Область техники, к которой относится изобретение
Изобретение относится к области транспортных средств для транспортировки грузов или людей по ровной поверхности, а также для подъема и спуска по ступенькам лестниц эскалаторов и других транспортных средств. Преимущественно изобретение может использоваться для автономной транспортировки тяжелого груза одним обслуживающим лицом без физических мускульных усилий или автономной транспортировки кресла-коляски с человеком, не способным ходить, с самообслуживанием без обслуживающего лица.
Уровень техники
Известна ручная тележка для перемещения груза по лестницам и ровной поверхности. (Смотри патент РФ №2095266 C1, приоритет 12.11.1993 г., на изобретение «Ручная тележка для перемещения по лестницам», автор Тарануха И.И.) Тележка содержит раму с ручкой, ходовые и опорные колеса и роликовые полозья с рядом опорных роликов, опирающихся на кромки лестничных ступенек при подъеме или спуске по лестнице. При движении по ровной поверхности роликовые полозья находятся в транспортном положении.
Тележка позволяет снизить физические усилия при подъеме грузов по лестнице для равномерной скорости спуска.
Недостатком аналога является необходимость использования больших физических усилий обслуживающего лица для ручной тяги при подъеме и спуске этой тележки по лестнице и по ровной поверхности. Поэтому такие тележки невозможно использовать для автономной транспортировки кресел-колясок и физическими усилиями самих инвалидов, и с помощью электрических приводов.
Причинами этих недостатков аналога являются: слабое сцепление роликов на полозьях тележки с кромкой ступеней лестниц, что приводит к аварийному скатыванию тележки с лестницы без удержания обслуживающим лицом.
Прототипом предлагаемого транспортного средства, наиболее близким по технической сущности и функциональному назначению, является приспособление для подъема по лестницам грузов и/или кресла-коляски с человеком. Смотри: патент РФ №2201367 C2 от 17.11.1998 г. на изобретение «Приспособление для подъема по лестницам, приводимое в движение мотором», автор Карстен Бернт. Приспособление приводится в действие мотором и предназначено для транспортирования утвари и грузов, разъемно закрепленных на этом приспособлении для подъема, в частности, кресел-колясок с находящимися в них людьми, не способными ходить. Приспособление содержит: прочную раму, снабженную источником энергии, источником приводной силы, системой управления приводом, щупами-датчиками и датчиками, и механику подъема по лестницам. Снизу на раме слева и справа смонтированы по одному ходовому колесу, которыми приспособление опирается на верхнюю и нижнюю ступеньки лестницы. Для обеспечения процесса опоры, направленного в значительной мере вертикально к пешеходной поверхности лестничных ступенек, на раме смонтировано опорное устройство, на свободном конце которого в качестве подъемной механики установлена поворотная крестовина с двумя или тремя опорными колесами, приводимая в движение мотором, а привод синхронизирован с подъемной механикой для подъема по лестницам с помощью опорных колес этой крестовины при повороте этой крестовины. При транспортировании по ровной поверхности опорное устройство откидывается вверх под перевозимый груз, в частности под кресло-коляску. Для максимальной надежности и устойчивости при подъеме по лестнице приспособления с грузом или кресла-коляски с человеком предложена подъемная механика в идее опорной лапы, совершающей вертикальное движение с опорой на поверхности ступенек лестницы ближе к центру горизонтальной поверхности этих ступенек. На приспособлении установлены щупы-датчики в виде контактных планок, которые срабатывают только при нахождении приспособления вблизи следующей кромки лестницы и включают в работу источник приводной силы, осуществляющего очередной ход вверх по лестнице.
Техническим результатом прототипа является создание легкого по весу, малогабаритного приспособления, закрепляемого с возможностью съема на любых транспортируемых грузах, в частности на креслах-колясках, с повышенной степенью безопасности.
Существенным недостатком прототипа является: возможность безопасного подъема и спуска транспортируемых грузов и кресел-колясок по лестнице на приспособлении, поддерживаемом и управляемым вручную обслуживающим лицом (для удержания приспособления от аварийного опрокидывания на лестнице). Это исключает возможность дистанционной или автономной транспортировки и управления кресла-коляски самим человеком, сидящим в этом кресле-коляске. Транспортировка по лестницам кресла-коляски обеспечивается только с дискомфортом из-за существенного наклона кресла-коляски с человеком.
Указанные недостатки связаны с расположением вертикальной линии общего центра тяжести близко к оси пары опорных ходовых колес, что создает низкую устойчивость транспортного средства на лестнице и приводит к неконтролируемому аварийному съезду и падению с лестницы, а также низкая устойчивость конструкции приспособления с грузом или с креслом-коляской на лестнице.
Раскрытие изобретения
Задачей заявленного изобретения является создание устойчивого и безопасного транспортного средства для комфортной, устойчивой и безопасной автономной транспортировки грузов или человека в кресле-коляске по лестницам без сопровождающего лица в процессе подъема и спуска по ступенькам лестниц, эскалаторов и других транспортных средств и в процессе движении по горизонтальной и наклонной ровной поверхности.
Целью изобретения согласно п.1 формулы изобретения является упрощение конструкции грузового транспортного средства или кресла-коляски за счет установки на транспортном средстве универсального колесного шасси для движения по ровной поверхности, а также для подъема и спуска по лестницам только на ходовых опорных колесах. Дополнительной целью является обеспечение безаварийной транспортировки грузов или человека в кресле-коляске за счет увеличения количества опорных ходовых колес и их регулируемой установки в оптимальных точках опоры на ступеньках в процессе подъема или спуска этого транспортного средства по ступенькам лестниц, эскалаторов или других транспортных средств. Дополнительной целью для повышения устойчивости на лестницах является конструктивное обеспечение регулировки оптимального расположения общего центра тяжести транспортного средства с грузом или человеком относительно центра площади колесной опоры на этих ступеньках.
Дополнительным техническим эффектом согласно п.2 формулы изобретения является повышение устойчивости транспортного средства за счет оптимального автоматического регулирования длины плеч крестовин для регулирования оптимальных расстояний между ходовыми опорными колесами и осями своих крестовин с помощью измерения дистанций от каждого колеса, опирающегося на ступеньку, до вертикальной стенки ближней ступеньки.
Дополнительным техническим эффектом согласно п.3 формулы изобретения является повышение устойчивости транспортного средства на лестницах и эскалаторах за счет автоблокировки от произвольного вращения в обратном направлении ходовых опорных колес.
Дополнительным техническим эффектом согласно п.4 формулы изобретения является обеспечение постоянного комфортного вертикального расположения человека в процессе подъема и спуске по ступенькам лестниц, эскалаторов и другого транспорта и при движении по плоской поверхности за счет пониженного расположения центра тяжести кресла с человеком относительно точек боковых опор этого кресла на раму с возможностью вертикального самостоятельного вертикального выравнивания кресла по типу маятника.
Дополнительным техническим эффектом согласно п.5 формулы изобретения является повышение устойчивости кресла-коляски на лестнице или эскалаторе за счет продольного смещения кресла с человеком в зону оптимальной точки в площади опоры на ходовых колесах. На грузовом транспорте повышение устойчивости транспорта достигается за счет конструктивного обеспечения горизонтального выравнивание грузонесущей конструкции и горизонтального расположения на ней груза при подъеме и спуске по лестницам или эскалаторам.
Дополнительным техническим эффектом согласно п.6 формулы изобретения является возможность механизированного подъема на это транспортное средство тяжелого и/или крупногабаритного груза с уровня пола или земли или с другого доступного уровня и возможности механизированной разгрузки этого груза или переноса человека на другую опору.
Дополнительным техническим эффектом согласно п.7 формулы изобретения является повышение маневренности транспортного средства на малой площади.
Дополнительным техническим эффектом согласно п.8 формулы изобретения является возможность повышения устойчивости транспортного средства при подъеме и спуске по ступенькам лестниц, эскалаторов и другого транспорта за счет разворота ходовых опорных колес параллельно длине лестничных ступенек с блокировкой вращения этих колес.
Дополнительным техническим эффектом согласно п.9 является комфортность управления транспортировкой грузов или человека в кресле-коляске с помощью возимого электрического аккумулятора, электродвигателей и электроприводов и программным пультом управления этим транспортным средством.
Поставленная цель достигается тем, что предложено транспортное средство для транспортировки по лестницам и плоской поверхности грузов на грузовом транспортном средстве или человека с ограниченными возможностями в кресле на кресле-коляске. Транспортное средство содержит прочную раму. На раме грузового транспортного закреплена грузонесущая конструкция для закрепления груза. На раме кресла-коляски закреплено кресло для сидения человека. Снизу на раме этих транспортных средств закреплено колесное шасси с ходовыми опорными колесами с возможностью вращения колес в любую сторону и подъемная механика для подъема транспортного средства по ступенькам лестниц, эскалаторов и других транспортных средств. Подъемная механика содержит механические или электрические приводы с системой управления этими приводами для передвижения транспортного средства и регулирования подъемной механики и колесного шасси. Снизу на этой раме закреплена горизонтальная поворотная ось, на этой оси неподвижно закреплена трехплечая крестовина с тремя одинаковыми плечами, неподвижно закрепленными на цапфе своей крестовины и расположенными в вертикальной плоскости с радиальными углами 120 градусов между этими плечами. На конце каждого плеча перпендикулярно его продольной оси закреплена горизонтальная поворотная ось. На этой оси неподвижно закреплено ходовое опорное колесо с возможностью вращения этого колеса своей осью в любую сторону для качения транспортного средства на этих ходовых колесах. Привод механически связан с осью крестовины для вращения крестовины в процессе подъема или спуска транспортного средства по ступенькам лестниц за счет опоры транспортного средства ходовыми и опорными колесами на ступеньках лестниц и эскалаторов.
Существенными признаками, отличающими заявленное транспортное средство от прототипа, являются: колесное шасси выполнено из четырех трехплечих крестовин с ходовыми опорными колесами на каждом плече каждой крестовины. На раме спереди слева и справа и сзади слева и справа закреплены по одной продольно-горизонтальной направляющей. На каждой направляющей закреплена подвижно в горизонтально-продольном направлении колесная опора, выполненная в форме уголка, горизонтальная часть которой расположена в этой направляющей. На нижнем конце вертикальной части колесной опоры закреплена горизонтальная поворотная ось, на которой неподвижно закреплена указанная выше трехплечая крестовина. На каждой направляющей установлен ручной механический или гидравлический или электрический привод для продольно-горизонтальной передвижки колесной стойки вдоль рамы (для регулирования длины продольной левой и правой базы между осями пар крестовин слева и справа), что обеспечивает устойчивость постановкой всех ходовых колес в точки безаварийной опоры этих колес на ступеньках лестниц, эскалаторов и других транспортных средств, а также для переноса центра тяжести транспортного средства (с грузом или человеком в кресле) по направлению от центра площади опоры на ходовые колеса вверх по лестнице. Ось каждой крестовины связана механической передачей с механическим или электрическим приводом для автономного или синхронного вращения этой осью своей крестовины. На раме установлена рулевая система для автономного поворота (обслуживающим лицом или человеком, сидящем в кресле) передних пар и/или задних пар опорно-ходовых колес. Для этого в каждом плече колесная ось установлена на конце продольной оси плеча с возможностью вращения колесной оси с колесом в плоскости, перпендикулярной продольной оси плеча. Эта продольная ось механически связана с рулевой системой для возможности синхронного поворота всех колес на одной паре крестовин или на всех крестовинах одновременно.
Согласно п.2 формулы изобретения транспортное средство отличается тем, что каждое плечо всех крестовин выполнено с возможностью синхронного одновременного регулирования длины всех плеч в каждой крестовине. Для этого каждое плечо каждой крестовины выполнено с механическим, или гидравлическим, или электрическим приводом для удлинения или укорочения длины плеча с соответствующим удлинением или укорочением расстояния от осей каждого ходового колеса до оси своей крестовины. Перед каждым ходовым опорным колесом на каждом плече крестовин закреплен датчик-щуп для контакта с кромками ступеней лестниц, эскалаторов и других транспортных средств и отработки управляющего сигнала о величине дистанции от этого колеса до этой кромки. На транспортном средстве установлен авторегулятор, связанный со всеми датчиками-щупами для приема этих управляющих сигналов, связанный со всеми приводами регулировки длины плеч и связанный с приводами продольно-горизонтальной передвижки колесных опор. Авторегулятор предназначен по сигналам датчиков-щупов для авторегулирования длины продольных левой и правой базы между осями крестовин соответственно с левой и правой стороны. Этим обеспечивается автоматическая постановка всех опорных ходовых колес ближе к вертикальной стенке ступенек для повышения устойчивости транспортного средства при подъеме и спуске по лестницам.
Согласно п.3 формулы изобретения транспортное средство отличается тем, что приводы выполнены с механизмами автоматической блокировки, например с храповыми механизмами, переключаемыми обслуживающим лицом или человеком в кресле-коляске. Эти механизмы предназначены для блокировки обратного хода крестовин и обратного ходовых опорных колес, а также для блокировки аварийного произвольного или рулевого горизонтального поворота колес при подъеме и спуске по ступенькам лестниц и движении по плоской поверхности.
Согласно п.4 формулы изобретения транспортное средство отличается тем, что на раме слева и справа закреплены вертикальные опоры. На верхнем конце каждой опоры закреплена горизонтальная ось. На этих осях по типу маятника закреплено кресло для сидения человека с возможностью вертикального произвольного выравнивания этого кресла с человеком за счет расположения общего центра тяжести кресла с человеком ниже линии опоры кресла на эти оси при наклоне транспортного средства в процессе подъема и спуска по лестнице.
Согласно п.5 формулы изобретения транспортное средство по п.4 отличается тем, что система опор для закрепления грузонесущей конструкции или кресла выполнена, например, из четырех опор с ручным, или механическим, или гидравлическим, или электрическим полуавтоматическим или автоматическим приводом. Приводы предназначены для регулирования длины этих опор с возможностью горизонтального или вертикального выравнивания расположения груза на транспортном средстве или выравнивания кресла с человеком на кресле-коляске, и/или для регулирования высоты этого груза или этого кресла с человеком, и/или для смещения груза или кресла вдоль рамы для повышения устойчивости транспортного средства на лестнице.
Согласно п.6 формулы изобретения транспортное средство отличается тем, что его рама выполнена с раздвижными в поперечном направлении направляющими для закрепления колесных стоек. Этим обеспечивается формирование свободного внутреннего пространства во внутренней площади опоры транспортного средства, в котором обеспечивается возможность расположения груза или человека на поверхности и посредине транспортного средства перед подъемом этого груза на грузонесущую конструкцию или для подъема и посадки человека в кресло кресла-коляски. Раздвижные направляющие выполнены с механическим, или гидравлическим, или электрическим приводом для их поперечной раздвижки или сдвижки. На раме установлен подъемным кран или лебедка с механизмом закрепления груза на уровне пола или земли или на более высоком уровне для подъема и переноса этого груза или человека на транспортное средство или механизированной перегрузки груза или человека на другую опору.
Согласно п.7 формулы изобретения транспортное средство отличается тем, что колесное шасси выполнено с механизмом горизонтального поворота опорных колес в разные стороны на 90 и 180 градусов. Этим обеспечивается автономный разворот транспортного средства на месте, и/или его крутой поворот на малой площадке, и/или его боковое смещение на ступеньках лестниц и эскалаторов. Для этого транспортное средство содержит механизмы блокировки вращения осей определенных или всех ходовых опорных колес.
Согласно п.8 формулы изобретения транспортное средство отличается тем, что на нем установлены механизмы блокировки вращения осей определенных или всех ходовых опорных колес и фиксированное расположение датчиков-щупов между каждым колесом и вертикальной стенкой ближней ступеньки. Этим обеспечивается безаварийный автономный подъем и спуск этого транспортного средства по ступенькам лестниц, эскалаторов и других транспортных средств за счет поворота крестовин с колесами, развернутыми параллельно длине этих ступеней.
Согласно п.9 формулы изобретения транспортное средство отличается тем, что на нем установлен возимый электрический аккумулятор, электрические реверсивные электродвигатели, автоприводы и программный пульт для полуавтоматического и/или автоматического управления направлением движения и режимами транспортировки грузов или человека этого транспортного средства. Это обеспечивает оптимальную устойчивость транспортного средства при подъеме и спуске по ступенькам лестниц, эскалаторов и других транспортных средств, а также простоту и комфортность управления таким транспортным средством.
Краткое описание чертежей
На фигуре 1 изображена кинематическая схема кресла-коляски с механическим управлением левой рукой (вид спереди в положении спуска по лестнице).
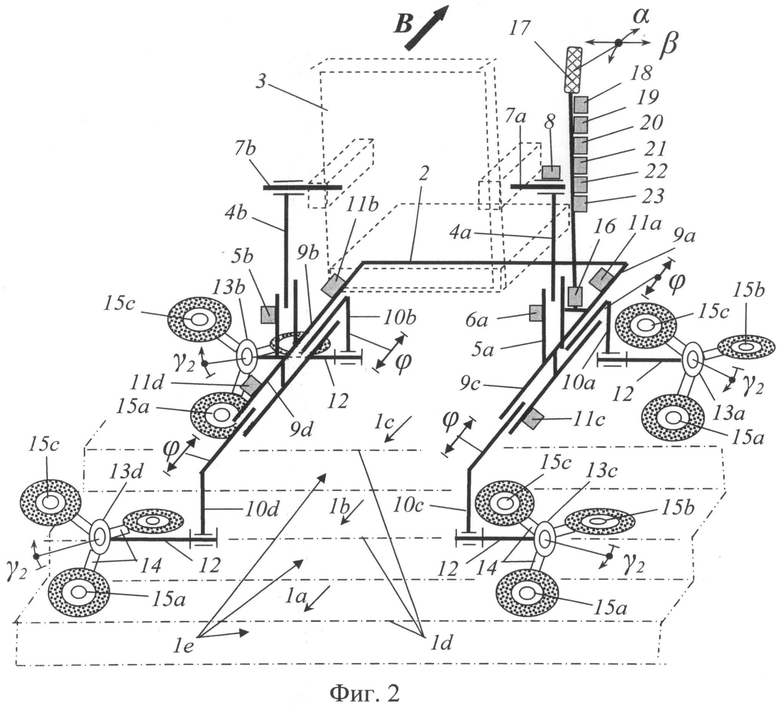
На фигуре 2 изображена кинематическая схема кресла-коляски с механическим управлением правой рукой (вид сзади в положении подъема по лестнице).
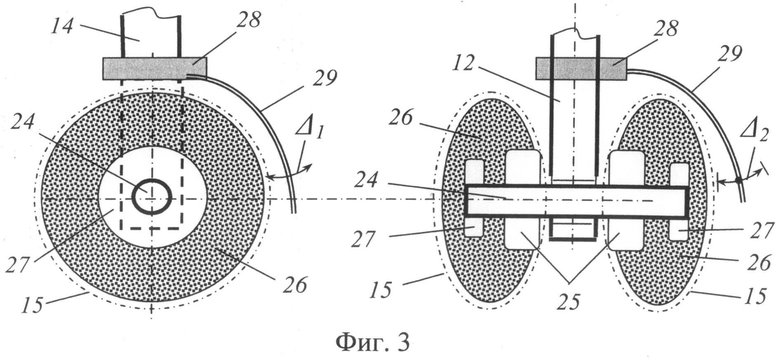
На фигуре 3 изображен блок колесного шасси с двойным опорно-ходовым колесом на конце плеча крестовины с датчиком-щупом.
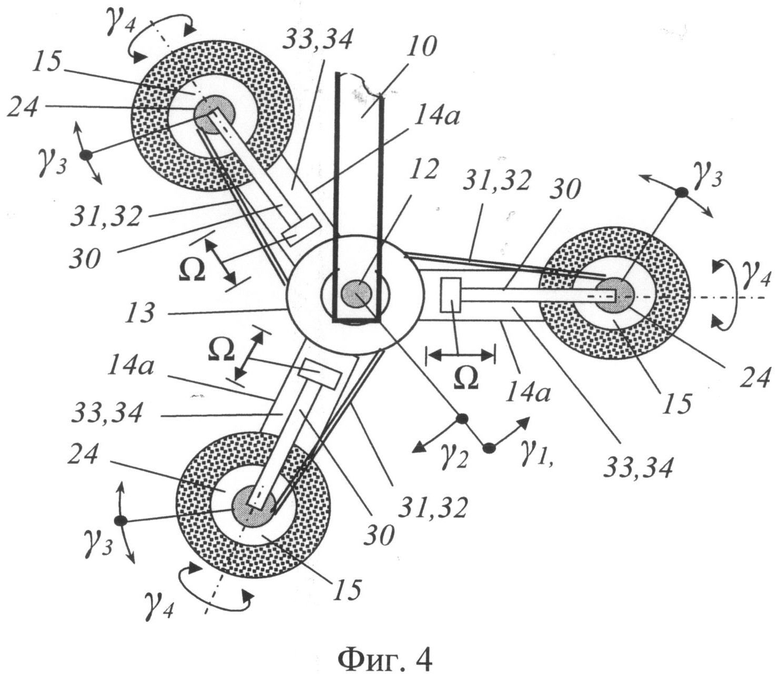
На фигуре 4 изображена трехплечая крестовина колесного шасси с удлиняемыми гидроприводами плечами с ходовыми опорными колесами на конце каждого плеча.
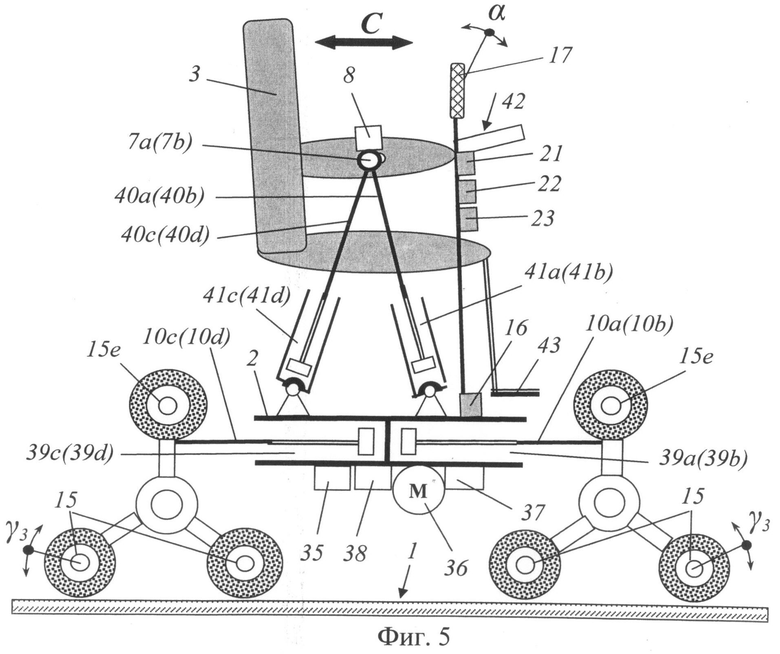
На фигуре 5 изображена кинематическая схема кресла-коляски (вид справа) в процессе его движения по плоской поверхности с механическими и гидравлическими ручными приводами для управления передвижения и регулирования механизмов.
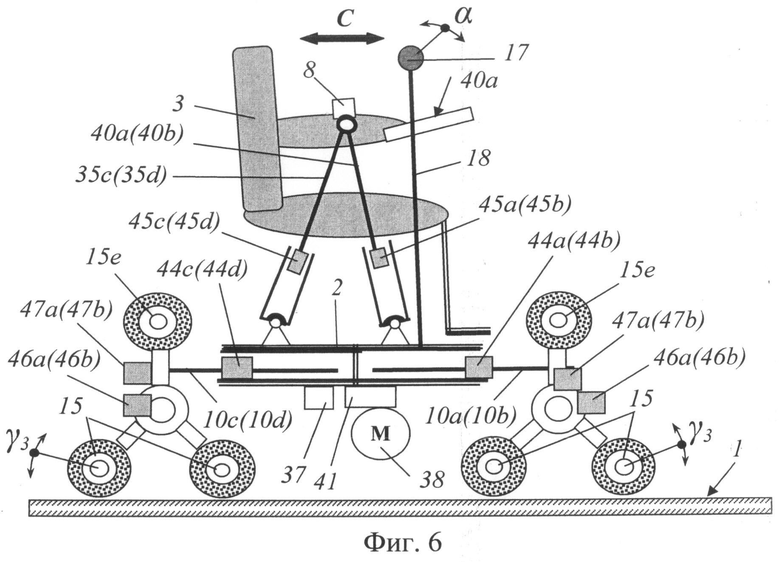
На фигуре 6 изображена кинематическая схема кресла-коляски (вид справа) в процессе его движения по плоской поверхности с электрическими приводами для управления передвижения и регулирования механизмов.
На фигуре 7 изображена кинематическая схема грузового транспортного средства (вид справа) с электрическими приводами, горизонтально выровненным грузом в режиме его подъема по лестнице на ходовых опорных колесах, развернутых параллельно длине ступенек лестницы.
На фигуре 8 изображена кинематическая схема грузового транспортного средства (вид справа) в процессе его подъема по лестнице с электрическими приводами, горизонтально выровненным грузом в режиме его подъема по лестнице на ходовых опорных колесах, развернутых на ступеньках вдоль траектории подъема.
На фигуре 9 изображена кинематическая схема грузового транспортного средства (вид справа) с электрическими приводами в режиме его горизонтального движения по плоской поверхности.
Осуществление изобретения
На фигурах 1, 2, 5 и 6 показано кресло-коляска для автономной транспортировки человека в кресле с ограниченными возможностями (без поддержки и управления креслом-коляской обслуживающим лицом). С помощью физических усилий одной руки человека, сидящего в кресле, предложенное кресло-коляска может ехать на своих ходовых опорных колесах по плоской поверхности и шагать на заблокированных от вращения ходовых колесах при вращения крестовин при подъеме и спуске по ступенькам лестниц, эскалаторов и другого транспорта. На чертеже показаны: 1a - горизонтальная поверхность нижней ступеньки лестницы, 1b - горизонтальная поверхность второй ступеньки лестницы, расположенной выше, 1с - горизонтальная поверхность третьей ступеньки лестницы, расположенной еще выше, 1d - кромки этих ступенек, 1e - вертикальные стенки этих ступенек. Кресло-коляска содержит прочную раму 2. Кресло 3 для сидения человека закреплено с правой стороны на правой вертикальной стойке 4а и с левой стороны на левой вертикальной стойке 4b. Сверху посредине на правой стороне рамы неподвижно закреплена вертикальная направляющая 5а, а на левой стороне этой рамы закреплена левая вертикальная направляющая 5b. В верхнем конце каждой из направляющих 5а и 5b, механически связанных с ручными приводами 6а и 6b для подъема и спуска этими стойками кресла над рамой, закреплена винтовая передача, механически связанная с соответствующей стойкой 4а и 4b. В правом подлокотнике кресла закреплена правая поперечная горизонтальная ось 7а, а на левом подлокотнике - левая горизонтальная поперечная ось 7b, на которых закреплены верхние концы соответствующих стоек 4а и 4b, с возможностью поворота этих осей в вертикальной продольной плоскости кресла-коляски для обеспечения естественного вертикального выравнивания кресла с человеком за счет их общей силы тяжести. Для фиксации вертикального положения кресла на оси 7b установлен фиксатор 8. На раме закреплены четыре продольные горизонтальные направляющие: впереди на правой стороне рамы - правая передняя направляющая 9а, а на левой стороне - левая передняя направляющая 9b, сзади на правой стороне рамы - правая задняя направляющая 9с, а на левой стороне - левая задняя направляющая 9d. В каждой такой направляющей установлена с продольной подвижностью горизонтальная ось уголковой колесной стойки: в направляющей 9а - горизонтальная ось правой передней стойки 10а, в направляющей 9b - горизонтальная ось передней левой стойки 10b, в направляющей 9с - горизонтальная ось правой задней стойки 10с и в направляющей 9d - горизонтальная ось задней левой стойки 10d. В каждой определенной направляющей 9а, 9b, 9с и 9d закреплена соответствующая винтовая передача 11а, 11b, 11с и 11d, механически связанная с расположенной в этой направляющей горизонтальной осью колесной стойки и механически связанная с ручным приводом для продольного горизонтального смещения (в пределах расстояния φ) горизонтальных осей колесных стоек в своих направляющих. На нижнем конце каждой колесной стойки 11a, 11b, 11c и 11d закреплены по одной горизонтальной поворотной оси 12с возможностью вращения этой оси в вертикальной продольной плоскости. На оси 12 определенной колесной стойки 11a, 11b, 11с и 11d неподвижно закреплена трехплечая крестовина: соответственно правая передняя крестовина 13а, левая передняя крестовина 13b, правая задняя крестовина 13с и левая задняя крестовина 13d. На ступице любой крестовины неподвижно закреплены по три плеча 14, расположенные в плоскости, перпендикулярной горизонтальной оси поворота крестовины, с равными радиальными углами между этими плечами. В каждом таком плече смонтирована подвижно продольная поворотная ось с возможностью продольного смещения этой оси вдоль плеча и вращения этой оси в плоскости, перпендикулярной длине этой оси. На удаленном от оси крестовины конце каждой такой продольной оси закреплена перпендикулярно длине этой оси поворотная колесная ось, на которой неподвижно закреплено одинарное или предпочтительно двойное ходовое опорное колесо 15 с возможностью вращения этой осью своего колеса в любой плоскости, продольной длине этого плеча. Ходовое колесо в разных режимах движения обозначено следующими позициями: 15 - режим вертикальной опоры кресла-коляски на вертикально поставленное на горизонтальную поверхность колесо, 15а - режим вертикальной опоры кресла-коляски на вертикально поставленное колесо на лестничной ступеньке, 15b - режим вертикальной опоры на боковую сторону колеса, 15с - режим холостого хода без опоры на это колесо. На раме установлен универсальный механический привод 16, связанный с рычагом 17. Ручное качание этого рычага по стрелке α человеком (сидящим в кресле-коляске) обеспечивает получение рабочих механических моментов, преобразуемых приводом 16 в поступательное или вращательное движение для работы: всех механических регулировок кресла-коляски, режимов автономной транспортировки по ровной поверхности, подъема и спуска по лестницам. С помощью определенных храповых механизмов и рычага 17 (качаемого по стрелке β) включают механические приводы и поворачивают требуемые ходовые опорные колеса. Для регулировки горизонтального продольного положения относительно рамы колесных опор 11а, 11b, 11c, 11d на рычаге 17 смонтирован переключатель 18 с двухсторонним храповым механизмом, механически связанным с приводом 16 и винтовыми передачами 11а и 11b. Для регулировки над рамой высоты кресла на рычаге 17 установлен переключатель 19 с двухсторонним храповым механизмом, механически связанным с приводом 16 и винтовыми передачами 6а и 6b. Для регулировки длин каждого плеча всех крестовин на рычаге 17 установлен переключатель 20 с двухсторонним храповым механизмом, механически связанный с приводом 16 и винтовым механизмом 29 для удлинения продольной оси. Для правильного направления вращения крестовин 13а, 13b, 13c, 13d в вертикальной плоскости и/или блокировки от аварийного вращения на раме смонтирован двухсторонний храповый механизм 21, механически связанный с приводом 16 и с осями крестовин 12. Для правильного направления поворота ходовых колес 15, 15а, 15b, 15с в горизонтальной плоскости или блокировки от аварийного поворота на рычаге 17 установлен переключатель 22 с двухсторонним храповым механизмом, механически связанным с приводом 16 и с каждой поперечной осью плеча. Для регулировки правильного направления вращения ходовых колес 15, 15а, 15b, 15с в вертикальной плоскости и блокировки этих колес от их аварийного вращения на рычаге 17 смонтирован переключатель 23 с двухсторонним храповым механизмом, механически связанным с приводом 16 и горизонтальной осью каждого ходового опорного колеса.
На фигуре 3 показан блок колесного шасси (вид ходового колеса сбоку и справа в продольном вертикальном разрезе). Блок колесного шасси (монтируемый на конце одного любого плеча крестовины) содержит два опорных ходовых колеса 75 (штриховыми линиями показаны контуры отдельных колес). Оба колеса закреплены неподвижно на общей горизонтальной поворотной колесной оси 24. Эта ось закреплена поворотно на конце продольной оси плеча 14 крестовины с возможностью вращения ходовых опорных колес в вертикальной плоскости. На общей оси неподвижно насажены два прочных диска 25 (для монтажа двух ходовых колес на этой оси). На каждом диске с внешней стороны от оси смонтирована колесная шина 26, закрепленная на диске фиксирующей гайкой 27, прикрученной на торце этой оси 24. Шины с двух сторон закрывают эти диски от контакта со ступенькой и поверхностью опоры по радиусу (при вертикальной опоре на колеса на шину) и с внешней боковой стороны колеса (при опоре колеса на боковую сторону колеса при наклоне колеса на ступеньках лестниц). На плече крестовины 14 закреплен авторегулятор 28 для автоматической оптимальной постановки своего ходового колеса на расчетную точку на ступеньке лестницы (обеспечивающий оптимальную устойчивость кресла-коляски при подъеме и спуске на ступеньках лестниц, эскалаторов и других транспортных средств). На авторегуляторе закреплен пружинистый контактный датчик-щуп 29 для измерения (при механическом контакте этого датчика с кромкой ступеньки лестницы) дистанции Δ1 при вертикальном продольном положении колеса или дистанции Δ2 при колесе, развернутом на 90 градусов относительно линии движения кресла-коляски. Δ1, Δ2 - дистанции от этого колеса до вертикальной стенки и кромки ступенек лестниц, по длине этих дистанций датчик отрабатывает управляющий сигнал, подаваемый на свой авторегулятор 28, чем обеспечивается безаварийное автоматическое управление движением кресла-коляски при подъеме и спуске по ступенькам лестниц, эскалаторов и другого транспорта.
На фигуре 4 показан боковой вид блока колесного шасси. Блок содержит уголковую колесную опору 10. В отверстии на нижнем конце вертикальной части этой опоры закреплена горизонтальная поворотная ось 12. На этой оси закреплена неподвижно трехплечая крестовина 13 с тремя плечами 14 с возможностью ее поворота только своей осью 12 в вертикальной плоскости в любую сторону, например, с поворотом этой крестовины по стрелке γ1 при спуске по лестнице или с поворотом по стрелке γ2 при подъеме по лестнице. Вдоль каждого плеча установлена продольная поворотная ось 30 с возможностью вращения этой оси по стрелке γ4 в плоскости, перпендикулярной этой оси. Этим обеспечивается поворот колеса при маневре и изменении направления движения кресла-коляски влево или вправо или поворот на 90 градусов ходовых колес в горизонтальной плоскости с блокировкой этих колес при подъеме и спуске по лестницам в шаговом режиме вращения крестовин. На внешнем конце поворотной продольной оси 30 в каждом плече каждой крестовины закреплена горизонтальная колесная ось 24 (перпендикулярная оси 30) с неподвижно закрепленным на оси 24 ходовым колесом 15 с возможностью поворота в любую сторону по стрелке γ3 каждой осью 24 своего колеса 15 в плоскости, параллельной своей оси 30, и поворота того же колеса в любую сторону по стрелке γ4 в плоскости, перпендикулярной оси 30. Для продольного удлинения всех плеч всех крестовин (за счет продольного смещения продольной оси 30 плеча вдоль этого плеча) в каждом плече смонтирована механическая винтовая 33. На плече также смонтированы передача 31, механически связанная с осью ходового колеса (для осевого вращения этого колеса при линейном движении кресла-коляски) и механическая передача 32, механически связанная с продольной поворотной осью плеча 30 (для вращения этой оси в плоскости, перпендикулярной оси 30 (для поворота ходового колеса в той же плоскости в разные стороны по направлениям стрелки γ4). Этим обеспечивается поворотное рулевое управление и маневр кресла-коляски, а также поворот колес на 90 градусов (для безаварийного подъема или спуска на лестницах в шаговом режиме с поворотом крестовин). Каждая механическая передача 31 и 32 выполнена, например, в виде телескопического вала с коническими зубчатыми колесами на концах этих валов. Одна такая передача установлена для передачи вращательных моментов продольной поворотной оси, а другая - для передачи вращательных моментов горизонтальной оси ходового колеса. Для рабочего удлинения каждого плеча крестовины в этом плече смонтирован винтовой механизм 33 или гидравлический цилиндр 34, связанные механически с ручным или электрическим приводом для их регулировки этим приводом длины плеча по стрелкам в пределах расстояния Ω. Плечо из трубчатой стойки 14а монолитно выполнено вместе со ступицей крестовины. Механизм 33 или 34 закреплен внутри этой стойки на ближнем к оси крестовины конце оси 30. В гидроцилиндре поршень гидроцилиндра закреплен на ближнем к оси крестовины конце оси 30.
Кресло-коляска, показанное на фигурах 1, 2, 3, 4, используется сидящим в кресле для своей автономной транспортировки следующим образом следующим образом. Человек, сидящий в кресле-коляске (показанном на фигуре 1), перед спуском по стрелке A с лестницы блокирует храповыми механизмами произвольный поворот всех крестовин и медленно осторожно подъезжает к краю первой верхней ступеньки лестницы на безопасном расстоянии передних ходовых колес от кромки верхней ступеньки, равном примерно ширине ступеньки. Рулевой системой разворачивает на 90 градусов все ходовые колеса передних крестовин. Включает храповые механизмы блокировки вращения всех ходовых колес пары передних крестовин и выключает фиксаторы продольной раздвижки пары передних уголковых колесных опор и включает храповый механизм для обратного хода на ходовых колеса пары задних крестовин. Кресло-коляску отводят задними ходовыми колесами назад, обеспечивая максимальную или известную по опыту оптимальную продольную раздвижку колесных стоек для расширения колесной продольной базы между осями передних и задних осей крестовин. Фиксирует фиксаторами на направляющих рамы начальную раздвижку колесных стоек. Включает храповые механизмы синхронного вращения крестовин в направлении спуска кресла-коляски с лестницы и блокирует этими храповыми механизмами произвольное вращение передних крестовин в том же направлении. Ручным приводом опускает пары верхних ходовых опорные колес пары передних крестовин на две соседние ступеньки. Визуально контролируя равные безопасные дистанции этих колес от вертикальных стенок этих ступеней, включает храповые механизмы синхронной регулировки длины всех плеч всех крестовин и регулирует приводом длину каждого плеча до равенства дистанций от каждых двух колес передних крестовин, опирающихся на две ступеньки, до вертикальных стенок этих ступенек. После этого фиксирует фиксатором эту длину плеч от произвольного укорочения или удлинения при спуске, поворачивает ходовые колеса задних крестовин на 90 градусов. Затем включает храповый механизм синхронного вращения ручным приводом всех крестовин одновременно и продолжает спуск ручным вращением уже всех крестовин до начала правильной опоры на верхнюю ступеньку ходовых колес задних крестовин, контролируя визуально постановку пары колес каждой задней крестовины на две верхних ступеньки. При неправильной дистанции от этих колес до вертикальных стенок соседних ступеней эти колеса разворачивают и регулируют с визуальным контролем. Ручным приводом смещают задние колесные стойки до установки оптимальной продольной базы между осями передних и задних крестовин (для правильной постановки всех ходовых колес по ступенькам в процессе спуск с лестнице) При этом визуально контролируют неточности такой регулировки и повторяют регулировку длины этой продольной базы между крестовинами, регулируя механическими приводами только длину плеч крестовин. При спуске по лестнице фиксатором кресла можно фиксировать произвольное вертикальное положение кресла до конца спуска. После завершения спуска все механизмы, все крестовины и все ходовые опорные колеса регулируют до их нормального положения для движения по ровной поверхности (как показано на фигурах 5 и 6).
Подъем на кресле-коляске по ступеньке (как показано на фигуре 2) производится по стрелке B в следующем порядке. Человек (сидящий в кресле) подъезжает на ходовых опорных колесах своего кресла-коляски до упора передней пары ходовых колес в вертикальную стенку первой ступеньки лестницы. Разворачивает рулевым управлением на 90 градусов все ходовые колеса передней пары крестовин. Выключает фиксатор на кресле для самовыравнивания кресла. Включает храповые механизмы для правильного синхронного вращения передних крестовин с блокировкой вращения всех ходовых колес этих крестовин. Выключает храповые механизмы - фиксаторы для продольной произвольной на раме раздвижки передних крестовин при фиксации от раздвижки задних крестовин. Вращением ручным приводом передних пар крестовин поднимается по двум первым ступенькам. Контролируя визуально положение этих колес на первых двух ступеньках лестницы первых двух ступенек лестницы, включает храповые механизмы и ручным приводом синхронно регулирует длину всех плеч всех крестовин одновременно. Затем вручную этими храповыми механизмами блокирует произвольное изменение длины этих плеч всех крестовин. Вращением крестовин поднимает кресло-коляску на следующие ступеньки и визуально контролирует безопасную постановку на две нижние ступеньки пар ходовых колес каждой задней крестовины. Ручным приводом регулирует оптимальную длину продольной базы осей крестовин и фиксирует задние колесные стойки в направляющих рамы от их произвольных раздвижек и сдвижек. Разворачивает на 90 градусов все колеса пары задних крестовин и поднимает по лестнице кресло-коляску (качанием ручного привода вперед-назад), вращая синхронно все крестовины с блокировкой храповыми механизмами обратного произвольного вращения этих крестовин, а также с блокировкой вращения и разворота ходовых опорных колес. До конца подъем контролирует безопасную постановку на ступеньки всех ходовых колес и при необходимости корректируют раздвижку или сдвижку плеч. После выезда на ровную площадку переводят все храповые механизмы, крестовины и ходовые колеса в нормальное положение для движения по ровной горизонтальной или наклонной поверхности (как показано на фигурах 5 и 6).
Кресло-коляска на фигурах 5 или 6 показано в положении качения по плоской поверхности 1d (в направлении по стрелке С) с постоянной опорой на восемь ходовых опорных колес 15 с четырьмя поднятыми неработающими ходовыми колесами 15e. На фигуре 5 показан вид справа автоматизированного электрического кресла-коляски для комфортного управления и автономного транспортирования человека в кресле по плоской поверхности 1 и по лестницам (без физических усилий человека с ограниченными возможностями, транспортируемого на этом кресле-коляске и без обслуживающего лица). Для этого на раме такого кресла-коляски расположены: возимый электрический аккумулятор 35, реверсивный электродвигатель 36 с редуктором 37, гидравлический автопривод, содержащий электрический гидронасос 38, гидроцилиндры и автоматическую систему управления этими гидроцилиндрами на кресле-коляске. С определенными направляющими 9a, 9b, 9c и 9d рамы - с одной стороны и с определенными колесными стойками 10a, 10b, 10c и 10d - с другой стороны механически связаны соответствующие гидроприводы 39a, 39b, 39c и 39d. Эти гидроприводы обеспечивают продольное горизонтальное смещение и фиксацию положения этих стоек относительно рамы. На верху рамы справа от кресла для опоры кресла на раме установлены вертикальные правая передняя опора 40a и правая задняя опора 40b. Слева от этого кресла на верху рамы установлены вертикальная левые передняя 40c и левая задняя опоры 40d. Снизу эти опоры закреплены на шарнирах рамы. Сверху правые опоры закреплены на общей горизонтальной правой оси 7a в правом подлокотнике кресла, а левые опоры на левой общей оси кресла 7b (в левом подлокотнике этого кресла). Нижний конец каждого такого гидропривода закреплен на шарнире рамы. Кресло на этих стойках подвешено по типу маятника с возможностью его качания на осях 7a и 7b в продольной вертикальной плоскости для самостоятельного вертикального выравнивания под общим весом кресла с сидящим в нем человеком. При этом на одной такой горизонтальной оси на кресле установлен ручной фиксатор 8 вертикального положения кресла, комфортного для человека в этом кресле. В нижней части каждая опора механически связана со своим гидроприводом (опора 40а - с гидроприводом 41а, опора 40b - с гидроприводом 41b, опора 40с - с гидроприводом 41c и опора 40d - с гидроприводом 41d). На каждом плече крестовин перед ходовым колесом установлен датчик-щуп 29 и связанный с ним авторегулятор 28 (как показано на фигуре 3). Авторегулятор 28 электрически связан с гидравлическим автоприводом. Авторегулятор 28 электрически связан с пультом автоматического регулирования 42 (установленным на подлокотнике кресла). Пульт 42 электрически связан с гидравлическим автоприводом. Для автоматического рабочего продольного удлинения или укорочения этого плеча по сигналу датчика-щупа в каждом таком плече смонтирован только гидравлический цилиндр 34 (согласно фигуре 4), подключенный к системе автоматического гидропривода и пульту автоматического управления 42. На каждом плече установлены механические передачи 31 или 32 для передачи вращательных движений от редуктора к продольно оси 30 плеча для поворота кресла коляски и маневра кресла-коляски и к горизонтальной оси 24 ходового колеса и для движения на ходовых колесах по плоской поверхности. На раме установлены храповые механизмы для регулировки направления вращения и блокировки крестовин и поворота и вращения ходовых колес для безаварийного подъема и спуска кресла-коляски по лестнице. На кресле смонтирована подножка 43 для опоры ног человека, сидящего в кресле. Колеса 15е подняты над опорной поверхностью в нерабочее положение. Кресло-коляска катится по ровной поверхности 1 на восьми колесах 15 при вращении всех ходовых колес 15 по направлению стрелок γ3. Рычаг 17 предназначен только для ручного руления его качанием по стрелке α (для поворота ходовых колес только в горизонтальной плоскости). Переключатели с храповыми механизмами 21, 22 и 23, установленные на этом рычаге, предназначены для ручного управления соответственно направлением вращения и блокировки крестовин, направления поворота и блокировки от поворота ходовых колес и направления вращения и блокировки ходовых колес для линейного движения кресла-коляски. Пульт управления 40а выполнен с автоматическим программным управлением всеми храповыми механизмами, режимами работы и последовательностью рабочих процессов (аналогичной описанной последовательности работы кресла-коляски на фигурах 1 и 2). Но переключение всех указанных механизмов и регуляторов механических систем обеспечивается авторегулировкой с пульта для автоматического движения с визуальным контролем и только ручным рулением ходовых колес в режимах движения по плоской поверхности, а также подъема и спуска по ступенькам лестниц, эскалаторов и другого транспорта.
На фигуре 6 изображен вид справа полностью электрического автоматизированного кресла-коляски, содержащего возимый электрический аккумулятор 35, реверсивный электродвигатель 36 с редуктором 37 и пультом 42a электронного управления всеми электрическими приводами для комфортной транспортировки человека. С определенными направляющими 9a, 9b, 9c и 9d рамы с одной стороны и с определенными колесными стойками 10a, 10b, 10c и 10d с другой стороны механически связаны соответствующие электроприводы 44a, 44b, 44c и 44d для продольного горизонтального смещения и фиксации положения этих стоек относительно рамы. На верху рамы 2 (аналогично на фигуре 5) на вертикальных опорах 40а, 40b, 40с и 40d и на горизонтальных осях в подлокотниках кресла это кресло подвешено по типу маятника. Фиксатор 8 на оси кресла предназначен для фиксации вертикального комфортного положения человека в этом кресле. В нижней части каждая опора механически связана со своим винтовым реверсивным электроприводом: опора 40а - с электроприводом 45а, опора 40b - с электроприводом 45b, опора 40с - с электроприводом 45с и опора 40d - с электроприводом 45d. Эти электроприводы закреплены на раме на шарнирах. Для регулировки длины каждого плеча 14 каждой крестовины 13 (как показано на фигуре 4) в каждом плече смонтирован реверсивный электрический привод 46 для вращения этих крестовин. Для вращения ходовых колес на каждой крестовине установлен реверсивный электрический привод 47, а на плечах крестовин установлены механические передачи 31 и 32 для поворота колес при рулении и вращения этих колес при качении кресла-коляски на этих колесах. В системе управления используются электрические регуляторы, связанные с пультом управления (для правильного вращения крестовин и колес и их блокировки). Рычаг 17 (закрепленный шарнирно на раме) предназначен для руления поворотом ходовых колес. Безаварийное движение и устойчивость кресла-коляски на лестницах автоматически обеспечиваются программной авторегулировкой всех механизмов и электроприводов кресла-коляски без вмешательства человека, сидящего в кресле и без помощи обслуживающего лица.
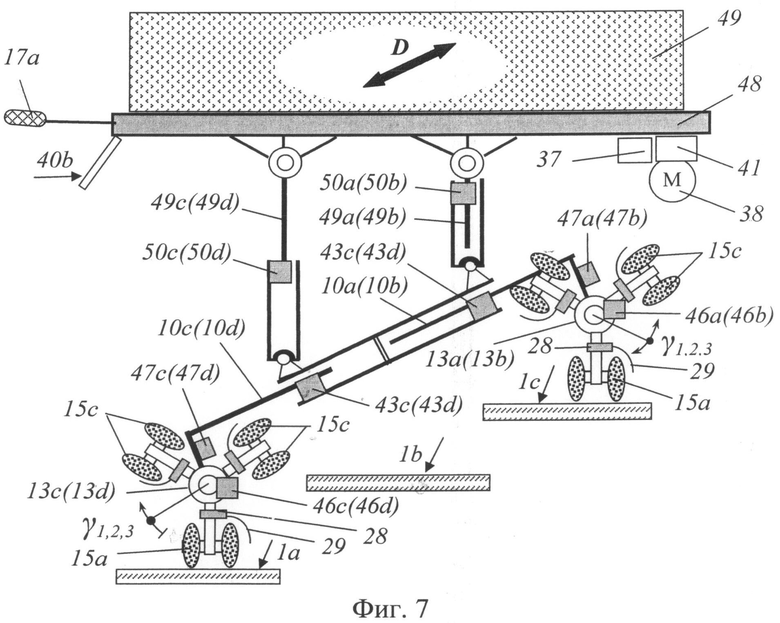
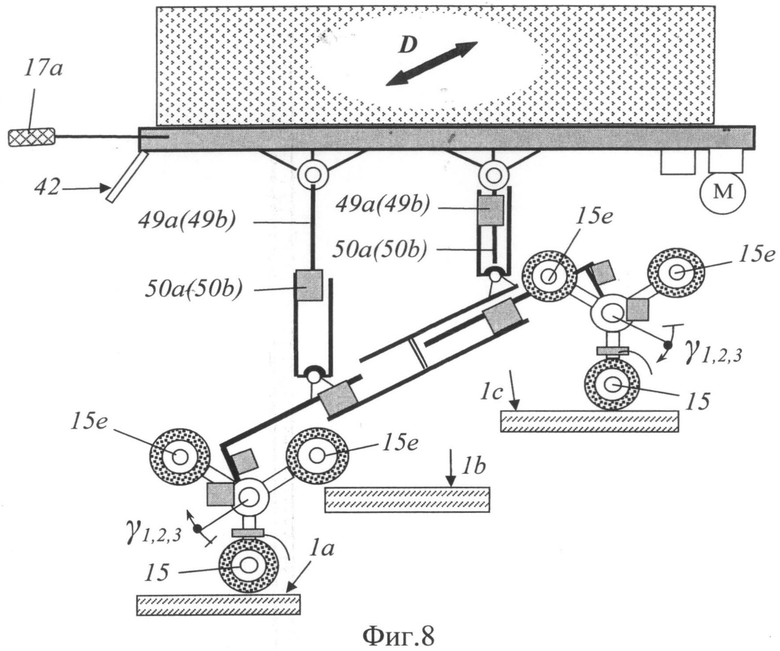
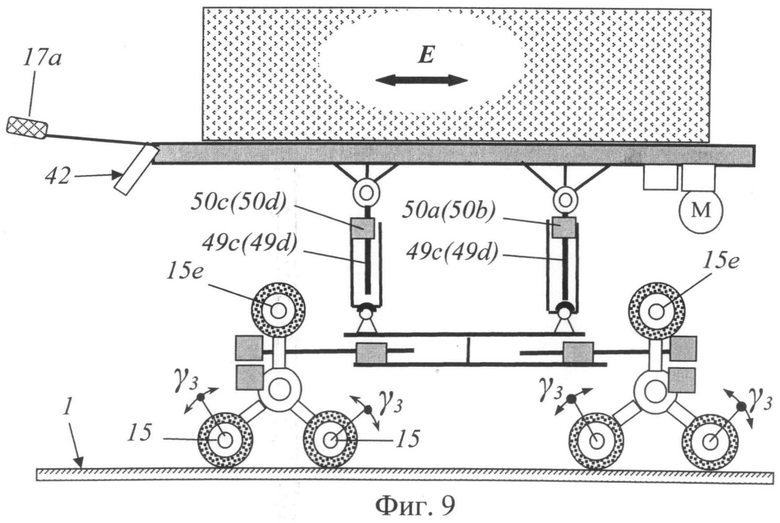
На фигуре 7 грузовая тележка показана в режиме подъема по лестнице по стрелке D (в шаговом режиме с вращением только крестовин с заблокированными от вращения ходовыми колесами, повернутыми параллельно длине ступенек лестницы). На фигуре 8 показана та же тележка в режиме подъема по лестнице по стрелке D в шаговом режиме вращения крестовин и ходовых колес (развернутых продольно направлению подъема. На фигуре 9 показана та же грузовая тележка в режиме качения по стрелке Е по плоской поверхности на 8-ми ходовых колесах 15). На фигуре 7 механика и приводы, а также рабочие процессы и авторегулировки грузовой на грузовой тележке аналогичны по конструкции креслу-коляске, показанному на фигуре 6, описанной выше. На фигуре 7 показана грузовая тележка с грузом 49 (на грузонесущей конструкции 47). Грузонесущая конструкция выровнена горизонтально с помощью четырех мощных определенных опор 49а, 49b, 49с и 49d, снабженных мощными соответствующими электроприводами 50а, 50b, 50с и 50d для регулировки высоты этих опор выравнивания грузонесущей конструкции с грузом для безаварийного транспортирования за счет максимальной устойчивости тележки (за счет оптимального расположения общего центра тяжести в центре или в оптимальной точке в площади опоры на ступеньки тележки всеми опорными ходовыми колесами 15 при продольном наклоне тележки на лестнице в процессе подъема и спуска по ступенькам лестниц эскалаторов и другого транспорта. Транспортировка грузов этой тележкой обеспечивается дистанционно переносным или бортовым электронным пультом дистанционного программного управления 40b. Пульт обеспечивает автоматическое регулирование всех механизмов подъемных устройств, выбор и управления всех режимов движения грузовой тележки, дистанционный поворот и маневр тележки, а также погрузку и выгрузку грузов на тележке собственным краном или лебедкой без физических усилий человека. Человек на пульте только включает требуемый рабочий режим и направление движения по плоской поверхности и подъема и спуска по ступенькам лестниц, эскалаторов и другого транспорта и режимы погрузки и разгрузки.
Промышленная применимость
Предлагаемые конструкции транспортного средства легко могут быть рассчитаны известными стандартными методами и изготовлены в массовом количестве на базе имеющихся комплектующих материалов, на стандартном оборудовании с использованием стандартных технологий. Подобные транспортные средства уже давно выпускаются разными фирмами стран мира.
| название | год | авторы | номер документа |
|---|---|---|---|
| Инвалидная коляска | 1981 |
|
SU1069810A1 |
| ИНДИВИДУАЛЬНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2011 |
|
RU2466701C1 |
| ТРАНСФОРМИРУЕМОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2002 |
|
RU2217119C1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ ПОДЪЕМА ПО ЛЕСТНИЦАМ, ПРИВОДИМОЕ В ДЕЙСТВИЕ МОТОРОМ | 1998 |
|
RU2201367C2 |
| РУЧНАЯ ТЕЛЕЖКА | 1991 |
|
RU2011589C1 |
| КОЛЁСНО-ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ИНВАЛИДА | 2013 |
|
RU2542220C1 |
| Модуль колёсно-гусеничного движителя и шасси с двумя модулями | 2022 |
|
RU2784225C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО, ПРЕИМУЩЕСТВЕННО ДЛЯ ПЕРЕМЕЩЕНИЯ ЧЕЛОВЕКА ПО ЛЕСТНИЦАМ | 2008 |
|
RU2368366C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО, ПРЕИМУЩЕСТВЕННО ДЛЯ ПЕРЕМЕЩЕНИЯ ЧЕЛОВЕКА ПО ЛЕСТНИЦАМ | 2005 |
|
RU2304952C1 |
| Инвалидная коляска | 1990 |
|
SU1710038A1 |
Изобретение относится к транспортным средствам для транспортировки грузов и к креслам-коляскам для транспортировки человека с ограниченными возможностями по лестницам и плоской поверхности. Транспортное средство содержит прочную раму. Транспортное средство выполнено с ручным механическим или гидравлическим или полуавтоматическим и/или автоматическим электрическим и гидравлическим приводами или только с электрическими приводами. На нижнем конце каждой колесной опоры закреплена с возможностью вращения в вертикальной продольной плоскости колесная крестовина с тремя или четырьмя ходовыми колесами с возможностью вращения этих крестовин в вертикальной плоскости, вращения ходовых колес в вертикальной плоскости и поворота этих колес в горизонтальной плоскости при опоре этими колесами на плоскую поверхность или ступеньки лестниц, эскалаторов или другого транспорта. На транспорте установлены механическая или электронная рулевая система поворота колес и включения блокирующих устройств и контактные датчики-щупы для контакта с кромками ступеней лестниц и связанные с этими датчиками авторегуляторы для автоматического включения приводов или автоприводов и блокирующих устройств для правильного направления вращения всех крестовин и ходовых колес или их стопорения. Обеспечивается повышение устойчивости транспортного средства. 8 з.п. ф-лы, 9 ил.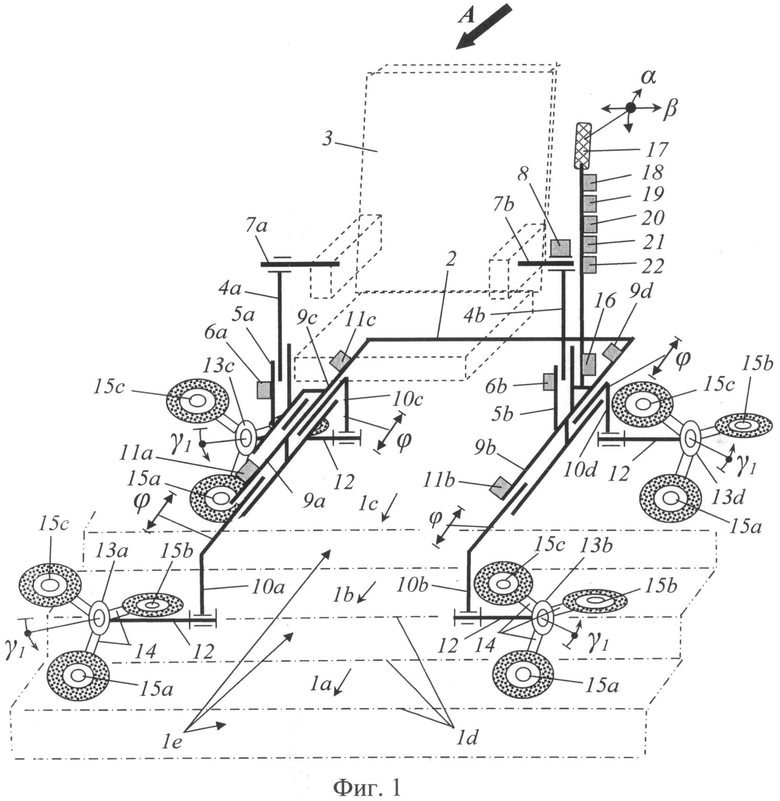
1. Транспортное средство для транспортировки грузов и людей по лестницам и плоской поверхности, содержащее раму, на раме закреплена грузонесущая конструкция для закрепления груза или кресло для сидения человека, а снизу на раме закреплено колесное шасси с ходовыми опорными колесами с возможностью вращения колес в любую сторону и подъемная механика для подъема транспортного средства по лестницам, содержащая механические или электрические приводы с системой управления этими приводами для регулирования и управления подъемной механикой, снизу на раме закреплена горизонтальная поворотная ось, на этой оси неподвижно закреплена крестовина с тремя или четырьмя плечами, неподвижно закрепленными на ступице крестовины, плечи расположены в вертикальной плоскости с равными углами между ними, на конце каждого плеча перпендикулярно его оси закреплена горизонтальная поворотная ось, на этой оси неподвижно закреплено ходовое опорное колесо с возможностью вращения этого колеса своей осью в любую сторону, привод механически связан с осью крестовины и осями ходовых опорных колес этой крестовины для вращения крестовины и колес в процессе подъема или спуска транспортного средства по ступенькам лестниц за счет опоры транспортного средства этими колесами на ступеньки, отличающееся тем, что колесное шасси выполнено из четырех трехплечих или четырехплечих крестовин с ходовыми опорными колесами на каждом плече каждой крестовины; на раме спереди слева и справа и сзади слева и справа закреплены по одной продольно-горизонтальной направляющей, а на каждой направляющей закреплена подвижно в горизонтально-продольном направлении колесная опора, выполненная в форме уголка, горизонтальная часть которой расположена в этой направляющей, а на нижнем конце вертикальной части колесной опоры закреплена горизонтальная поворотная ось, на которой неподвижно закреплена указанная трехплечая крестовина, на каждой направляющей установлен ручной механический или гидравлический или электрический привод для продольно-горизонтальной передвижки колесной стойки вдоль рамы для регулирования длины продольной левой и правой базы между осями пар крестовин слева и справа для постановки всех ходовых колес в точки безаварийной опоры на ступеньках лестниц, эскалаторов и других транспортных средств, а также для переноса центра тяжести транспортного средства с грузом или человеком в кресле по направлению от центра площади опоры на ходовые колеса вверх по лестнице, ось каждой крестовины связана механической передачей с механическим или электрическим приводом для автономного или синхронного вращения этой осью своей крестовины; на раме установлена рулевая система для поворота обслуживающим лицом или человеком, сидящим в кресле, автономно передних пар и/или задних пар опорно-ходовых колес, для чего в каждом плече колесная ось установлена на продольной оси, установленной на конце вдоль этого плеча с возможностью вращения колесной оси вокруг этой продольной оси, продольная ось механически связана с рулевой системой для возможности синхронного поворота всех колес на одной паре крестовин или на всех крестовинах одновременно.
2. Транспортное средство по п.1, отличающееся тем, что каждое плечо всех крестовин выполнено с возможностью синхронного одновременного регулирования длины всех плеч в каждой крестовине, для чего каждое плечо каждой крестовины выполнено с механическим, или гидравлическим, или электрическим приводом для удлинения или укорочения длины плеча для соответствующего удлинения или укорочения расстояния от осей каждого ходового колеса до оси своей крестовины; перед каждым ходовым опорным колесом на каждом плече крестовин закреплен датчик-щуп для контакта с кромками ступеней лестниц, эскалаторов и других транспортных средств и отработки управляющего сигнала о величине дистанции от этого колеса до этой кромки, на транспортном средстве установлен авторегулятор, связанный со всеми датчиками-щупами для приема этих управляющих сигналов и связан со всеми приводами регулировки длины плеч и связанный с приводами продольно-горизонтальной передвижки колесных опор для авторегулирования длины продольных левой и правой базы между осями крестовин соответственно с левой и правой стороны для автоматической постановки всех опорных ходовых колес ближе к вертикальной стенке ступенек для повышения устойчивости транспортного средства при подъеме и спуске по лестницам.
3. Транспортное средство по п.1, отличающееся тем, что приводы выполнены с механизмами автоматической блокировки, например с храповыми механизмами, переключаемыми обслуживающим лицом или человеком в кресле-коляске для блокировки обратного хода крестовин и обратного ходовых опорных колес, а также для блокировки аварийного произвольного или рулевого горизонтального поворота колес при подъеме и спуске по ступенькам лестниц и движении по плоской поверхности.
4. Транспортное средство по п.1, отличающееся тем, что на раме слева и справа закреплены вертикальные опоры, на верхнем конце каждой опоры закреплена горизонтальная ось, на этих осях закреплено кресло для сидения человека с возможностью вертикального произвольного выравнивания этого кресла с человеком по типу маятника за счет расположения общего центра тяжести кресла с человеком ниже линии опоры кресла на эти оси при наклоне транспортного средства в процессе подъема и спуска по лестнице.
5. Транспортное средство по п.4, отличающееся тем, что система опор для закрепления грузонесущей конструкции или кресла выполнена, например, из четырех опор с ручным, или механическим, или гидравлическим, или электрическим полуавтоматическим или автоматическим приводом для продольного регулирования длины этих опор с возможностью горизонтального или вертикального выравнивания расположения груза на транспортном средстве или кресла с человеком на кресле-коляске, и/или для регулирования высоты этого груза или этого кресла с человеком, и/или смещения груза или кресла вдоль рамы для повышения устойчивости транспортного средства на лестнице.
6. Транспортное средство по п.1, отличающееся тем, что для транспортировки грузов или человека его рама выполнена с раздвижными в поперечном направлении направляющими для закрепления колесных стоек, для формирования свободного внутреннего пространства с возможностью расположения груза или человека на поверхности и посредине транспортного средства перед подъемом этого груза на грузонесущую конструкцию или человека в кресло, раздвижные направляющие рамы выполнены с механическим, или гидравлическим, или электрическим приводом для их поперечной раздвижки или сдвижки, при этом на раме установлен подъемный кран или лебедка с механизмом закрепления груза на уровне пола или земли или на более высоком уровне для подъема и переноса этого груза или человека на транспортное средство или механизированной перегрузки груза или человека на другую опору.
7. Транспортное средство по п.1, отличающееся тем, что колесное шасси выполнено с механизмом горизонтального поворота опорных колес в разные стороны на 90 и 180 градусов для автономного разворота на месте транспортного средства или его крутого поворота на малой площадке, и/или его бокового смещения на ступеньках лестниц, эскалаторов и других транспортных средств, для чего транспортное средство содержит механизмы блокировки вращения осей определенных или всех ходовых колес.
8. Транспортное средство по п.1, отличающееся тем, что содержит механизмы блокировки вращения осей определенных или всех ходовых опорных колес для безаварийного подъема и спуска по ступенькам лестниц за счет поворота крестовин с колесами, развернутыми параллельно длине этих ступеней, с фиксированным расположением датчиков-щупов между каждым колесом и вертикальной стенкой ближней ступеньки.
9. Транспортное средство по п.1, отличающееся тем, что содержит возимый электрический аккумулятор, электрические реверсивные электродвигатели, автоприводы и программный пульт полуавтоматического и/или автоматического управления направлением движения и режимами транспортировки грузов или человека этого транспортного средства.
| ИНВАЛИДНАЯ КОЛЯСКА | 0 |
|
SU343893A1 |
| ПРЕДОХРАНИТЕЛЬНОЕ УСТРОЙСТВО ПРИСПОСОБЛЕНИЙ ДЛЯ ПОДЪЕМА ПО ЛЕСТНИЦАМ | 1998 |
|
RU2185987C2 |
| WO 1984004451 A1, 22.11.1984 | |||

