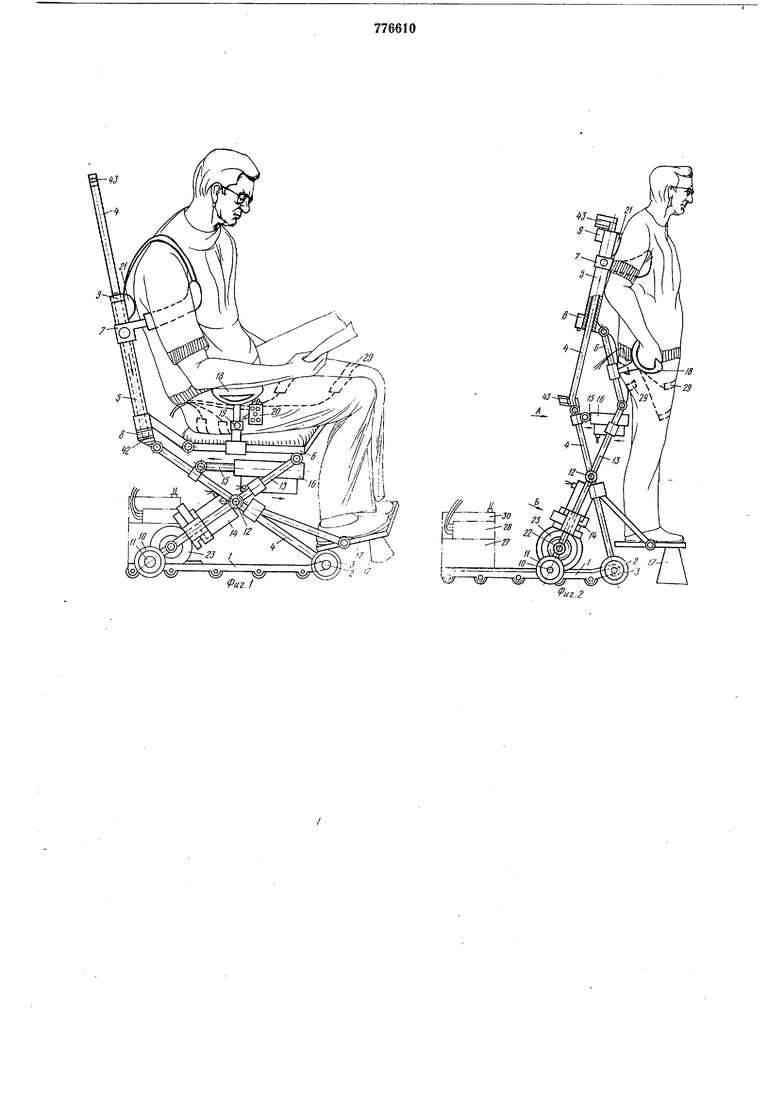
колесной пары 3, установленной на концах рычагов 4, несущих телескопическз ю раму 5, шарнирно соединенную с задним краем сидения 6. На раме 5 закреплены подмышечники 7 и концевые выключатели 8 и 9.
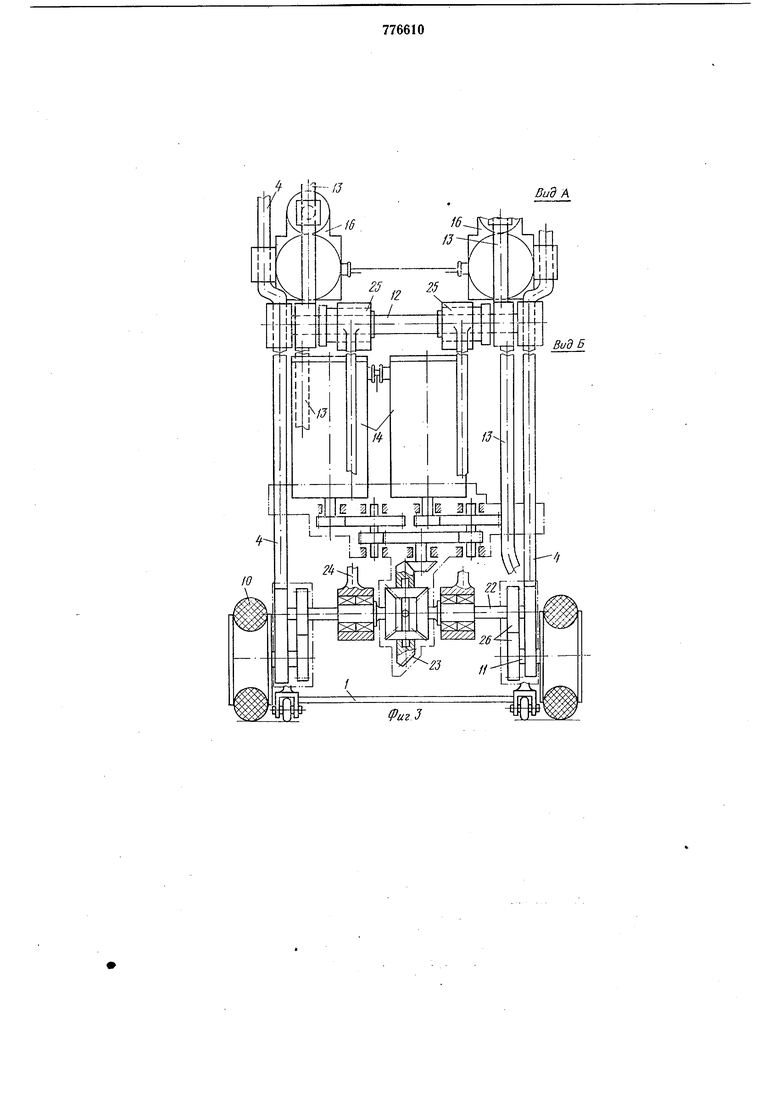
Задняя колесная пара 10 установлена на полуосях 11, вмонтированных в скрещенных с рычагами 4 посредством основной оси 12 рычагах 13, на нижних концах которых смонтированы спаренные ходовые приводы 14. Верхние концы рычагов 13 шарнирно соединены с передним краем сидения 6.
Толкатель 15 выполнен в виде ходового винта выходной винтовой пары привода 16 подъема и опускания, который щарнирно закреплен на рычагах 13, толкатель 15 шарнирно прикреплен к верхним концам скрещенных пар рычагов 4 и 13, на нижних концах рычагов 4 шарнирно закреплены автономные ножные упоры 17 в виде площадок, причем концы плошадок расположены над передними колесами 3.
На боковых сторонах сидения 6 закреплены подлокотники 18 посредством телескопической самоустанавливающейся скобы 19, в подлокотниках вмонтирован щиток 20 с его оперативными кнопочными контактами электросхемы управления.
Заспинный упор 21 смонтирован как одно целое с телескопической рамой 5.
Полуоси 22 выходной ступени с дифференциалом 23 спаренных ходовых приводов 14 связаны с основной осью 12 рычагов 4 и 13 посредством стяжек 24 на опорах 25 качения, а с полуосями 11 посредством зубчатой пары 26.
На поворотном на 270° основании 1 установлены съемные при транспортировке электростимулятор мышц в виде звукового генератора 27 с двухканальным формирователем 28 импульсов и выходными накладными электродами 29, скоммутированньши через спаренные с последним реле времени, и аккумулятор 30.
Принципиальная контактная электросхема кнопочного управления включениями приводов 16 лодъема и опускания сидения 6, синхронизированных с включениями формирователя 28. импульсов, а также для включения ходовых приводов 14 содержит восемь оперативных контактов в виде переключателя 31, перекоммутирующего цепь от выпрямителя 32, питаемого от вторичной обмотки 33 трансформатора 34, от сети на питание от аккумулятора 30; кнопки 35 отключения ходовых приводов 14; кнопки 36 включения звукового генератора 27 с выходным формирователем 28 импульсов, также питаемых от соответствующих автономных вторичных обмоток 33 трансформатора; перекидного переключателя 37 установки направления движения; двух переключателей 38, один из которых выполнен на два положения: с одновременным подключением электроприводов 16 подъема и звукового генератора 27 с формирователем 28 импульсов, а другой переключатель 39 выполнен с одним замыкающим контактом включения ходовых электроприводов 14 и одним размыкающим блокирующим контактом отключения электроприводов 16 подъема и опускания сидения 6; кнопок 40 и 41, соответственно, для подключения и отключения системы управления чередующимися актами вставания и приседания в автоматизированном режиме.
Кроме перечисленных восьми оперативных контактов, электросхема дополнительно содержит три сигнальных контакта в виде упомянутых концевых выключателей 8 и 9с нормально замкнутыми контактами и концевого выключателя 42 с нормально разомкнутым контактом, расположенного у сидения 6 как и концевой выключатель 8, и служащего для блокировки возможности включения ходовых приводов 14, когда сидение 6 еще полностью не возвратилось в горизонтальное положение. Концевой выключатель 9 располож ен наверху и сбоку телескопической рамы 5 для взаимодействия с упорами 43, расположенными на концах рычагов 4.
Система управления чередующимися актами вставаний и приседаний в автоматическом режиме состоит из параллельно подключенных в цепи питания приводов 16 подъема и опускания сидения 6 и закоммутированных через ограничительный резистор 44 аккумулятора 30 или выпрямителя 32, двух электромагнитных реле 45 и 46, обмотки которых подключены соответственно к коццевым выключателям 8 и 9, контакты которых нормально замкнуты и совместные включения которых как и реле 45 и 46 исключены.
Креслом-кол-яской пользуются следующим образом.
В удобном для пользующегося кресломколяской положении в пространстве фиксируют ножные 17 и заспинный 21 упоры, подмышечники 7 и подлокотники 18.
В слегка увлажненных чехлах накладывают через специальные карманы в одежде плоские электроды 29 поверх четырехглавых мыщц бедер и больших ягодичных мыщц для стимуляции последних при подъемах тренируемого в преодолевающем режиме, а при приседании - в уступающем режиме.
При преобладающей сгибательной контрактуре у пользующегося креслом электроды 29 накладывают также на заднюю и внутреннюю группы мышц бедер, в которые входят все приводящие мышцы.
Для удержания электродов 29 применяют прорезиненные манжетки, а их электропровода для удобства подключения к двухкапальному фюрмирователю 28 импульсов
выводят наружу у поясничной области пациента.
Электроды 29 ставят после контрольной отладки дифференцированного для актов вставания и приседаний режима по выходному току на формирователе 28 импульсов, . после чего пациента ставят на ножные упоры 17 в положении, ноказанном на фиг. 2, устанавливают подмыгаечникн 7, которые фиксируют индивидуально, пациент удерживается при этом за самоустанавливающиеся скобы 19 подлокотников 18, после чего включают электропривод 16 на время, пока толкатель 15 не переместится в свое крайнее положение (фиг. 1).
Опускание сидения 6 до горизонтального положения синхронизируют с пропорциональным опусканием телескопической рамы 5 путем соответствующих отладок щарнирных звеньев, связанных как с сидением 6, так и с концами рычагов 4, при фиксации подмыщечников 7, которые могут быть выполнены подпружиненными.
Включение кресла-коляски в автоматическом режиме чередования подъемов и опускания сидения 6 возможно только после того, как последнее приняло горизонтальное положение.
Все упомянутые восемь оперативных и три сигнальных контакта электрических цепей сгруппированы на щитке 20 пятикнопочного управления: одна кнопка воздействует на замыкание группы контактов 36, 38 и 40 и на размыкание контактов 35, что обеснечивает проведение механотерапевтических сеансов с чередующимися актами вставания и приседания в автоматическом динамическом режиме со стимуляцией участвующих в акте мыщц; другая кнопка воздействует на замыкание группы контактов 38 и 36 и на размыкание контактов 35 и 40, что обеспечивает при дополнительном воздействии на третью кнопку переключателя 37, зстановку направления движения и по желанию пациента позволяет осуществить акты вставания и приседания; четвертая кнопка воздействует на размыкание контактов 31 и 36 для перекоммутации переключателя 31 с выпрямителя 32 на клеммы аккумулятора 30 и на включение переключателя 39, что нозволяет нациенту передвигаться вне дома на лоне природы; пятая, последняя кнопка предназначена для передвижения в помещении с возможностью питания спаренных приводов 14 от сети, она воздействует на те же контакты, что и четвертая, также оперируя переключателем 37 установки направления движения, и отличается лищь изменением положения пепеключателя 31.
Предложенное кресло-коляска не смотря на то, что оно является моторизованным, его транспортируют в складном ноложении, а благодаря тому, что длина толкателя 15
при срабатывании привода 16 на подъем сокращается до минимума, обладает и необходимой жесткостью при облегченном весе.
Предлагаемое кресло-коляска позволяет вырабатывать динамический стереотип в в процессе активного освоения актов вставания и приседания, сонровождающихся действием адекватной стимуляции мыщц коленного и тазобедренного суставов импульсами в реальном масщтабе времени, в условиях пространственной подвижности тренируемого, что способствует постепенному восстановлению утраченных функций порал енных мыщц при паранарезе нижних конечностей.
Формула изобретения
1.Кресло-коляска, содержащее основание с колесами, сидение, подлокотники, заспинный и ножной упоры и рычажный подъемный механизм с реверсивным приводом подъема и толкателем, отличающееся тем, что, с целью восстановления утраченных функций пораженных мыщц выработки динамических стереотипов актов вставания и усаживания действием стимулирующих имнульсов на мыщцы коленного и тазобедренного суставов пациента в условиях его нространственной подвижности, подъемный механизм выполнен в виде четырехзвенника и имеет два щарнирно скрепленных рычага, первый из которых щарнирно установлен на основании и несет телескопическую раму, щарнирно соединенную с сидением, на которой закреплены подмыщечники и концевые выключатели, на втором рычаге с одной стороны щарнирно закреплен привод подъема с толкателем, щарнирно соединенным с первым рычагом, а с другой стороны закреплен ходовой привод; ножной упор выполнен в виде двуплечего звена, щарнирно закрепленного на первом рычаге четырехзвенника, причем одно из плеч снабжено упором, а другое расположено над передним колесом; на основании установлены электростимулятор мыщц с двухкапальным формирователем импульсов с выходными накладными электродами и реле времени, а в подлокотник, который закреплен на сидении посредством телескопической самоустанавливающейся скобы, вмонтирован щиток управления.
2.Кресло-коляска по п. 1, отличающееся тем, что толкатель привода подъема выполнен в виде ходового винтового механизма.
Источники информации, принятые во внимание при экспертизе
1. Патент Швейцарии № 593056, кл. А 61G 5/00, опублик. 1977.
Vi
Фиг.1
Вид А
т
ffi
Вид Б
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНВАЛИДНАЯ КОЛЯСКА С ЭЛЕКТРОМЕХАНИЧЕСКИМ ПРИВОДОМ | 1991 |
|
RU2085166C1 |
| Многофункциональное кресло-коляска | 2015 |
|
RU2651228C2 |
| КРЕСЛО-КОЛЯСКА ДЛЯ ИНВАЛИДОВ (ВАРИАНТЫ) | 2011 |
|
RU2452451C1 |
| УЗЕЛ СИДЕНЬЯ | 2011 |
|
RU2547690C2 |
| Кресло-коляска | 1989 |
|
SU1787436A1 |
| Кресло-тренажер | 1983 |
|
SU1139434A1 |
| Кресло-коляска | 1984 |
|
SU1297854A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ТРАНСПОРТИРОВКИ ГРУЗОВ И ЛЮДЕЙ ПО ЛЕСТНИЦАМ И ПЛОСКОЙ ПОВЕРХНОСТИ | 2012 |
|
RU2538408C1 |
| КРЕСЛО-КОЛЯСКА ДЛЯ ИНВАЛИДОВ И ПАНДУС ДЛЯ ПЕРЕМЕЩЕНИЯ КОЛЯСКИ ДЛЯ ИНВАЛИДОВ ПО ЛЕСТНИЧНЫМ МАРШАМ (ВАРИАНТЫ) | 2011 |
|
RU2478362C2 |
| Стоматологическое переносное кресло | 1987 |
|
SU1498493A1 |

10
W 22 22
23
