусственная коммутация, которая осуществляется узлом гашения 8. Искуственная коммутация может осуществляться при помощи специальных коммутирующих конденсаторов или других элементов,которые запасают энергию, необходимую для прерывания тока через вспомогательный тиристор 7. Включение добавочных резисторов 1, резисторов 6, вспомогательных тиристоров 7 и узлов гашения 8 позволяет расширить область применения данного устройства, так как значительно .расширяется область регулирования электропривода. Блок изменения параметров 18 содержит пассивные элементы RjL,.C,- а также устройство для измеьения их велич)-гН1а по любому закону. 11ассивЕ{ыё элементы R,LfC блока изменения параметров являются нагрузкой для трехфазного мостового преобразователя. Управление тиристорами 2,3,7 и узлом гашения 8 осуществляет блок .19. Этот блок имеет два выхода, при этом управление анодными и катодными группами трехфазного мостового преобразоБаэеля осуществляется с раз;.гичными углами проводимости. Угол проводимости: встречно-паралл-ельных соединений тиристоров и коммутирующргх элементов .изменяется в зависимости от нагрузки на валу двигателя, частоты вращения и.т.д. Управление тиристорами с различными углами проводимости позволяет значительно улучшить форму токов в роторной цепи асинхронного двигателя и тем самым значительно улучшить энергетические показатели электропривода. При подаче питающего напряжения на статор 16 асинхронного двигателя от источника переменного тока 17 в обмотке ротора 15 индуктируется ток. Встречно-параллельные и вспомогательные тиристоры 2,3 и 7 в первый момент времени закрыты, а включенные в цепь ротора добавочные резисторы 1 создают начальный пусковой момент асинхронного двигателя. При этом величина добавочного резистора выбрана в предлагаемом устройстве максимальной ,и , следовательно, пуско.зой момент асинхронного двигателя будет минимальным. Если статическиймомент на валу асинхронного двигателя больше пускового, то блок управления 19 вы.дает сигнал управления на открывание встречно-параллельных тиристоров 2 и 3 с начальным значением угла проводимости, величина которого автоматически будет изменяться до тех пор, пока
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод переменного тока | 1985 |
|
SU1319215A1 |
| Устройство для управления асинхронным электродвигателем с фазным ротором | 1978 |
|
SU698106A1 |
| Электропривод переменного тока | 1979 |
|
SU847480A1 |
| Асинхронный вентильный каскад | 1983 |
|
SU1115196A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ ЖИВУЧЕСТИ ДВИГАТЕЛЯ ДВОЙНОГО ПИТАНИЯ | 2013 |
|
RU2525294C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТРЕХФАЗНЫМ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ФАЗНЫМ РОТОРОМ | 1991 |
|
RU2056699C1 |
| АВТОНОМНЫЙ ТЯГОВЫЙ ЭЛЕКТРОПРИВОД | 1995 |
|
RU2093378C1 |
| Электропривод с устройством для возбуждения синхронной машины | 1983 |
|
SU1262682A1 |
| АСИНХРОННЫЙ ВЕНТИЛЬНЫЙ КАСКАД | 2007 |
|
RU2342767C1 |
| Электропривод с устройством для возбуждения синхронной машины | 1982 |
|
SU1119157A1 |
