1 .
Изобретение относится к силоизмерительной технике и может быть использовано для измерения силы, веса в различных областях техники, преимущественно там, где в процессе измерения силы требуется обеспечить компенсацию давления окружающей среды.
Известен преобразователь силы, включающий корпус и силовоспринимающий элемент, подвижно связанные между собой посредством герметизирующей диафрагмы 1.
Недостатком этого преобразователя является то, что при«изменении давления окружающей среды происходит изменение величины выходного сигнала преобразователя, что вносит погрещность в результаты измерения.
Известен также преобразователь силы, включающий корпус и силовоспринимающий элемент, подвижно связанные между собой посредством диафрагмы, а также компенсатор давления окружающей среды, выполненный в виде кинематически связанных с корпусом и силовоспринимающим элементом герметичных сильфонов, .эффективная площадь которых в сумме равна эффективной площади диафрагмы .
В этом преобразователе также не обеспечена полная компенсация давления окружающей среды.
Известен преобразователь силы, включающий корпус и силовоспринимающий элемент, соединенные между собой подвижно посредством герметизирующих диафрагм, образующих компенсационное устройство 3.
Недостаток этого преобразователя заключается в том, что его компенсационное устройство не может быть применено с преобразователями других типов, например с гидравлическим компенсационным преобразователем силы.
15 Наиболее близким по технической сущности является преобразователь силы, содержащий корпус и силовоспринимающий щток с порщнем, связанные между собой посредством трех диафрагм, образующих
20 последовательно расположенные рабочую камеру, соединенную с системами подпитки и слива, и две компенсационные камеры 4.
Недостатком этого устройства является
25 малая точность измерения, что обусловлено влиянием давления окружающей среды на его выходной сигнал.
Целью изобретения является повыщение точности измерения за счет исключения
30 влияния давления окружающей среды.
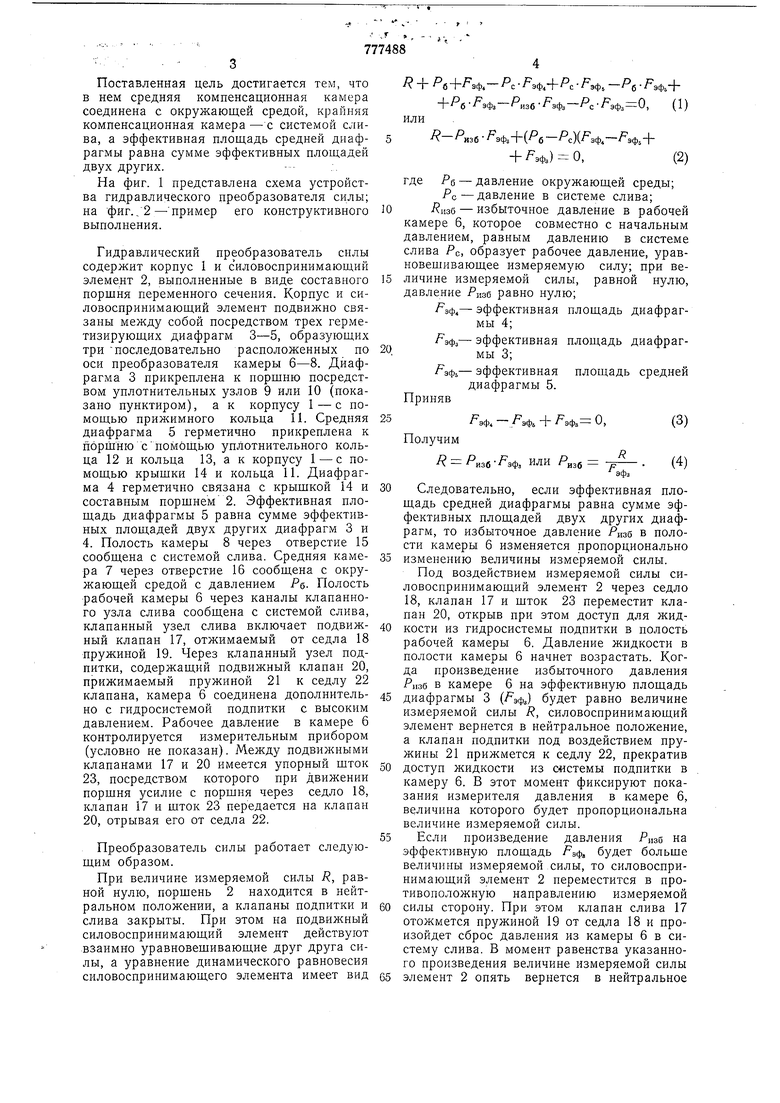
Поставленная цель достигается тем, что в нем средняя компенсационная камера соединена с окружающей средой, крайняя компенсационная камера - с системой слива, а эффективная площадь средней диафрагмы равна сумме эффективных площадей двух других.
На фиг. 1 представлена схема устройства гидравлического преобразователя силы; на фиг./2--пример его конструктивного выполнения.
Гидравлический преобразователь силы содержит корпус 1 и силовоспринимающий элемент 2, выполненные в виде составного поршня переменного сечения. Корпус и силовоспринимающий элемент подвижно связаны между собой посредством трех герметизирующих диафрагм 3-5, образующих три последовательно расположенных по оси преобразователя камеры 6-8. Диафрагма 3 прикреплена к поршню посредством уплотнительных узлов 9 или 10 (показано пунктиром), а к корпусу 1 - с помощью прижимного кольца 11. Средняя диафрагма 5 герметично прикреплена к порЩню с помощью уплотнительного кольца 12 и кольца 13, а к корпусу 1 - с помощью крышки 14 и кольца И. Диафрагма 4 герметично связана с крышкой 14 и составным поршнем 2. Эффективная площадь диафрагмы 5 равна сумме эффективных площадей двух других диафрагм 3 и 4. Полость камеры 8 через отверстие 15 сообщена с системой слива. Средняя камера 7 через отверстие 16 сообщена с окружающей средой с давлением PQ. Полость рабочей камеры 6 через каналы клапанного узла слива сообщена с системой слива, клапанный узел слива включает подвижный клапан 17, отжимаемый от седла 18 пружиной 19. Через клапанный узел подпитки, содержащий подвижный клапан 20, прижимаемый пружиной 21 к седлу 22 клапана, камера 6 соединена дополнительно с гидросистемой подпитки с высоким давлением. Рабочее давление в камере 6 контролируется измерительным прибором (условно не показан). Между подвижными клапанами 17 и 20 имеется упорный шток 23, посредством которого при движении поршня усилие с поршня через седло 18, клапан 17 и шток 23 передается на клапан 20, отрывая его от седла 22.
Преобразователь силы работает следующим образом.
При величине измеряемой силы R, равной нулю, поршень 2 находится в нейтральном положении, а клапаны подпитки и слива закрыты. При этом на подвижный силовоспринимающий элемент действуют взаимно уравновещивающие друг друга силы, а уравнение динамического равновесия силовоспринимающего элемента имеет вид
/ + ,-Яс-/ эф.+ .-Рб РЭФ.+ + 6- эфз-Я„зб-/зфз-Яс/эф, 0,(1)
или
-/изб Рэф,+(Рб -Яe)(Fзф,Fзф,-f
+ РЭФ,} О,(2)
где Рд - давление окружающей среды;
PC-давление в системе слива; изб - избыточное давление в рабочей камере 6, которое совместно с начальным давлением, равным давлению в системе слива PC, образует рабочее давление, уравновешивающее измеряемую силу; при величине измеряемой силы, равной нулю, давление Рцзб равно нулю;
эф,- эффективная площадь диафрагмы 4;
,- эффективная площадь диафрагмы 3;
эф,- эффективная
площадь средней диафрагмы 5. Приняв
. -.,эф5 + РЭФ О,(3)
Получим
R
- , или Ризб
(4)
Р.
Эфз
Следовательно, если эффективная площадь средней диафрагмы равна сумме эффективных площадей двух других диафрагм, то избыточное давление Ршб в полости камеры 6 изменяется пропорционально изменению величины измеряемой силы.
Под воздействием измеряемой силы силовоспринимающий элемент 2 через седло 18, клапан 17 и щток 23 переместит клапан 20, открыв при этом доступ для жидкости из гидросистемы подпитки в полость рабочей камеры 6. Давление жидкости в полости камеры 6 начнет возрастать. Когда нроизведение избыточного давления Рнзб в камере 6 на эффективную площадь диафрагмы 3 (,) будет равно величине измеряемой силы R, силовоспринимающий элемент вернется в нейтральное положение, а клапан подпитки под воздействием пружины 21 прижмется к седлу 22, прекратив доступ жидкости из Системы подпитки в камеру 6. В этот момент фиксируют показания измерителя давления в камере 6, величина которого будет пропорциональна величине измеряемой силы.
Если произведение давления Рцзб на эффективную площадь , будет больше величины измеряемой силы, то силовоспринимающий элемент 2 переместится в противоположную направлению измеряемой силы сторону. При этом клапан слива 17 отожмется пружиной 19 от седла 18 и произойдет сброс давления из камеры 6 в систему слива. В момент равенства указанного произведения величине измеряемой силы элемент 2 опять вернется в нейтральное

| название | год | авторы | номер документа |
|---|---|---|---|
| Компенсационная месдоза | 1980 |
|
SU993051A2 |
| Компенсационная месдоза | 1976 |
|
SU708180A1 |
| Компенсационная диафрагменная месдоза | 1973 |
|
SU470715A1 |
| Стенд для измерения тяги микродвигателя | 1978 |
|
SU732691A1 |
| Силовой регулятор с дистанционным приводом для автоматических трансмиссий транспортных средств | 1977 |
|
SU695860A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2007 |
|
RU2352975C1 |
| Компенсационная месдоза | 1974 |
|
SU498519A1 |
| Предохранительный двухседельный клапан | 1977 |
|
SU682715A1 |
| ГИДРОПРИВОДНОЙ НАСОС С ЭЛАСТИЧНОЙ ДИАФРАГМОЙ | 2010 |
|
RU2505707C2 |
| ОБЪЕМНЫЙ НАСОС | 2002 |
|
RU2212563C1 |
